 Leonardo Gomes
Leonardo GomesIn this build log, I would like to show how I built the touch sensor using the thermal transfer method.
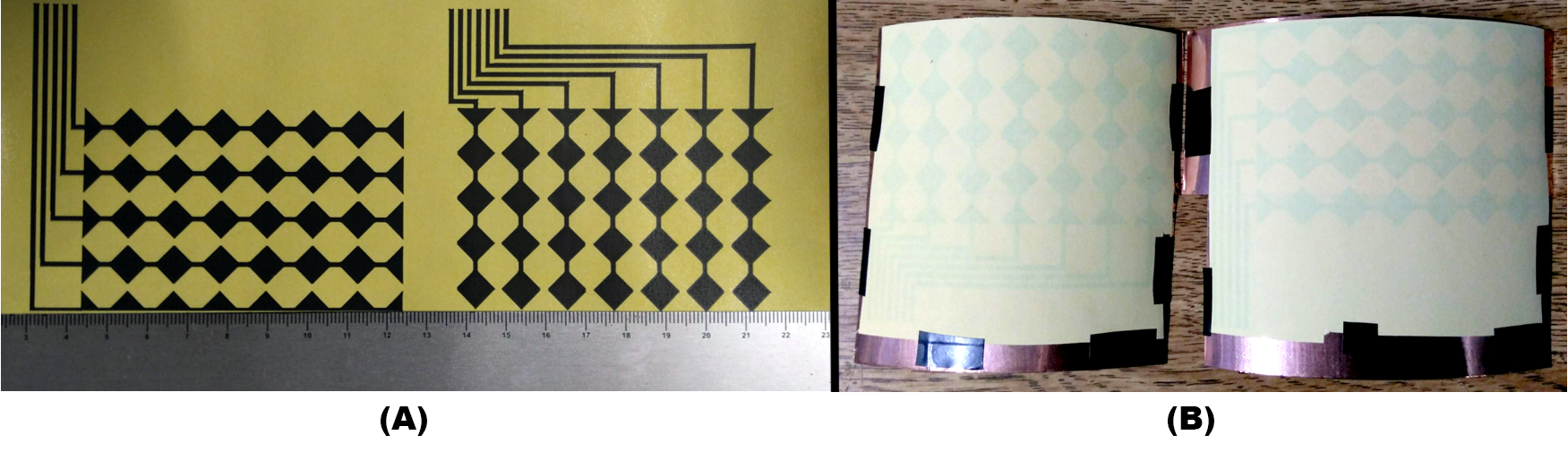
The method for creating the flexible touch sensor was similar to the one for PCB, but instead of using a copper board, we used a copper foil tape and a polyamide tape as a substrate. I have chosen the polyamide tape because of its relatively low cost and its insulating and high temperature stability characteristics. I printed the pattern for the lines and columns separately in the heat toner transfer paper, (A) and then we fixed each pattern over the copper foil tape (B).
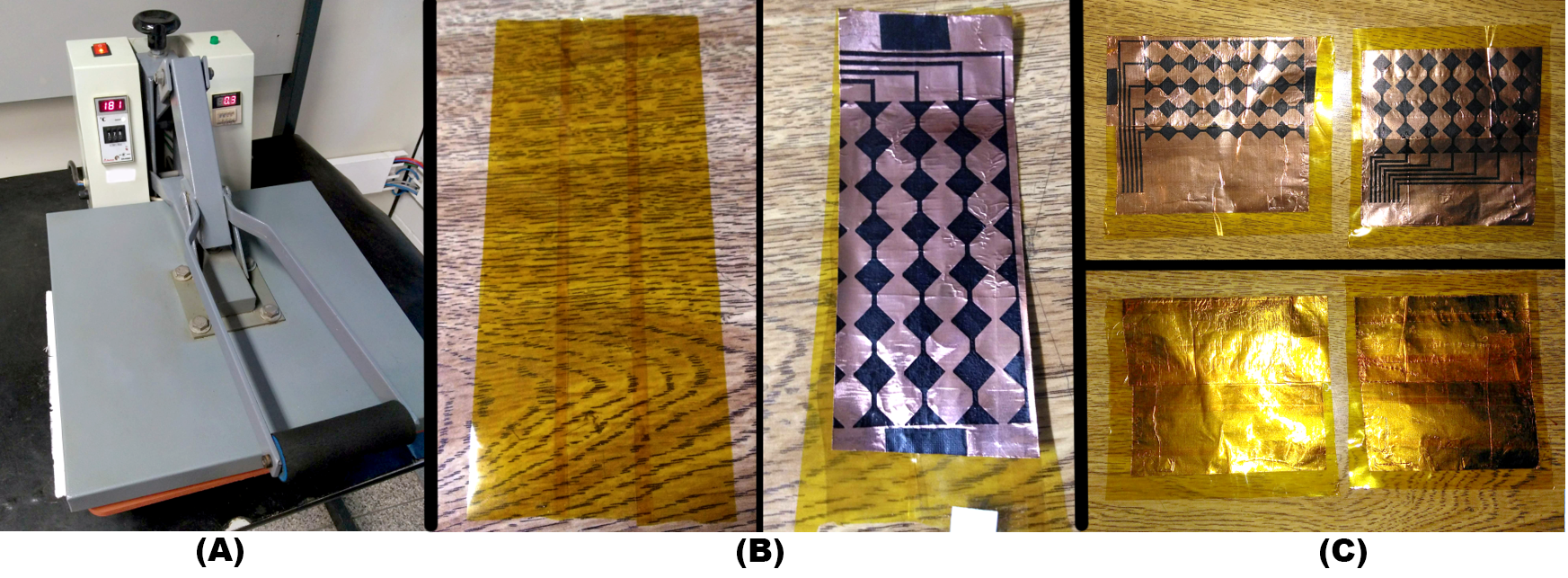
The copper foil tape with the printed paper was then placed on the surface of a heat press printer machine (A), which could be substituted by a clothes iron. The advantage of using the machine is to control the pressure applied to the hot surface, the temperature and the time of the process. In our method, we used 180°C and 70 seconds, which was enough for transferring the pattern from the paper to the cop-per tape. As the width of our polyamide and copper tape width were smaller than the sensor dimensions, we needed to join the strips for creating the substrate and the full sensor pattern (B and C). The copper tape was then glued on the polyamide tape.
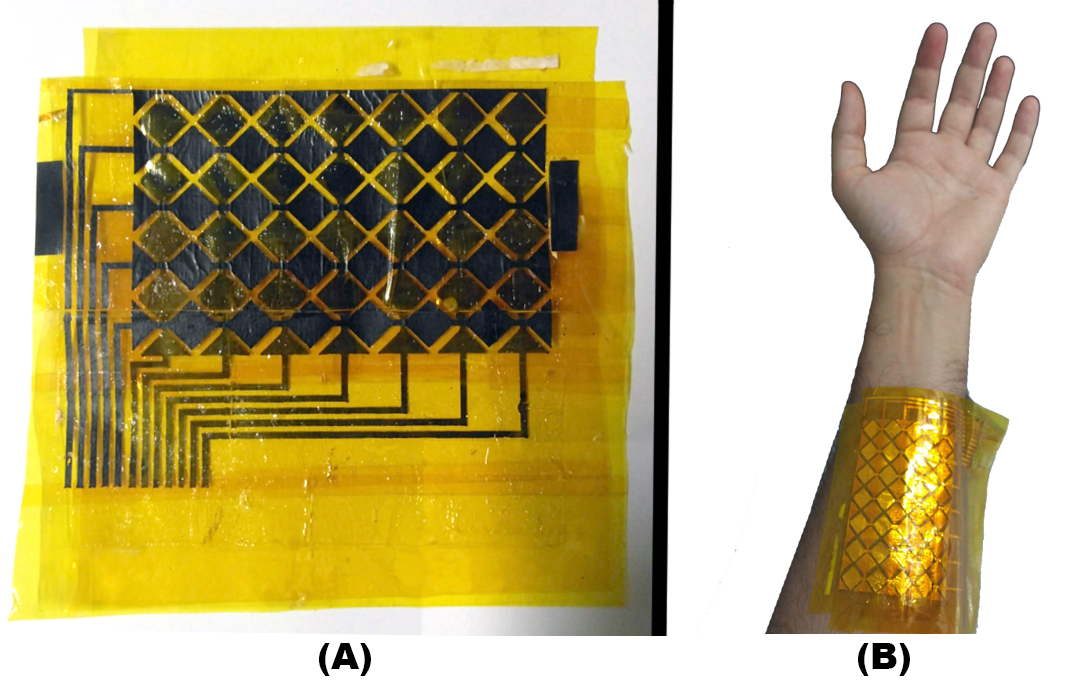
The last step of making the flexible touch sensor was to etch the copper in a similar way that is done for the PCBs. We dipped the copper and the substrate in a solution of ferric chloride, responsible for corroding and removing unwanted copper, leaving only the pattern of lines and columns of electrodes and its contacts. The two layers (lines and columns) were then cleaned, dried and glued one on the top of the other, creating the matrix pattern (A). The sensor was flexible enough so it could be placed around the wrist, meeting the initial requirement of designing a wearable touch interface ( B).
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.