0%
0%
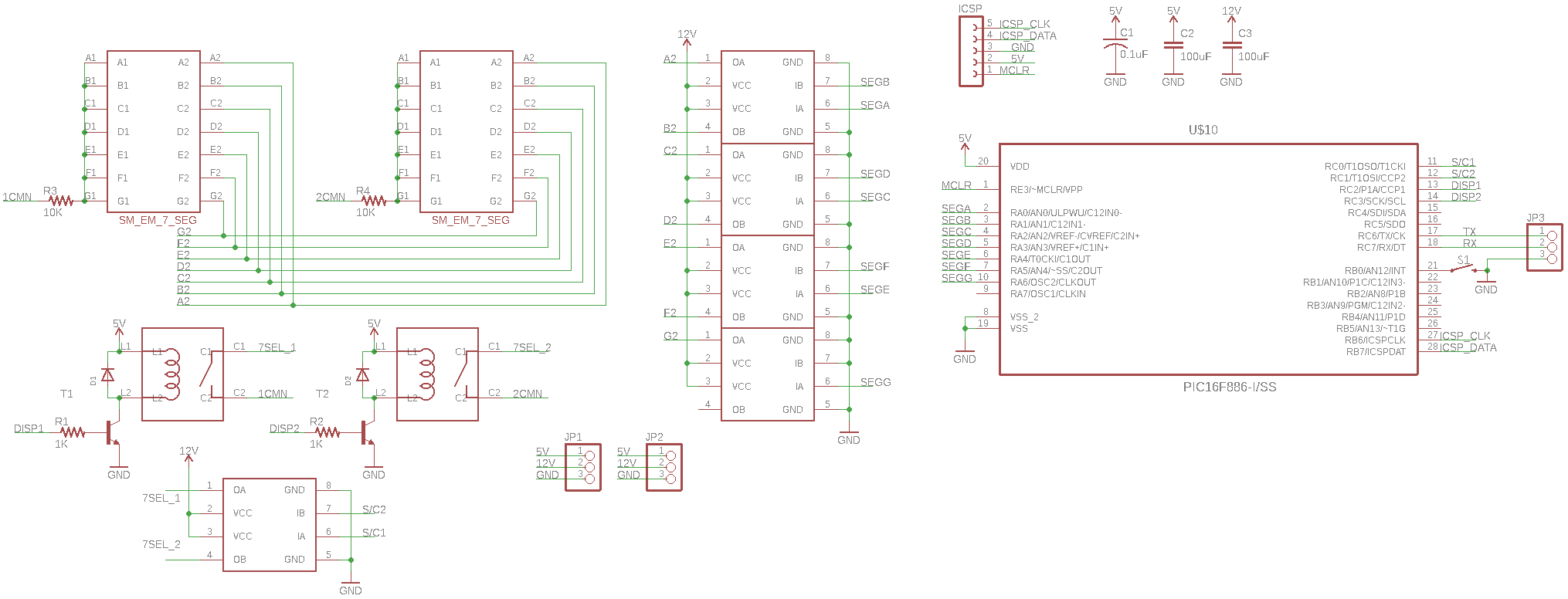
Wifi Flip Clock/Youtube Counter
I see lots of electromechanical 7 segment flip clocks and such but no easy to use universal controller modules so this is my take on it
 sjm4306
sjm4306Become a Hackaday.io member
Already have an account? Log in.
Just one more thing
To make the experience fit your profile, pick a username and tell us what interests you.
Pick an awesome username
hackaday.io/
Your profile's URL: hackaday.io/username. Max 25 alphanumeric characters.
Pick a few interests
Projects that share your interests
People that share your interests

 John Lonergan
John Lonergan
 Samuel A. Falvo II
Samuel A. Falvo II
Did you make the code and files available somewhere?
Very good job on the project.