 Tanmay Karpe
Tanmay KarpeI have used 2 Primus X boards in this project. One PrimusX is mounted on the drone while the second one is used to mount it on our wrist.
Now to control the drone with just the wrist movements all we have to do is map the values of Roll, Pitch and yaw of the wrist mounted PrimusX with the actual drone. The throttle control to the drone is calculated based on the velocity component of z axis. Thus with all the data about the Roll, Pitch, yaw and Throttle of the wrist mounted board, we can easily control our drone with just our wrist movements.
For that a connection has to be established between the 2 PrimusX boards. For this we create 2 AT commands, one for creating a socket and other to create UserID and password for the drone with which we want to connect.
Various API's available on Cygnus IDE such as Angle, Msp etc make it really easy to code.
To open drone experimentation to the world, Drona Aviation is crowdfunding for PlutoX on Indiegogo.
Support us and help us bring it to life: https://igg.me/at/flyplutox/tinkerers



 unfoundbug
unfoundbug
 CiferTech
CiferTech
 Adam Mansour
Adam Mansour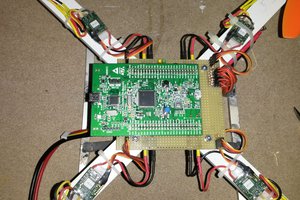
 hebel23
hebel23
This is a really cool project. Have you made the code available, I would like to check it out if possible!