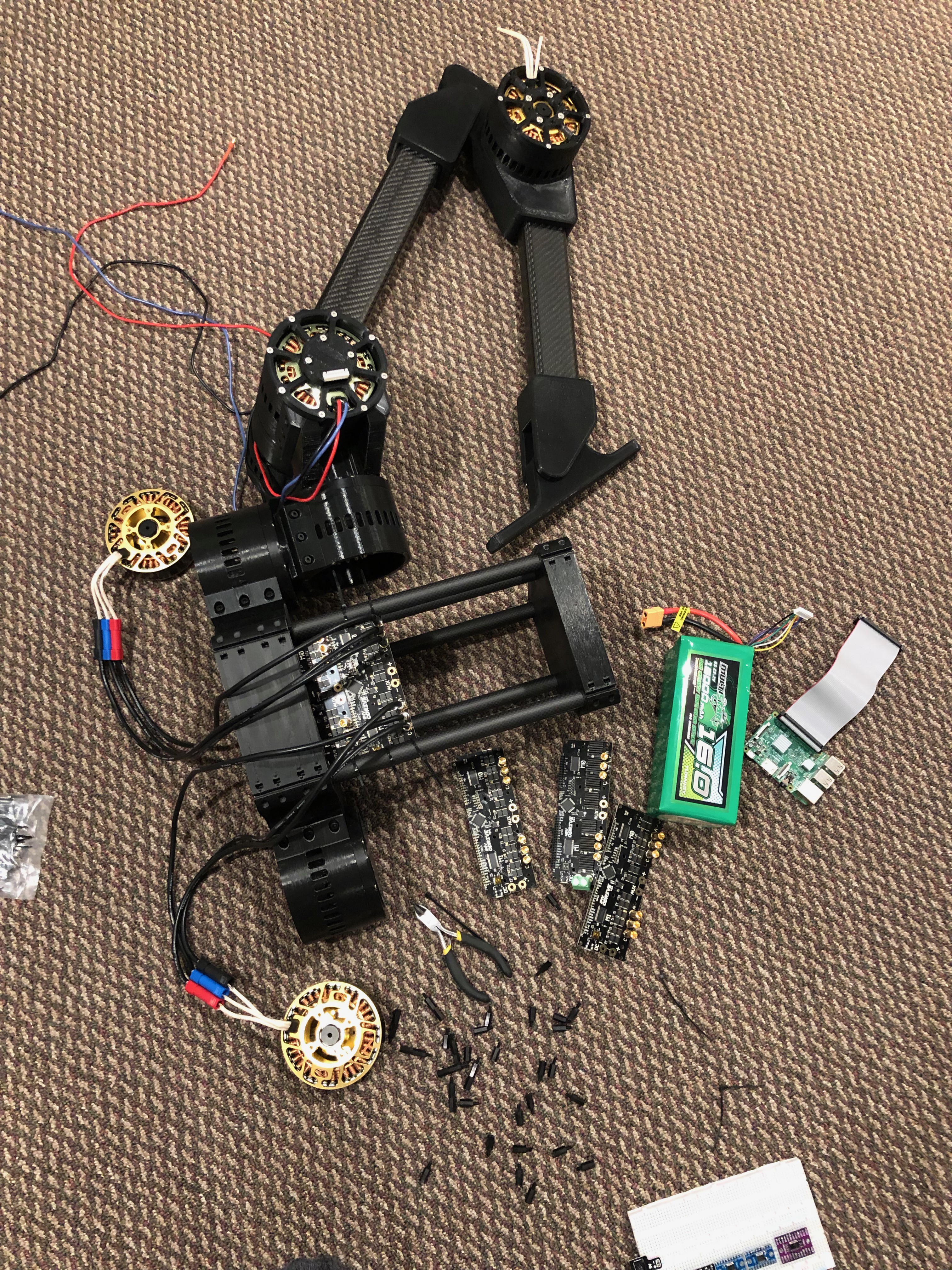
Over the last few weeks, I've been iterating on the design and making parts. The Blackbird is now close to being ready to walk.
The few remaining challenges to be solved have to do with the electronics, mainly wiring up the Raspberry Pi and synchronizing all the motors over CAN bus. I've chosen to use five MCP2515 CAN boards connected to the Raspberry Pi over SPI. Each of the five CAN channels will connect to a single ODrive board, ensuring the 1000 Hz control frequency required for closed-loop torque control.
Special thanks to ODrive Robotics for sponsoring this project.
More updates coming once it walks (hopefully within the next couple weeks!)

Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.