 Sauces0me
Sauces0meI may not be uploading any updates for now due to having AS exams in the near future, but here is the basic layout of the components of the machine.
OVERALL DESIGN EXPLANATIONS:
A delta style printer was chosen due to only needing 3 motors to be precisely controlled to move the arms around (not including the extra motor when used to print with plastic filaments. The materials that will used to build the machine were picked for being cheap. And the main selling point of the machine, the fact that it prints in metal, is due to the fact that it is imply easier to salvage parts for an induction heater compared to the special hot ends of normal printers.
LINEAR RAILS:
These will be made up off Bamboo skewers glue together, and using a makeshift jig to sand them all down to about a diameter of 1 CM. The carriages will be made up of stacked cardboard, and the arms bamboo chopsticks with magnets.
INDUCTION HEATER:
This will be made based on a 555 chip driving a mosfet connected to a step down transformer. To keep the cost as low as possible, the output signal will be left choppy and no inverter will be used to get a stable signal. A 555 based circuit is used instead of a ZVS driver to allow control of the frequency. A halbach array will be attempted to be used as the coil as an experiment and to pick up the slack by utilizing the magnetic field to its max potential. The nozzle will be made out of epoxy that can withstand up to 2000 F making printing in steel impossible but copper and aluminum still within the realm of possibility if the idea works. The printing material will be the metal oxide mixed with a suitable amount of carbon by weight to get rid of the oxide as well as hopefully act as an inert gas to prevent the metals from oxidizing quickly
OTHER ELECTRONICS:
The printer will used geared DC motors controlled by a single arduino UNO and L293D chips. Originally i wanted to build my own H-bridges for this but the parts were just to hard to collect quickly and i had a few L293D chips lying around. all these still fit within the RM50 ($12) Price ceiling. The feeding mechanism of the metal powder will be a vertical auger system pushing powder down a tube to the nozzle. This is due to me being limited when casting the auger due to my epoxy being a water evaporation based epoxy. This design also lightens the design considerably allowing me to buy cheaper motors. Any switches if added will be wired to resistors of varying value and connected to the Analog signal in to simulate a variable resistor but with constant values.
PROGRAM CODE:
This is the section that will be my greatest hurdle due to a lack of experience. The main outline now is converting the G-Code of each slice into a pathway for the nozzle. Using basic trigonometry, the motors will raise and lower the height accordingly to trace out the patterns before raising the nozzle height and moving on to the next level.
Thanks for reading, i may have one update soon on the design of the bamboo skewer linear rails, but don't hold your breath. More intensive updates will begin somewhere in December if possible. I will be the first to admit I'm not the greatest builder alive so please feel free to comment building methods or more efficient circuits that have parts that can be salvaged easily. I'll try to respond to each one, have a great day.

 MECHANICUS
MECHANICUS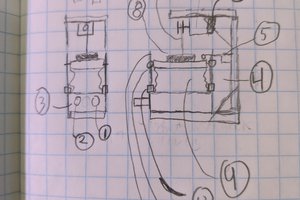

 Sina Roughani
Sina Roughani