 Igor Angst
Igor Angst
0%
0%
CasioKeyBot
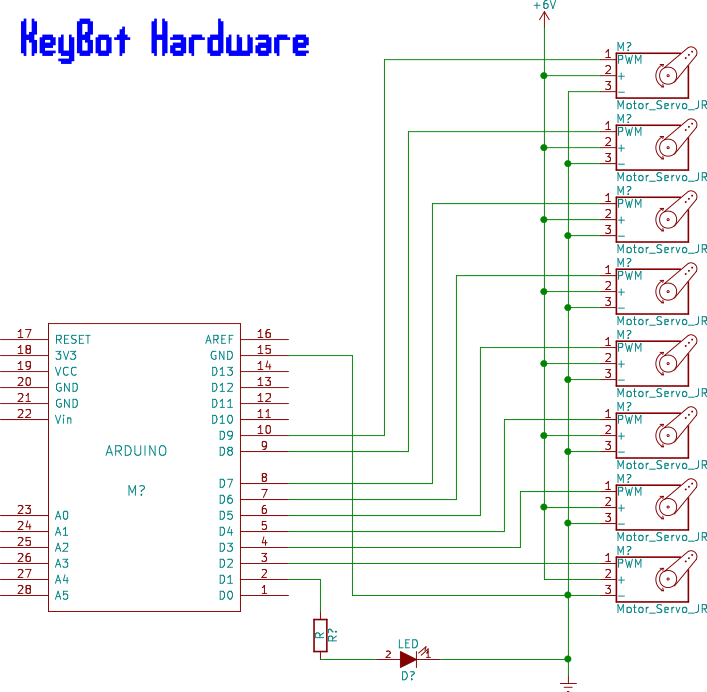
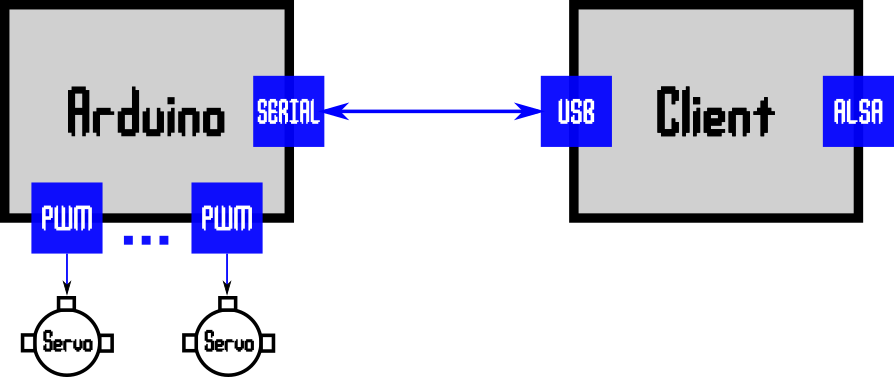
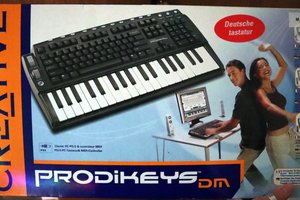
This funky Arduino-powered robot adds MIDI capability to an old Casio SA-21 keyboard.
Become a Hackaday.io member
Already have an account? Log in.
Just one more thing
To make the experience fit your profile, pick a username and tell us what interests you.
Pick an awesome username
hackaday.io/
Your profile's URL: hackaday.io/username. Max 25 alphanumeric characters.
Pick a few interests
Projects that share your interests
People that share your interests

 Bernhard "HotKey" Slawik
Bernhard "HotKey" Slawik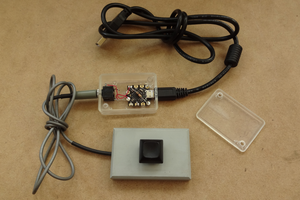
 Dan Julio
Dan Julio
 David H. Bronke
David H. Bronke
 Alistair MacDonald
Alistair MacDonald
i love the laser cut supports and hammers!