 Timo Birnschein
Timo BirnscheinLet's take a quick look at the payload the remote is sending all the time. In fact I saw multiple payloads and I can't yet figure out what they all are for.
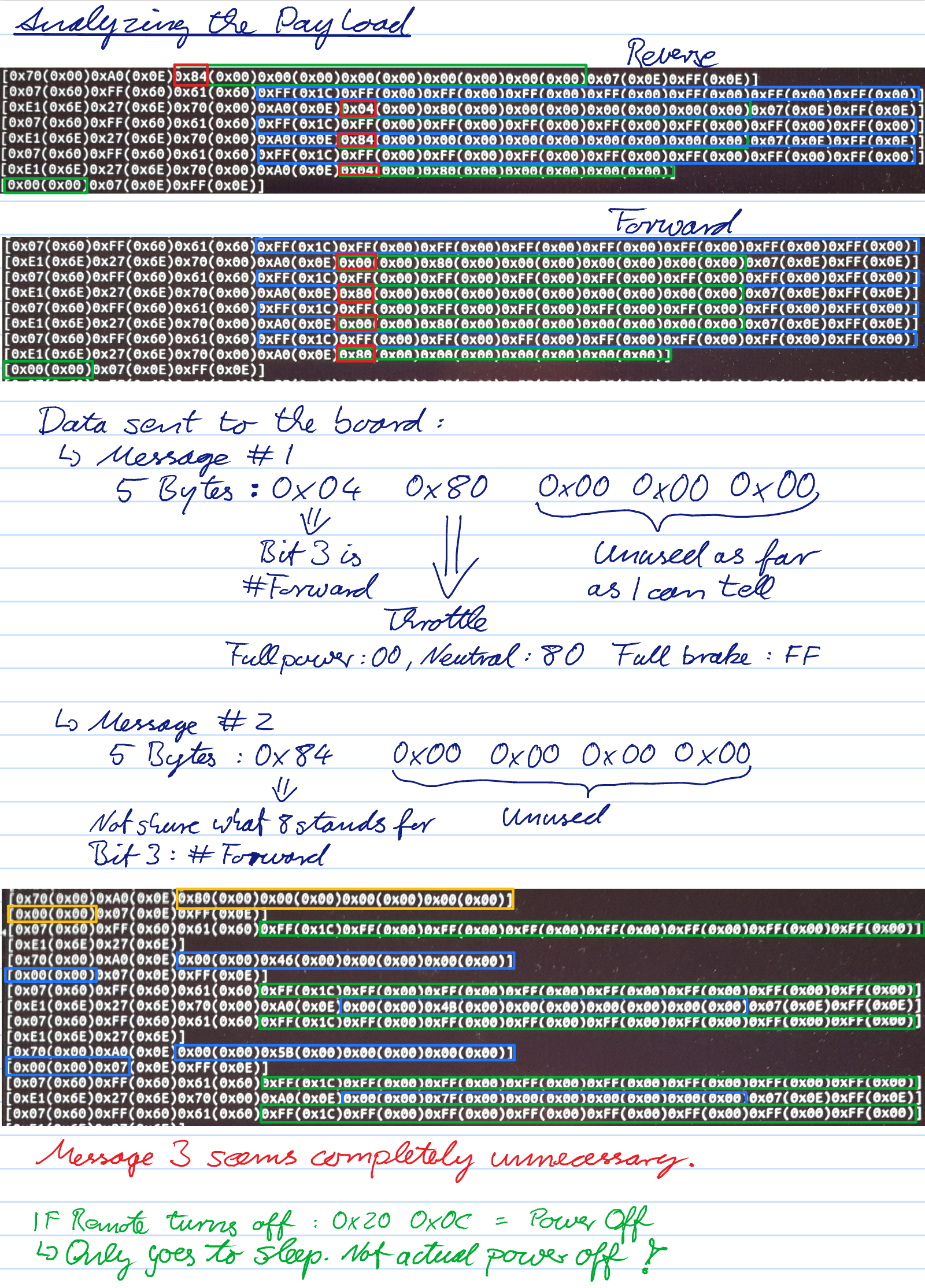
Everything in green is what the remote sends to the motor controller. There are two types of messages. Both contain if the drive direction is forwards or backwards but only one of them dictates how fast it should go that way. This seems incredibly redundant to me and if I was told to save energy, I would not send unnecessary messages. I have not tried NOT sending that second message but I suspect the motor controller wouldn't care... who knows.
The throttle has it's center (zero power) at 0x80, full brake at 0xFF and full throttle at 0x00. The throttle as well as the brakes run into saturation and start clipping about 10 to 20 values from min/max. The exact numbers are in my source code. There is absolutely no filtering going on from the potentiometer, through the remote into the motor controller all the way into the BLDC motor controllers. Inside the BLDC controllers the real magic happens, but I don't have access to those.
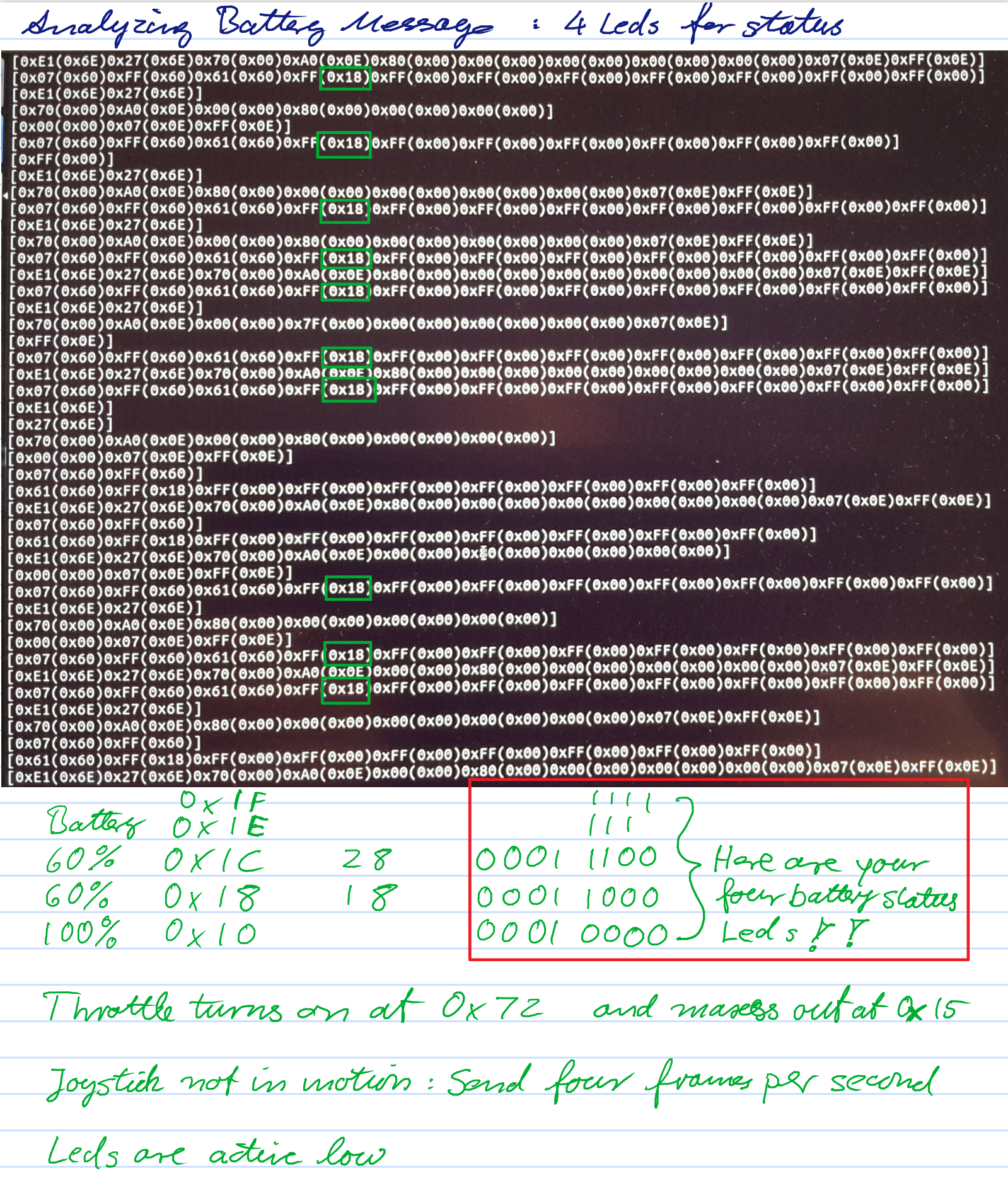
The battery message from the motor controller is also pretty random. Eight bytes are being sent back to the remote of which only one contains the information about the state of charge. The Acton remote turns this into some blink patters on the same LED. I chose to wire this straight to four individual LEDs like all other remotes for this motor controller.
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.