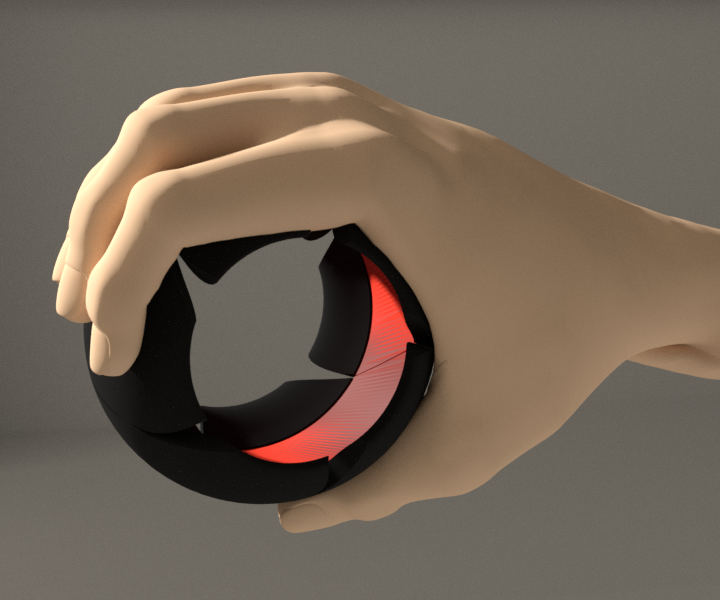
QLBRD is a input device (however can be a smart watch or phone as well if appropriate modules are plugged). Basic operation is simple. At the moment I plan to use 8 switches acting as buttons operated by one hand fingers (2 for index finger, middle and thumb and one for ring and pinky). This number isn't a hard limit, as for instance thumb switches can be replaced by 4 ways micro switch (joystick). As QLBRD has 9DOF (defrees of freedom) accelerometer/gyro/magnetometer it can detect hand position with high precision. There will be up to five basic positions relative to current working plane (more on this later) - up, side, down, front-up and front-down (first three are most useful though). Initial base position can be horizontal, vertical or whatever between. But lets assume you sit on a sofa with your hand freely resting aside with ball in palm:
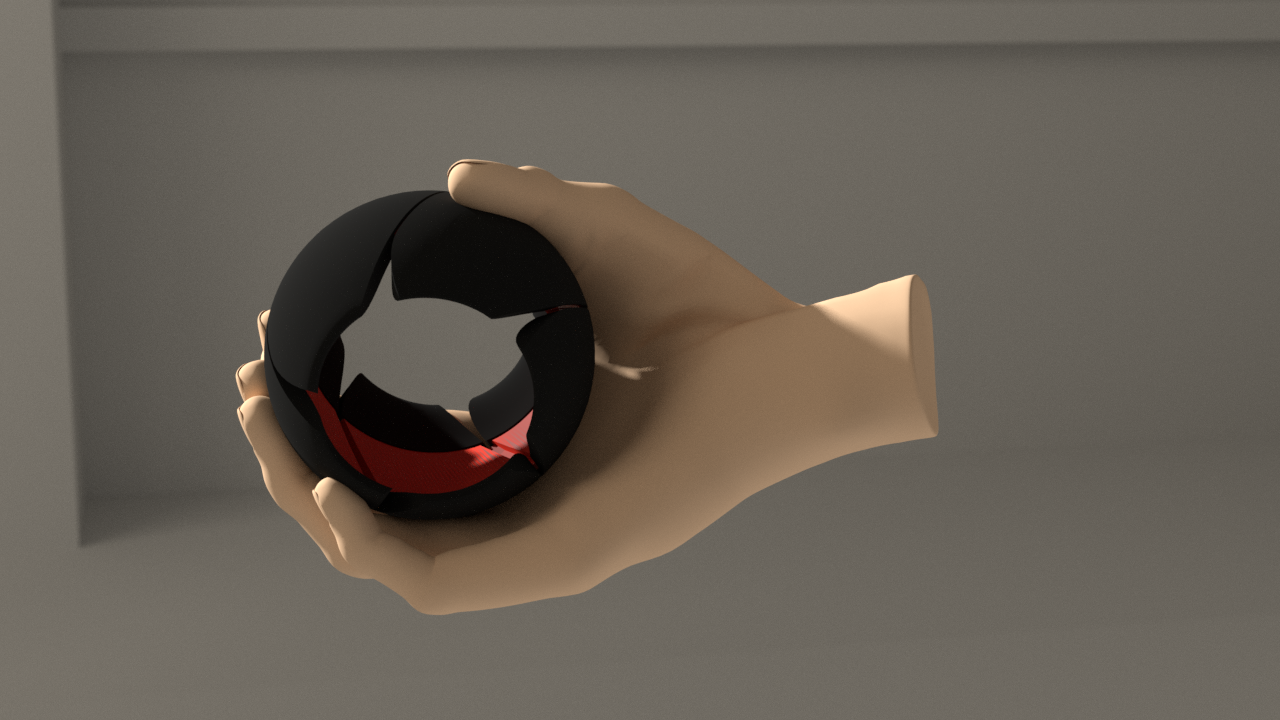
So side position would be:
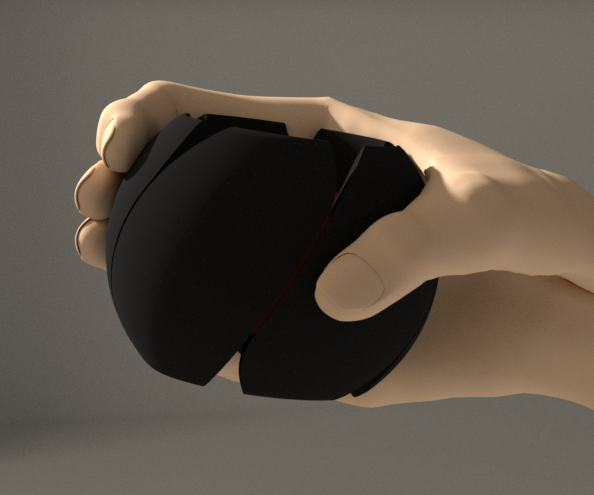
And down position:
Front-up and front-down are when delta of rotation in whatever configuration goes in clockwise or counterclockwise (in relation to sensor) but the plane of rotation is stable.
Of course initial position can be whatever, as I mentioned. Vertical for instance:

Which can occur for instance when you stand in front of high desk.
Mapping combinations of positions and keys will give full character set (and even more, like macros, if multiple keys pressed at once). At the same time QLBRD can also serve as pointing device, 3d manipulator or game controller if switched to this mode.
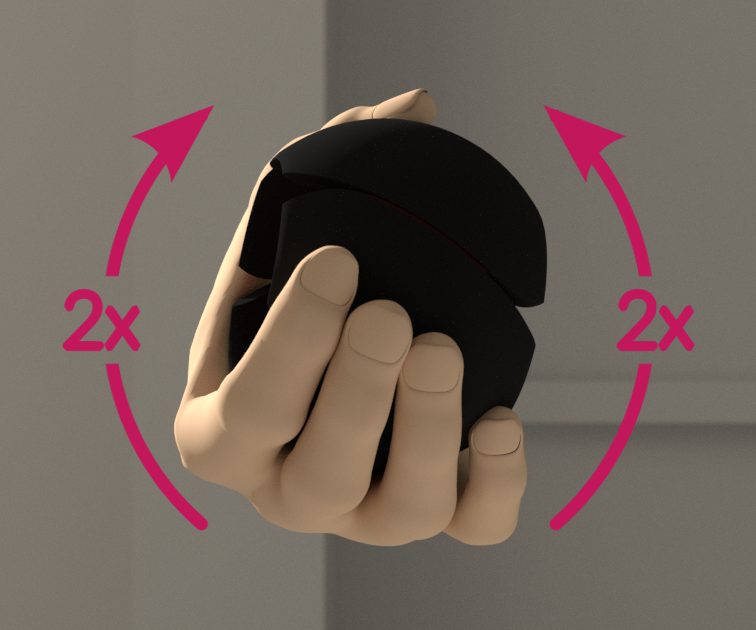
As to the working plane - there is no hard set position with relation to body in which mentioned positions should work. Wobbling hand twice clockwise and counterclockwise will tell the device to set the working plane. So, user can rest on his back, stand seat, have hand in any position and still be able to use QLBRD.
Wobbling like this:
Note: I tried to adjust a rig little too fast, so the hand you see isn't perfect (delicately speaking). More, proportions are close, but not perfect as well. Hand rigged model by by UP3D taken from http://www.blendswap.com/blends/view/75824 .
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.