Rudolph
Rudolph-
Wow, it's a chassis
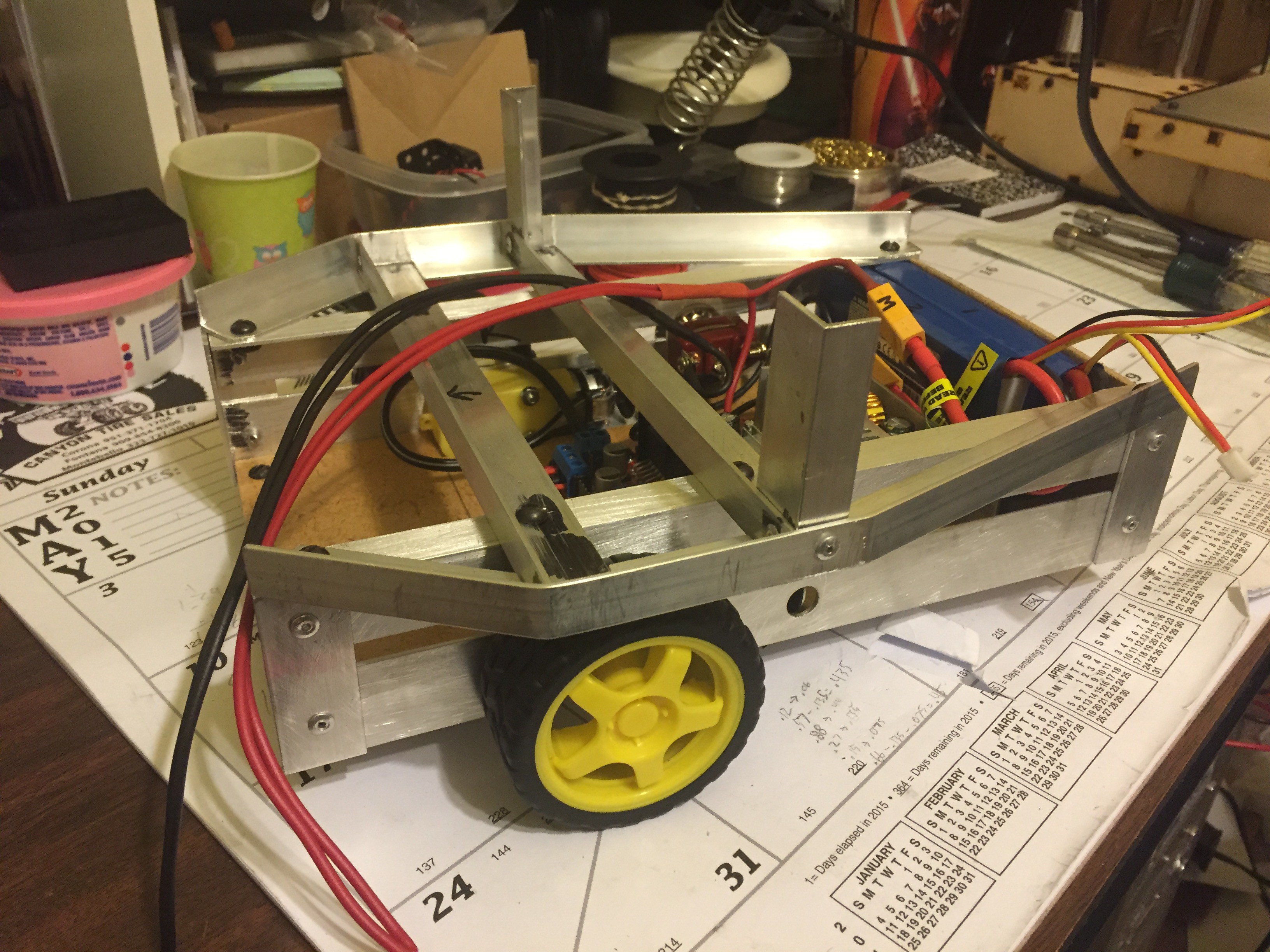
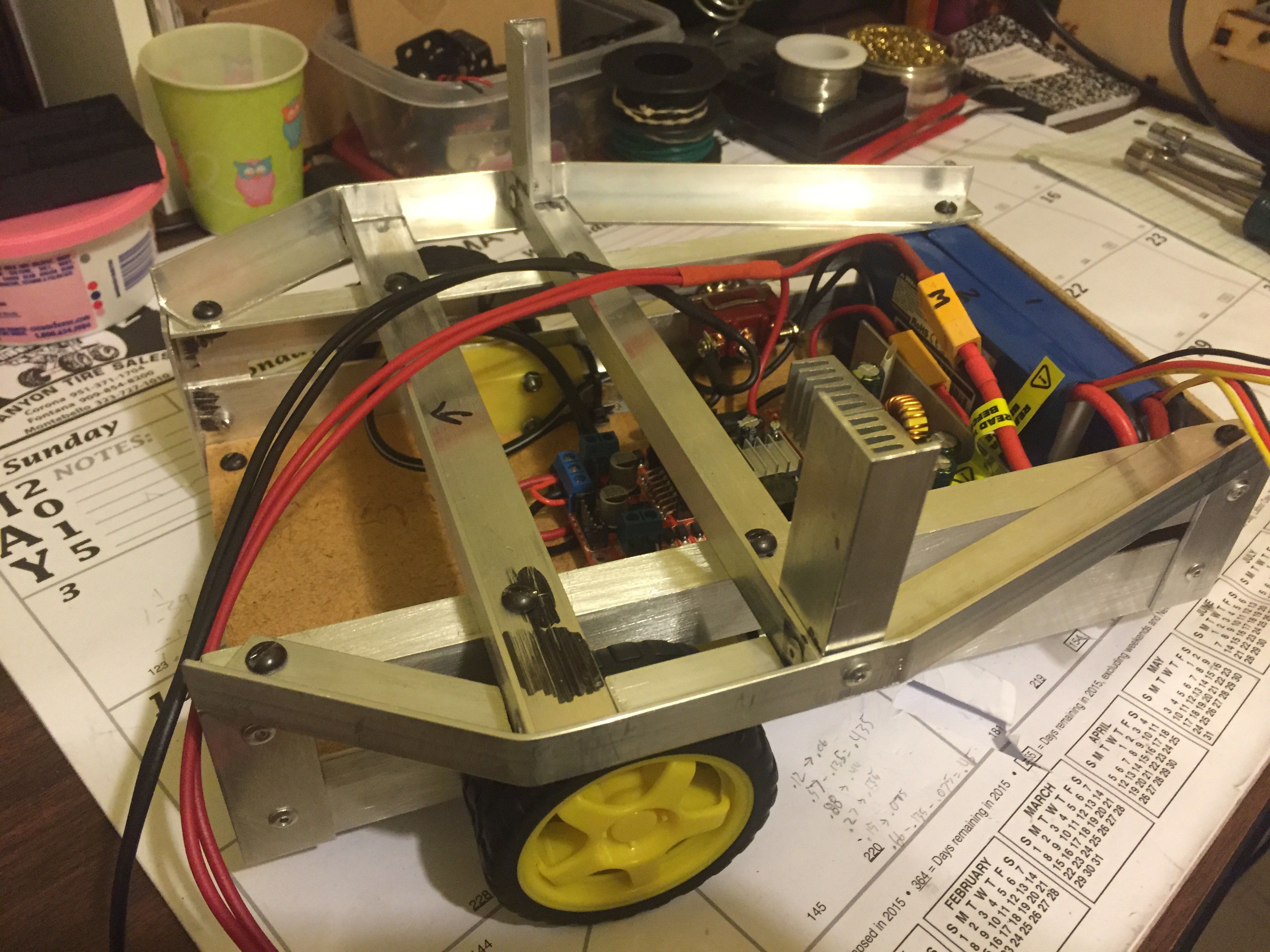
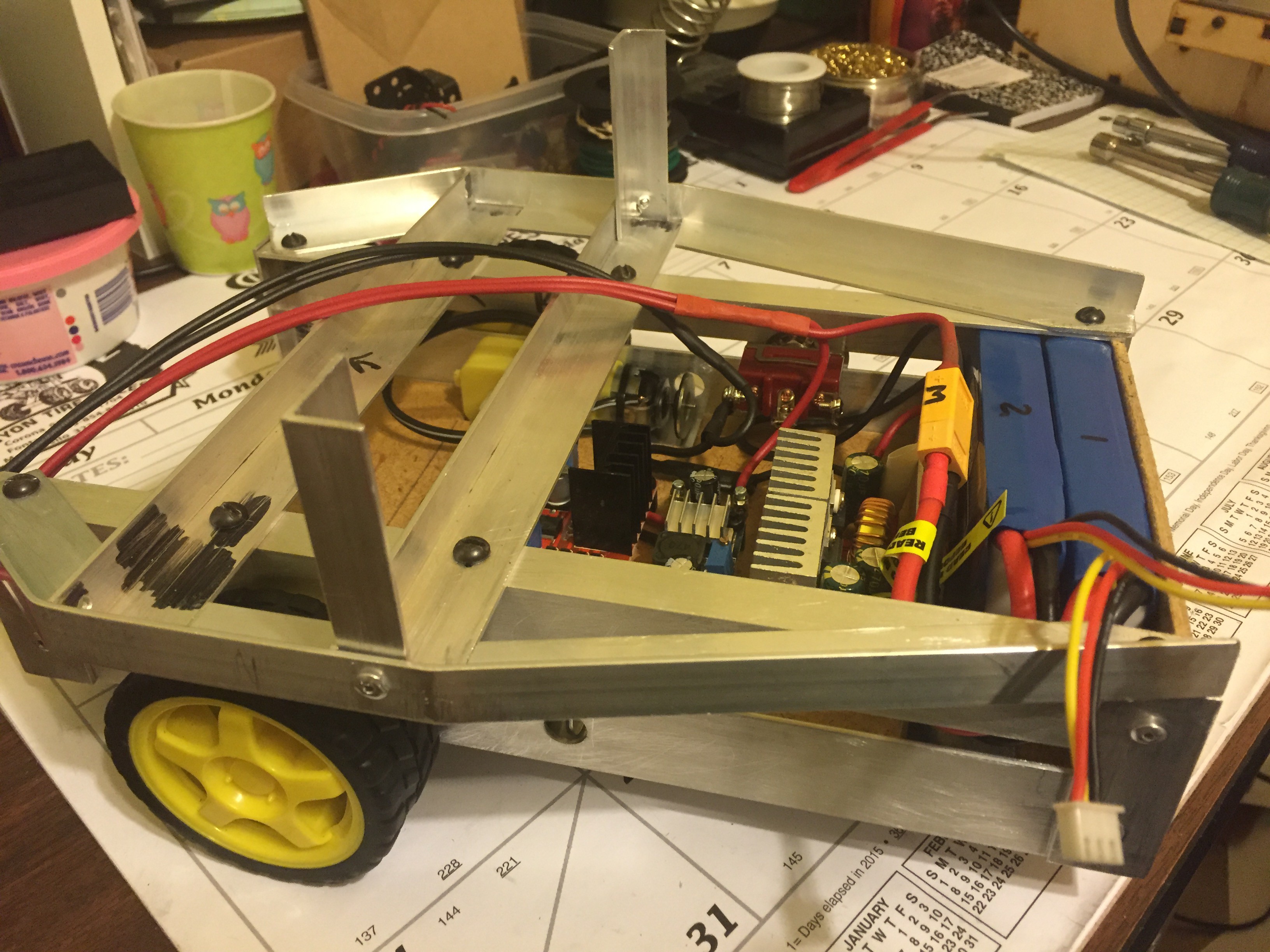
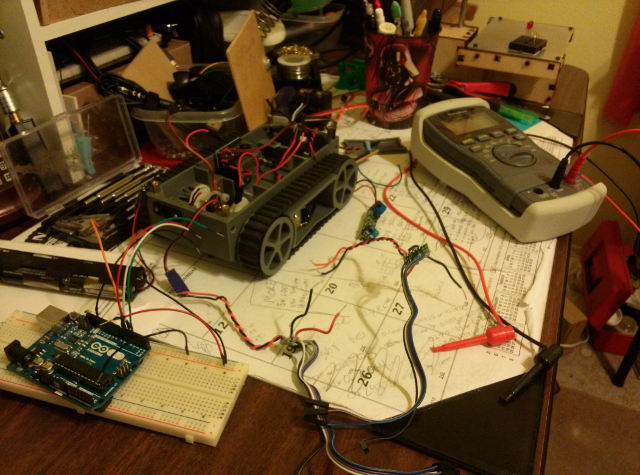
10/08/2015 at 06:45 • 0 commentsI got the new lipo batteries the other day, so I finally had to lay out the lower deck and actually make this thing a real robot. Well, closer to it, anyway.
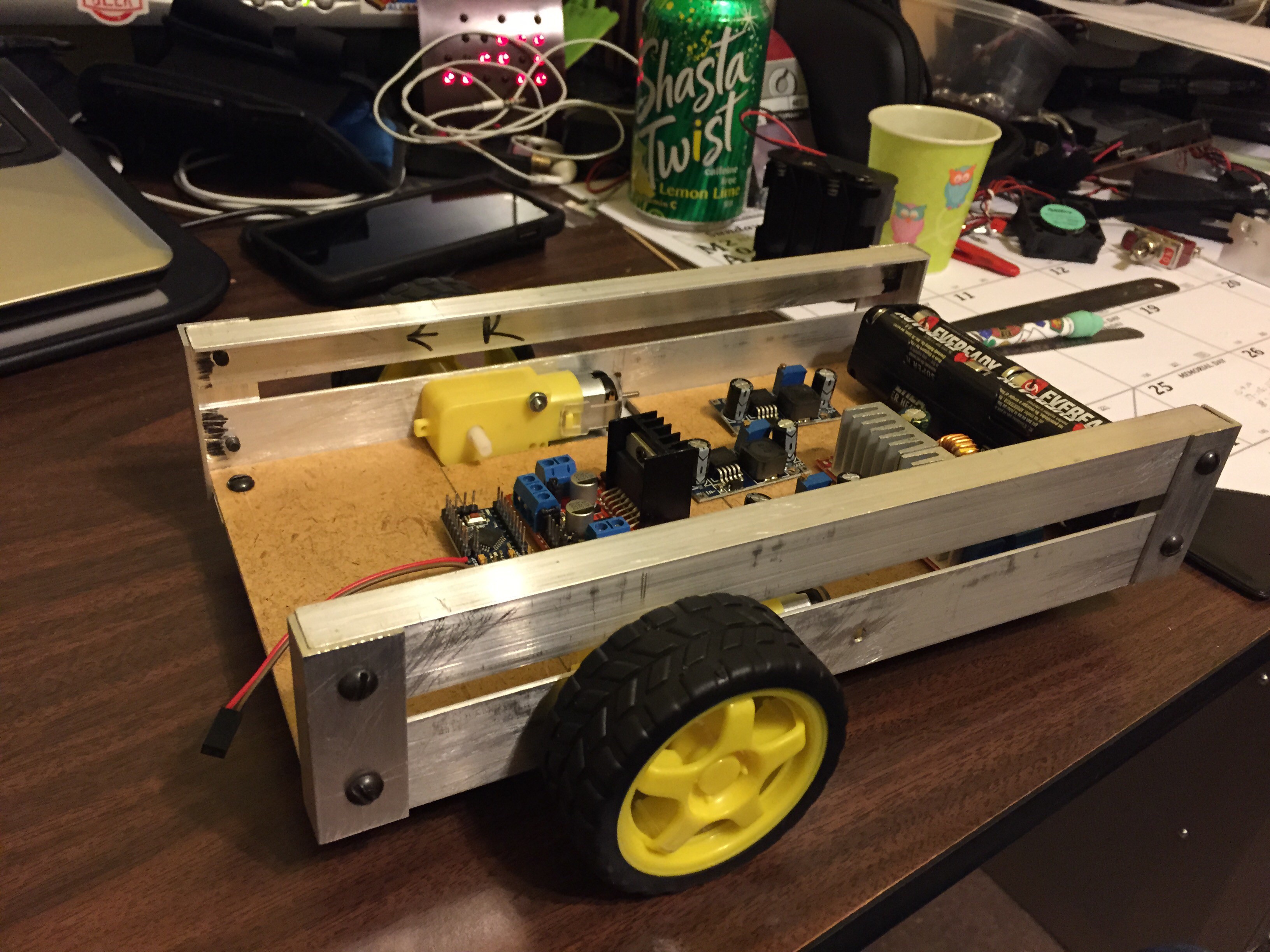
The bottom layer now has the 2 2200mAh 7.4 volt batteries, one for motor power and one for brains power. Also present are the big 5v smps for running the micros and BBB, and a smaller 5v smps for the drive motors and the chassis' pro mini and L298. The two long loops will supply motor battery power to the arms.
![]()
![]()
![]()
Oh yeah, the chassis-duino will use the MCP3208 to monitor battery cell volts and a couple IR corner sensors.
Tomorrow I'll cut out the top deck plate and stick on a pro mini and breadboard to start the chassis programming. Somewhere in that I'll also add the Hall effect sensors for the wheel encoders.
-
more metal stuff
09/23/2015 at 07:32 • 0 commentsWell, turns out the plastic standoff kit won't be here until Thursday. What's coming Wednesday is the cable to mod my old Kindle Fire, so that's what I'll be up to tomorrow. Well, after work, cause now my weekend's over...
Some more metal today, some more nibbler wrist destruction too. I also realized that I indeed had a pop rivet gun in the garage, so a quick trip to Harbor Freight got a selection of rivets to replace some of the Erector screws. And, of course, that came with even more wrist thrashing. Stupid joints getting in the way of robot building.
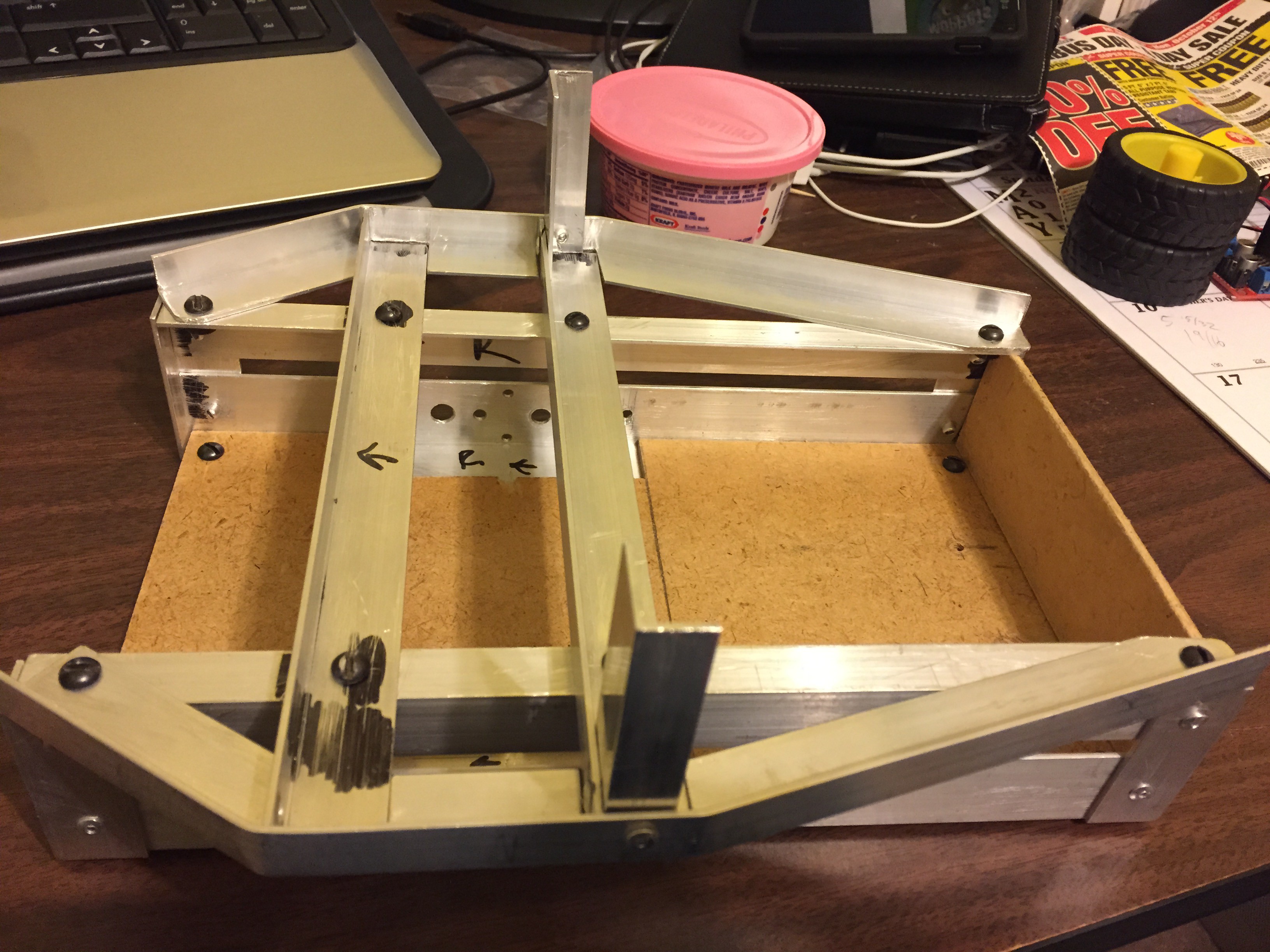
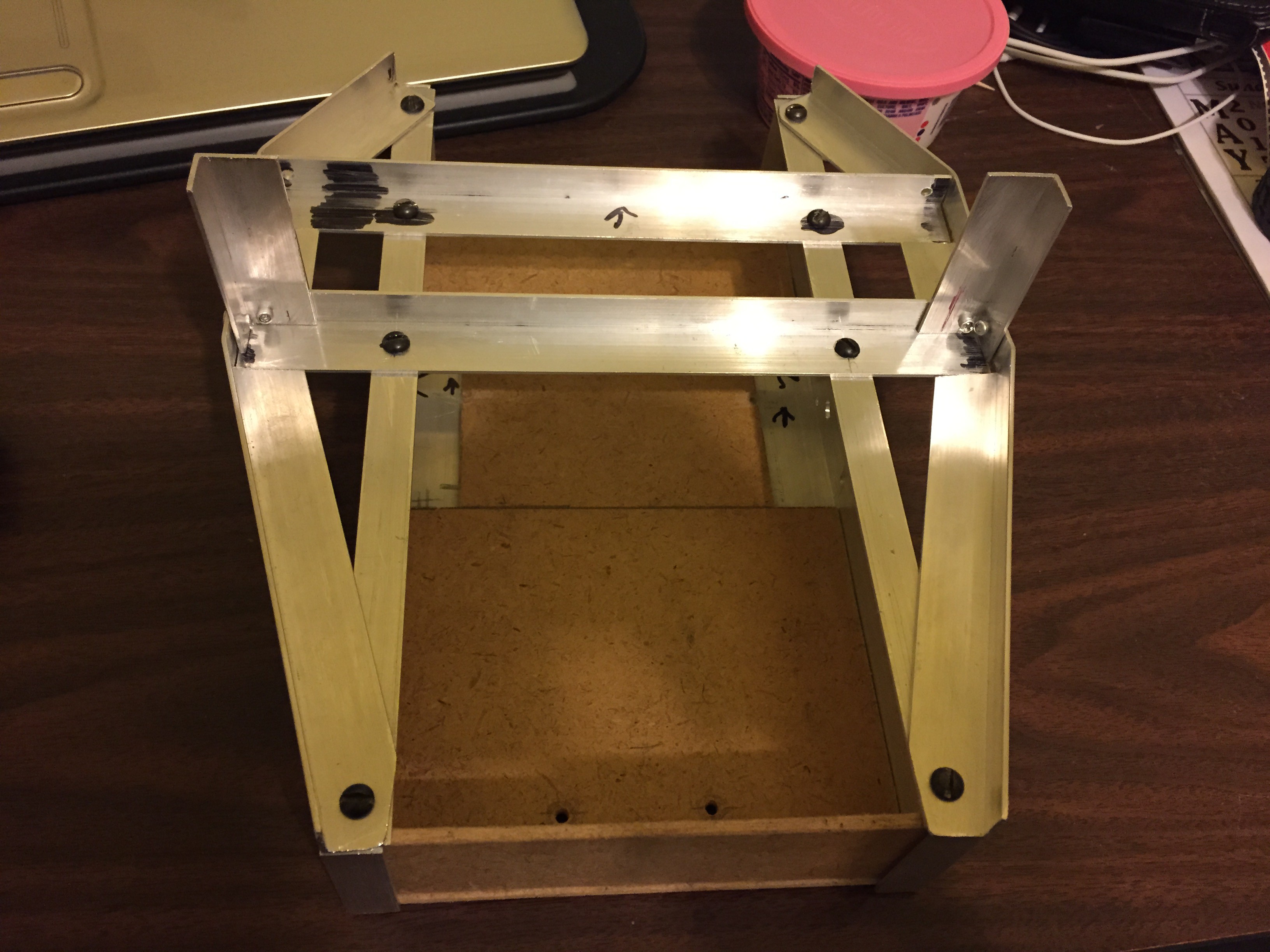
Anyway, I got the other side of the deck/cage thing done, as well as the beginnings of the final height of the main chassis. Still need to cut out the deck plate and decide how to style the back "roof".
![]()
![]()
Turns out ol' Ruprecht is shaped like a coffin now.
-
Little more
09/22/2015 at 08:08 • 0 commentsI didn't find what I thought I wanted for standoffs at the hardware store. So I ordered a kit o' plastic standoffs from Amazon instead. They'll be here Wednesday so I'll wait till then to figure out the power supply mountings.
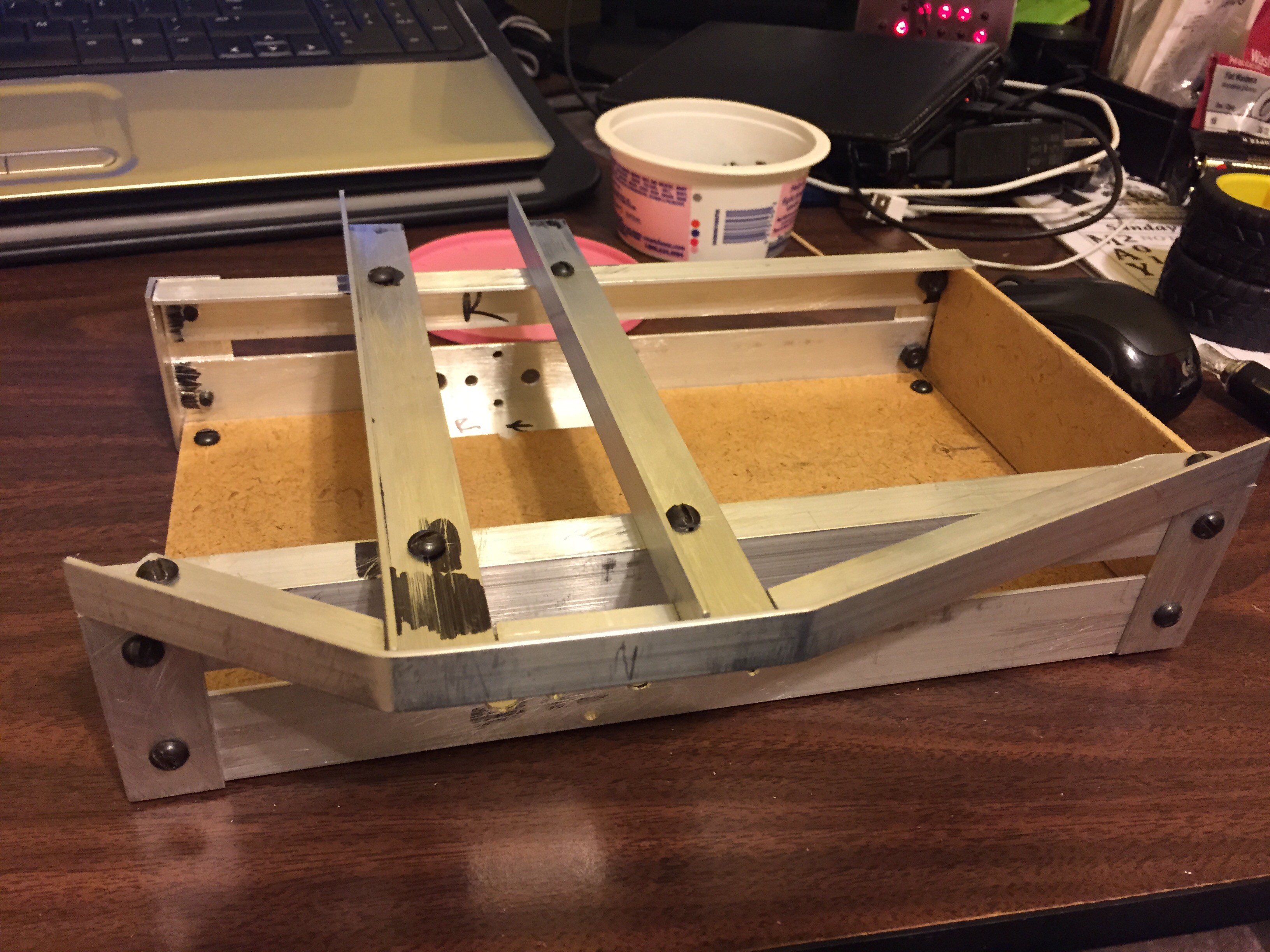
Rather than doing nothing, I went ahead and worked on some more metal bits. I managed to get the cross rails on, and even made one of the sides too. It's past midnight now, and my wrists are screaming at me for using the nibbler thingie. So I'll try and get the other side built tomorrow, and likely the next deck for the BBB too.
![]()
-
I made another video!
09/21/2015 at 20:43 • 0 commentsWho'd a thunk I'd ever make another video? Anyway, here it is:
-
Fitting parts
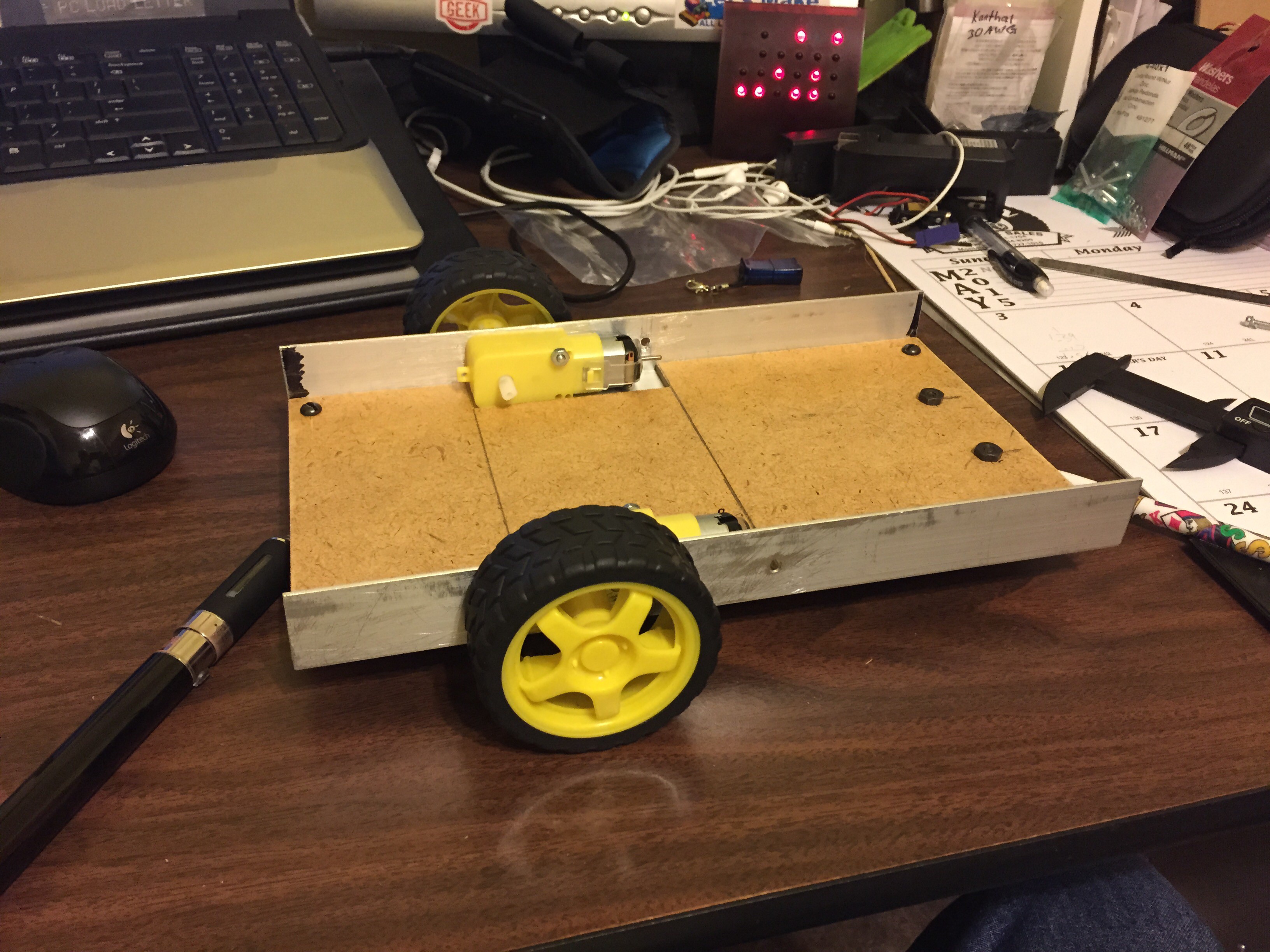
09/19/2015 at 06:29 • 0 commentsThe sides of the new chassis are done, now I'm back to figuring out component placement. It's so much nicer having all this room to work with compared to the old RP5 chassis.
![]()
Yes, I will clock the screws correctly for the real build.
-
New chassis
09/17/2015 at 06:36 • 0 commentsFinally got the new chassis cut out and put together. Yeah, it doesn't look like much, I just haven't had a lot of time to work on it lately. Now to fill this layer with batteries and dc-dc converters.
![]()
-
Ruprecht, the Redesigned Rudforce Research Robot
09/08/2015 at 02:41 • 0 comments![]()
Yeah, ol' Ruprecht now has five Rs. Here's the CAD drawing of Ruprecht running about at night, attacking children, stealing alcohol, and generally being a pest. You can't see the humans fleeing in terror 'cause it's nighttime.
Seriously though, I am honored that Ruprecht has been chosen as a semifinalist in this year's THP. Gotta go now, there so much time and so little to do. Wait.
-
Time for change
07/07/2015 at 11:57 • 0 commentsDear Diary,
It has indeed become apparent that the old RP5 chassis is not suitable for this project. In addition to my previous gripe about noise, it's also too narrow, and just generally too crowded. It is a neat chassis, and I look forward to using it someday, just not for Ruprecht (maybe for that K9 that I've been wanting to do).
To be clear, I am not abandoning this project. Instead I will build a custom chassis that's wide enough to handle the picture in my head of the pair of arms, head, and all the hardware (about 9 to 10 inches wide, or twice that of the RP5, and probably 12 or so inches in length). Still a small enough size to be apartment friendly, and wife approved(!). In the spirit of keeping this as low-cost as possible I will again build the decks/plates out of 1/8" fiberboard with aluminum angle and/or pine strip bracing, and I'll start off with those el-cheapo yellow gear motors, wheels, and magnetic encoders, and an imported L298 motor driver (basically a $25 drivetrain). All of these parts should be easily upgrade-able as time, desire, and budget allow.
-
Argh...
06/29/2015 at 04:27 • 0 commentsDear Diary,
Today I got to work on the software for the chassis-duino. As I was working on the motor-driving part I found that the right side motor was no longer driving. Weird, I thought. Naturally the drivers were in the absolute lowest, deepest, darkest part of the chassis. So I had to dismember the whole flippering thing again to try to diagnose the problem. And, sadly, I found that the right-side DRV8833 board no longer pushes out the voltage that it's supposed to. I even pulled the left one out to compare to, and the right one shows less than half of what the left does on the multimeter.
In doing all this I was reminded again of just how loud this particular chassis is when the motors are running. I'm not sure what to compare it to, but I have power tools that are quieter. I also know that it's not really a sound I want running autonomously around the house. And if I think it's too loud and obnoxious, I'm sure my wife will really dislike it.
So, now what? I could acquire another driver board (they're only like 5 bucks at Pololu) and get full volume out of the RP5. Or I guess I could start thinking about a different chassis getup. Briefly I considered ignoring the chassis for a while and just concentrate on the arm design and testing. Then I realized how much the arm design is dictated by the chassis design. Thus the title, Argh...
![]()
Ruprecht chassis in pieces, again...
-
Day three hundred and purpledey something...
06/28/2015 at 05:20 • 0 commentsTruth be told, I've spent more time in the last couple weeks looking for a job instead of working on the robot. I did, however, get some work done on the software end. The arduino code I had made for scheduling tasks was rewritten to be a library, and to remove the MSTimer2 library dependency. That library is now available on my GitHub. And I did start fiddling with Ruprecht's code too; RChassis has been started over, even though there wasn't much there in the first place. I realized that with stepping down to a '328 I don't have enough PWM pins to use the Servo library too, so I need to change to the SoftwareServo library instead. I also have a couple of ideas of how I want to proceed with the chassis code. And I've got a pretty clear plan on how I want to go with the arms too. Since there's no job-ing to be done on a Sunday I figure to try and get some actual work done on old Ruprecht tomorrow, ideally both software and hardware.
Project R
Project R(rrrr) is a low-budget research robot for the rest of us.