 Cadmium
CadmiumOne of our focal points for the development of Hector 9000 is, to make it as easy as possible to replicate the machine. Thus we
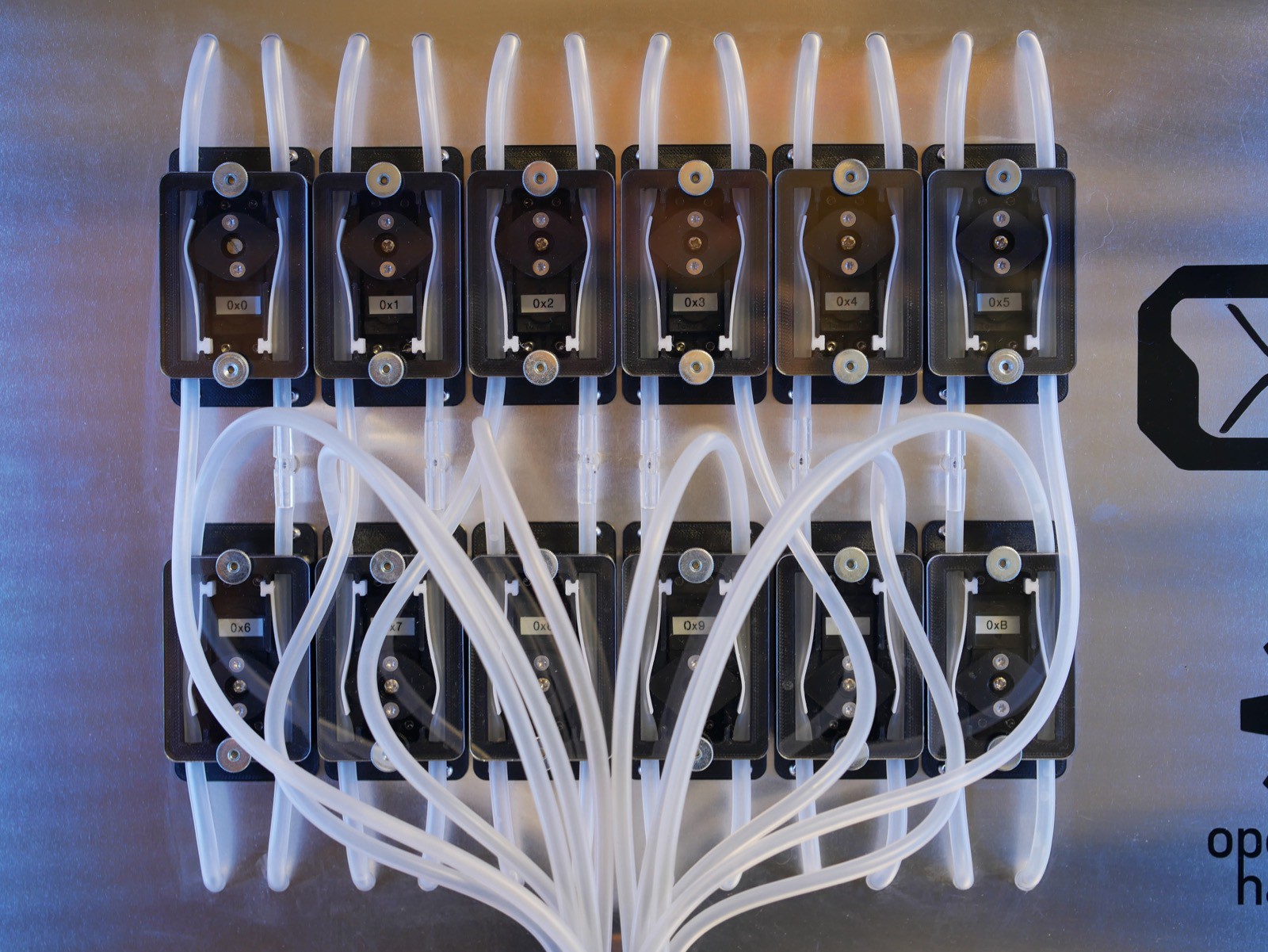
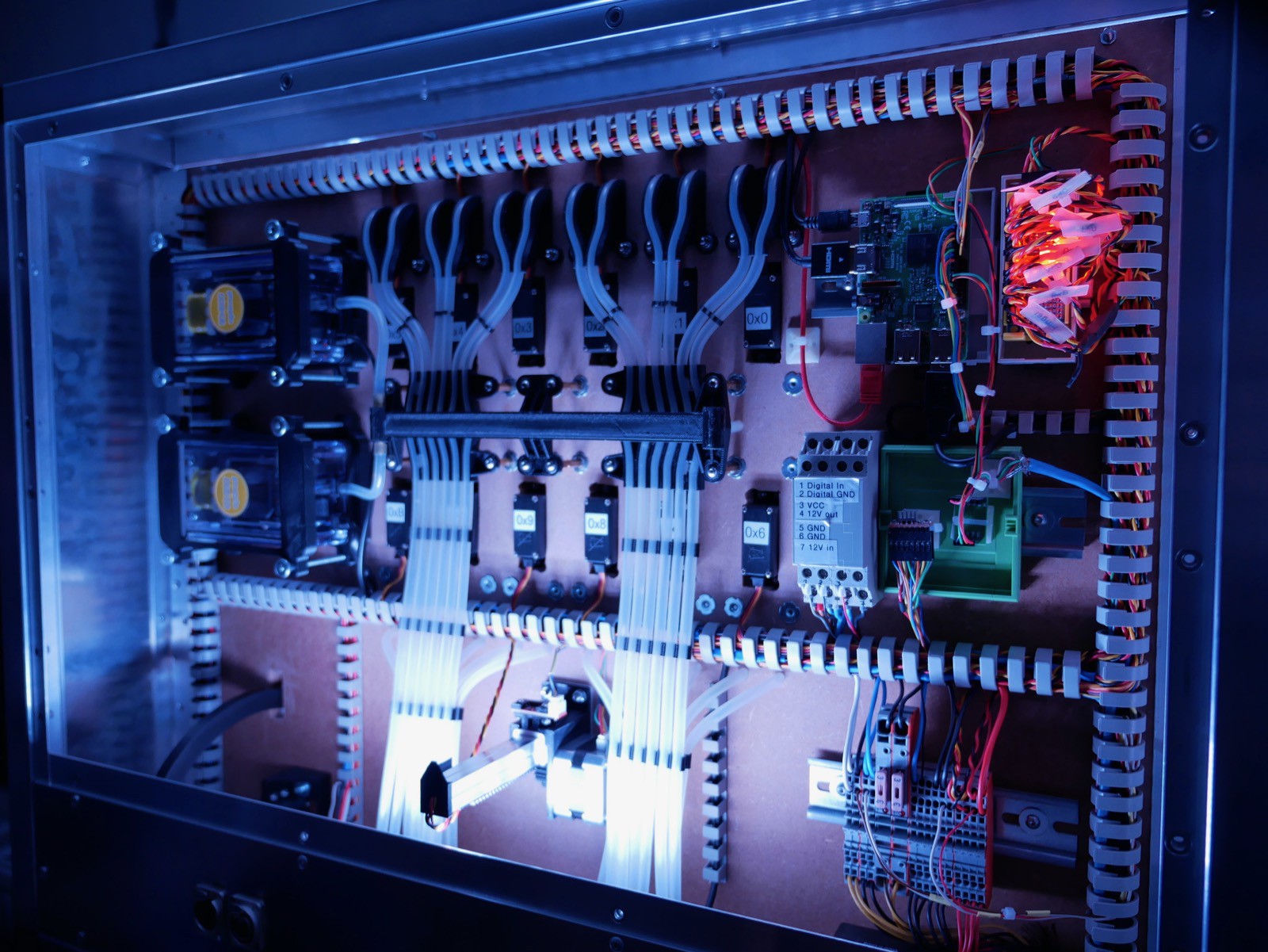
- used of the shelf & easy to source electronic components
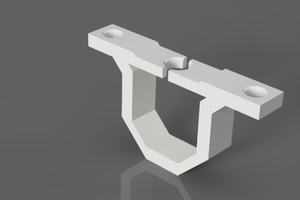
- made the mechanical hardware parts mainly by FDM printing (without support)
- host the software on GitHub
- try to make a good documentation
We also made most of the functional parts independent from the structural parts to give a high degree of freedom for an individual case/cabinet design.
During the work on Hector 9000 we had a lot of ideas for additional features and improvements. Here are some of them:
- Ice dispensing unit
- Cocktail Umbrella dispensing unit
- Dispenser for sugar
- GUI based on Qt
- Statistic functions (Best Drink of the Day, ...)
- AI to create new Coctail recipes














 Frank Herrmann
Frank Herrmann
 jdelbe
jdelbe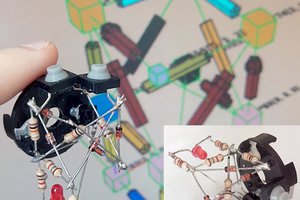
 Anderson Antunes
Anderson Antunes
 Brien Allison
Brien Allison
Love a good Barbot, but never been a huge fan of perstaltic pumps. Usually too slow for my liking. The one I've been playing with, I have a rubber stopper with 2 drilled holes. A small hole for a small tube for air to be pumped into the bottle and a larger hole for a hose that goes to the bottom of the bottle. Air gets pumped in and pressure pushes the liquid out the hose.
If you want even more needless features get a magnetic stirrer as your cup platform. Drop a Magnetic stir bar in your glass and then when the drink comes in just turn the stirrer on and mix as you make.