0%
0%
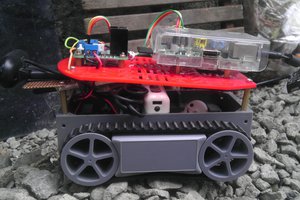
Wi-Fi Voice Controlled Robot with Google Assistant
Add voice control to your robot with the Google Assistant, Adafruit IO, and IFTTT!
 igorfonseca83
igorfonseca83Become a Hackaday.io member
Already have an account? Log in.
Just one more thing
To make the experience fit your profile, pick a username and tell us what interests you.
Pick an awesome username
hackaday.io/
Your profile's URL: hackaday.io/username. Max 25 alphanumeric characters.
Pick a few interests
Projects that share your interests
People that share your interests



 Hendra Kusumah
Hendra Kusumah
 Victor Serrano
Victor Serrano
 Sean Hodgins
Sean Hodgins
 Nyeli Kratz
Nyeli Kratz
error : “command” not defined
With respect to the line in the code ..
command->onMessage(handleMessage) ;