Jason Bender
Jason Bender-
Prototype (Version 0.1) Complete
11/09/2018 at 10:36 • 0 comments09 Nov 18 | Jason Bender | Taunggyi Myanmar
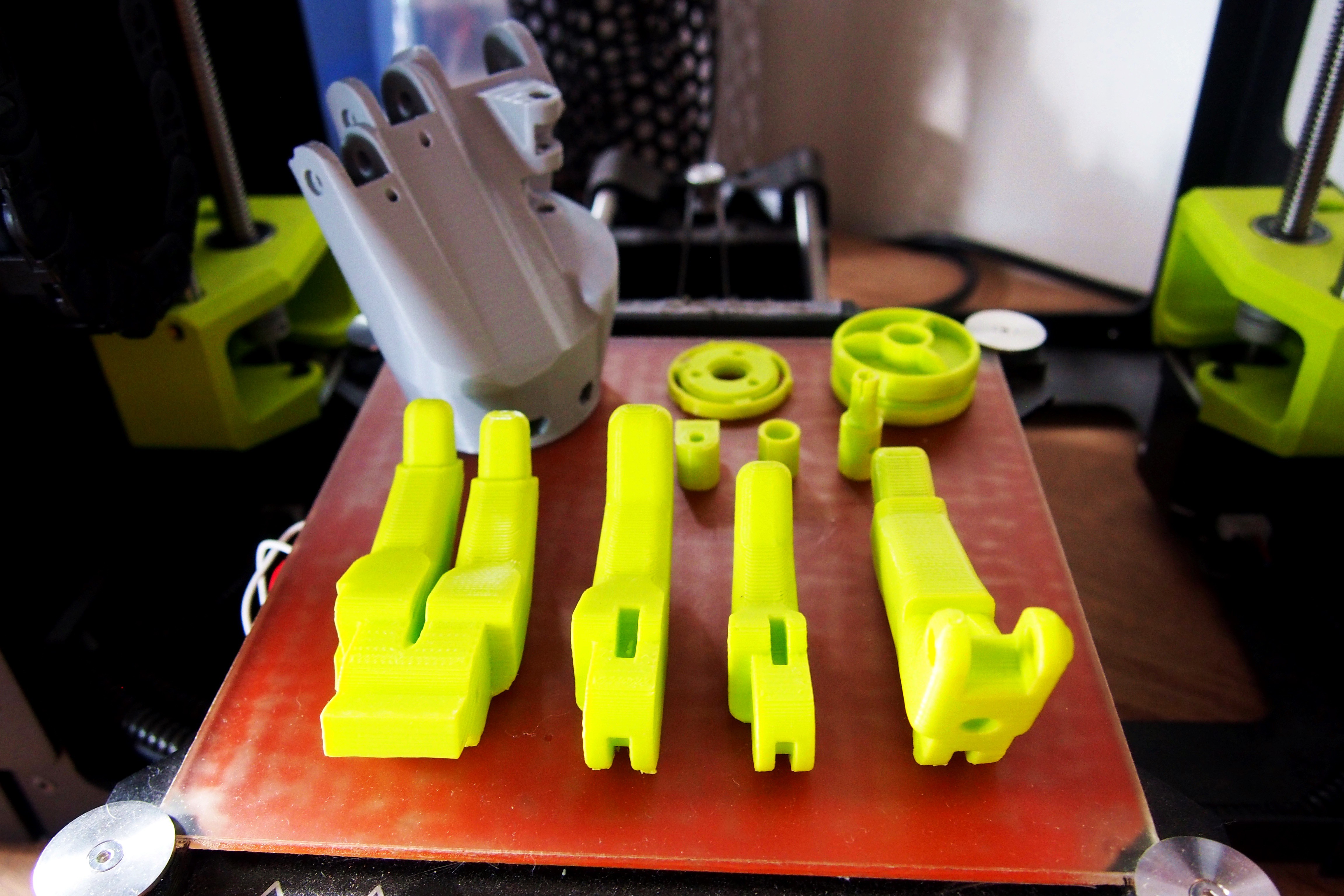
The first full hand is printed and assembled. It's not perfect, and already I see some things I don't like, but it should be good enough to do some simple tests and shoot some video to help better detail the various grips and functions of the hand. Instead of breaking down every part in a long post, the plan will be to shoot some video (hopefully this weekend), and then I can explain the various sub-assemblies when I go over some of the 'good, bad, and ugly' of the first prototype.
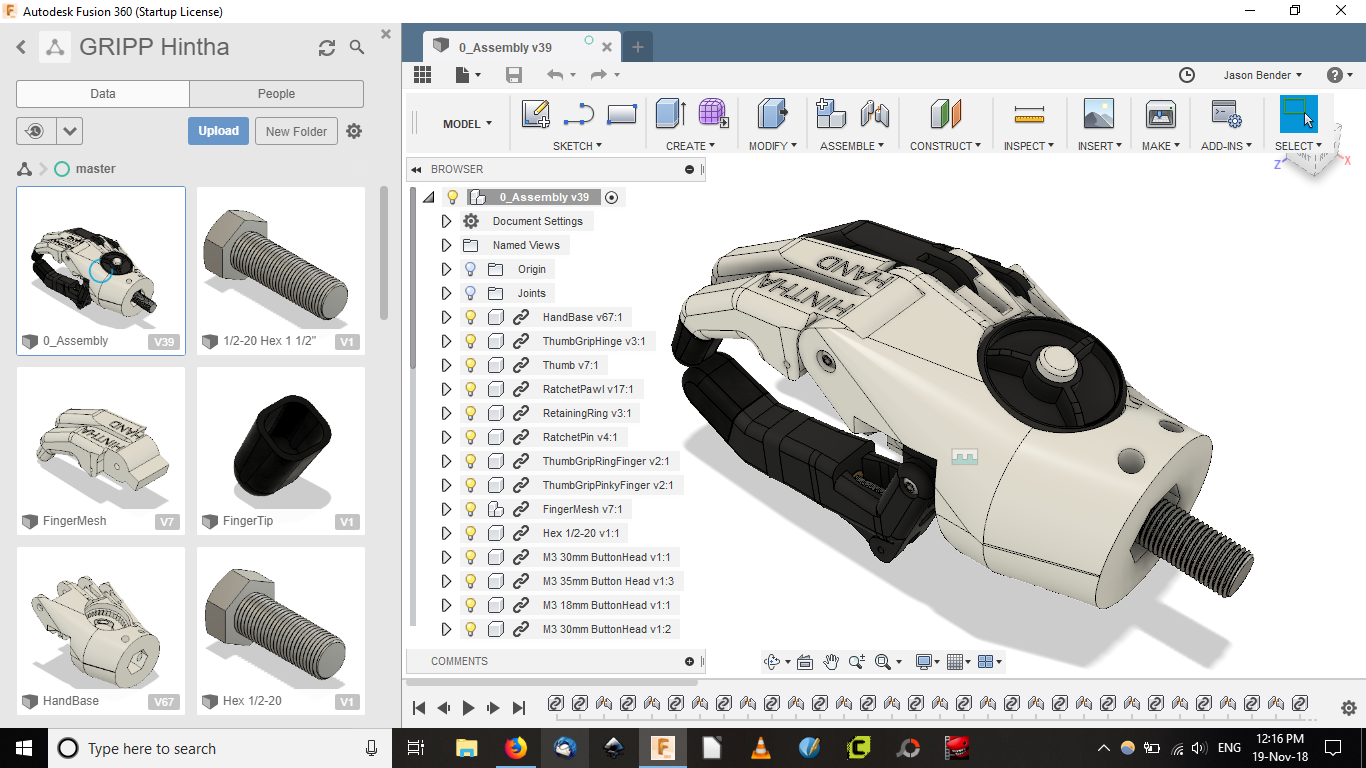
Here is the test setup:![]()
To be honest, I'm really happy with how it all went together and how it looks for only being the first major iteration. I have been working in Autodesk Fusion360 (5 stars, would recommend) which allowed me to test a lot of the mates and motion ahead of time, which seems to have really paid off.
I would also be amiss if I didn't give credit to Fricis Pirtnieks, whose open-source TuuTree hand design formed the basis for some of the parts and general sizing of the hand. Those familiar with his design can probably see more than a few similarities.
The goal is to keep the current 'mechanical' asthetic for design simplicity until all the functional kinks are worked out, then cleaning up the .STLs in Blender or similar program for a more natural cosmetic final appearance.
That's all for this update. Hopefully some test videos over the weekend. Stay tuned.
Jason![]()
-
First Prototype Video
11/12/2018 at 08:10 • 0 comments12 NOV 2018 // JASON BENDER // TAUNGGYI, MYANMAR
Prototype video is now live. You can view it here:
Hopefully will take some time this week to break down the various parts and discuss what I like and didn't like and what changes will be made to the next version.
As an aside, I realized in filming the video how easy and tempting it is to hide design flaws and "oversell" a product. I think this happens a lot in particular with 3D-printing related projects, and probably one (of many) reasons Hackaday, YouTube, and Kickstarter are a graveyard of exciting prototypes that never made into final products. In my case, if I'm honest, the ratchet system is pretty "gimicky" right now, but I think I know what to do to get it functioning the way I like it. But that doesn't really come across in the video.
Two takeaways:
1. There is a lot that YouTube videos can hide or embellish
2. It is important to involve real users early and often to detect these types of shortcomings before it's too late.
That's all for now. Like I said, more breakdown coming, so hold tight for that. In the meantime, feel free to share your thoughts on your takeaways from the video. What do you like? What has you raising an eyebrow? What could be improved? Let me know. -
Prototype (Version 0.1) Review: Part 1--Thumb Opposition
11/15/2018 at 07:05 • 0 commentsJASON BENDER // 15 Nov, 2018 // Taunggyi, Myanmar
Today begins the breakdown & review of the first "alpha" version (what I'm calling v0.1) of the hand, to determine what changes need to be made to achieve the stated design goals.
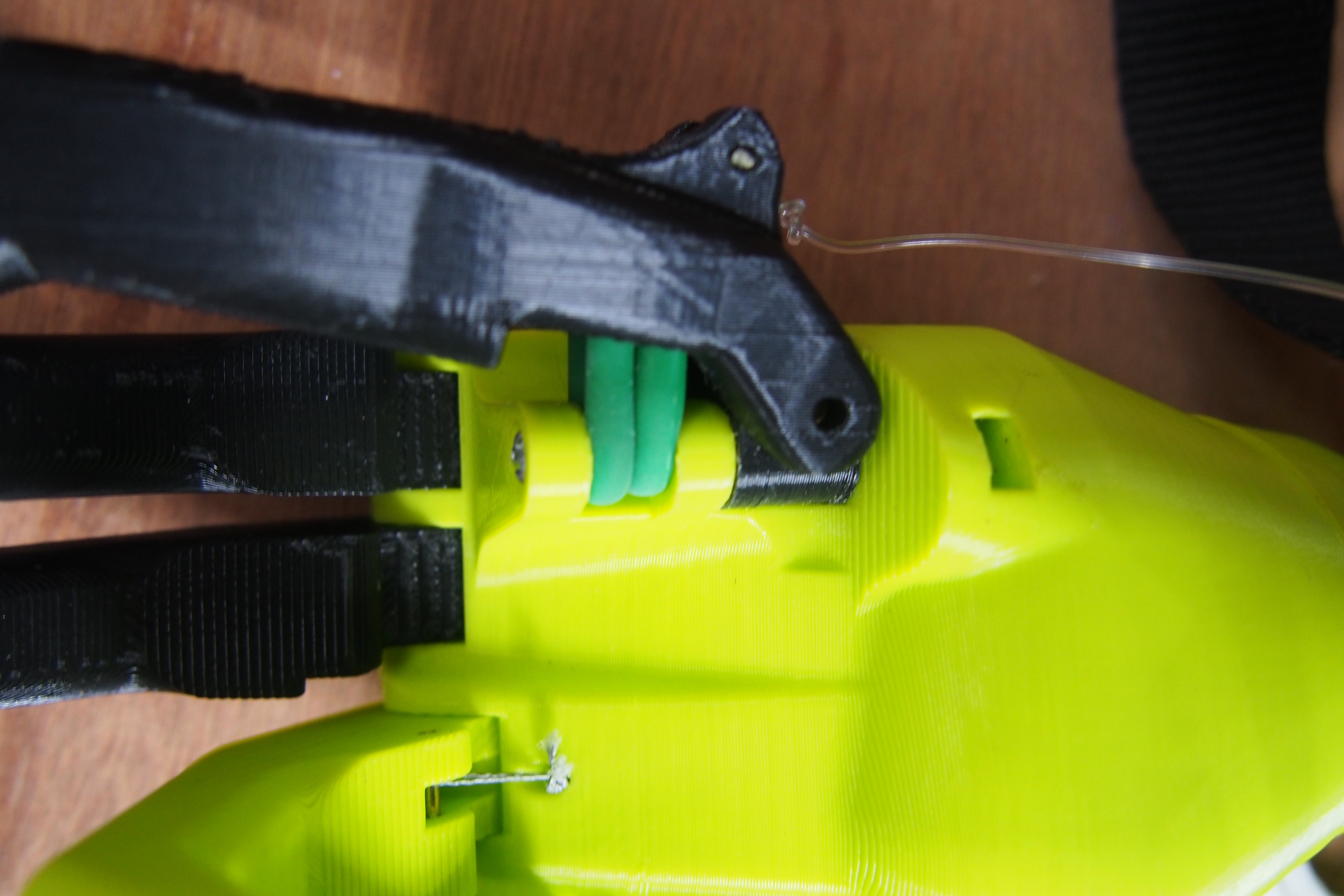
Today we begin with the thumb opposition system:![]()
Close-up of the thumb mechanism The thumb opposition mechanics are a critical part of the design, as it provides the ability to achieve multiple grip patterns. However, the actual implementation is quite simple. The rubber bands that provide the pinch force loop around the M3 bolt that acts as the pivot for the opposition motion. In this way, the length of the rubber bands is not changed as the thumb is rotated.
![]()
Thumb in externally rotated (lateral grasp) position The mechanism as designed works quite well, as shown in the prototype testing video. The thumb was able to be operated between 0-90 degrees of opposition, and the motion was smooth throughout.
However, there are a few difficulties with the current design that need to be addressed:
1. The opposition motion needs more resistance to better hold the thumb in place during grasping motion. In order to address this, the size of the thumb pivot piece will be slightly increased to provide a tighter interference fit with the hand.
2. The pivot screw at the base of the thumb where it connects to the thumb pivot piece is currently fastened by threading into an undersized 3d printed hole. While this works well for initial assembly, it is very prone to cross-threading and makes further disassembly and reassembly difficult. To address this issue, a nut trap or heat-set insert will be used to provide greater longevity (and will apply to all other locations in the hand where threading into 3d printed holes is being used). A slight bump up in weight and cost here, but the gains in adjust-ability/repair-ability seem worth the very small negatives.
3. It is really difficult to assemble the rubber bands. Holding them in a stretched position so the bolts can be fed through is a frustrating procedure. To address this, an opening will be added to the underside of the thumb so that the rubber bands can be stretched and held in a position that makes inserting the bolts easier. Hard to explain, hopefully can demonstrate via video after the next version is printed out.4. Perhaps the biggest problem with the thumb design is that the current location of the thumb joint, while cosmetically appealing and anatomically similar to the human hand, is aligned such that when the thumb is externally rotated the full 90 degrees , it doesn't quite line up with the tip of the 2nd digit for a lateral (key) grip, as shown below:
![]()
Thumb does not quite overlap with 2nd digit when in full opposition In order to counteract this, in this first design I allowed the 2nd and 3rd digits to be passively flexed (with high resistance) up to about 15 degrees, which gives enough overlap for a good lateral grip. However, that requires two motions to put the hand in the proper position, which, while manageable (as evidenced in the first video), is not an ideal long-term solution. There are two potential fixes:
1. Increasing the flexion and length of the index finger to better mate with the thumb during lateral grasp. While this would save any trouble of modifying the location of the thumb joint it is problematic due to: A) it changes the position for other grips, B) it reduces the maximum attainable opening size of the hand.
Therefore, the plan is:2. To move the location of the thumb joint dorsally (up towards the back of the palm) 10-12mm, so that the fingers line up during lateral grasp without needing any flexion from the 2nd digit. While this will increase the length of the thumb (a bit less cosmetic and perhaps slightly less durable) it will leave other major grips (power, 3-jaw chuck) unchanged, while also increasing the max opening of the hand. This should allow the hand to grab a larger variety of large objects, and reduce the amount of motions necessary to position the hand properly.
After these design changes are made, it will be time the next major mechanism in the review Part 2: the ratchet system for the 4th and 5th digits.In the mean time, let me know what you think of the thumb mechanism and any problems or possible improvements you might see.
Jason -
Prototype (Version 0.1) Review: Part 2--Ratchet System
11/19/2018 at 06:18 • 2 commentsToday I want to talk about the ratchet system that controls the 4th and 5th digits of the hand. The ratchet system is loosely based upon the commercial "Boa Closure" system that is commonly found in a variety of outdoor gear and, indeed, some traditional prosthetic devices.
The ratchet system is based on the Pocket Ratchet Wrench by Cleven, the most popular ratchet design on Thingiverse--which the addition of a "servo arm" type part which pulls on the cable, and a push-button release mechanism. This initial design fit together as a six-piece assembly in the back of the hand:
![]()
Parts that make up the v0.1 ratchet ![]()
Assembled together in a compact dial that fits in the back of the hand While the design worked well enough to show off in the prototype testing video, I was underwhelmed with its overall performance. First was the resultant precision available to the user. In the initial design, it only takes 5-6 "clicks" to move between fully open and fully closed, which made it very different to get precise finger positions or to clamp down effectively on items being grabbed. Secondly, the design tended to bind under high tension, making it difficult to release the tension on the fingers and the item being held.
In order to improve the design, the ratchet for v0.2 will be inverted, such that the ratchet gear is on the outside and the pawl is moved internal, allowing for a larger-tooth ratchet gear to be used--creating more "clicks" per degree which should improve the resolution:
![]()
Secondly, the radius of the "servo arm" or pulling arm will be significantly reduced, thus reducing the amount of cable pull per click (increasing precision) and reducing the amount of torque on the ratchet system, which will hopefully control the binding.
To be honest, the 3D-printed ratchet began as a placeholder for a commercial Boa-like device, but for the cost and function, I am interested to see if the 3D-printed version will be solid enough for the economical "standard" version, saving more robust commercial devices for the higher-cost "heavy-duty" version of the hand.
Version 0.2 is almost ready for printing, incorporating the new thumb joint location and improved ratchet design, along with a few small tweaks such as heat-set inserts and more simple design processes:
![]()
Hopefully much more coming soon!
Jason
-
Prototype Version 2 In Process
11/24/2018 at 07:12 • 0 comments24 Nov 2018 // Jason Bender // Taunggyi, Myanmar
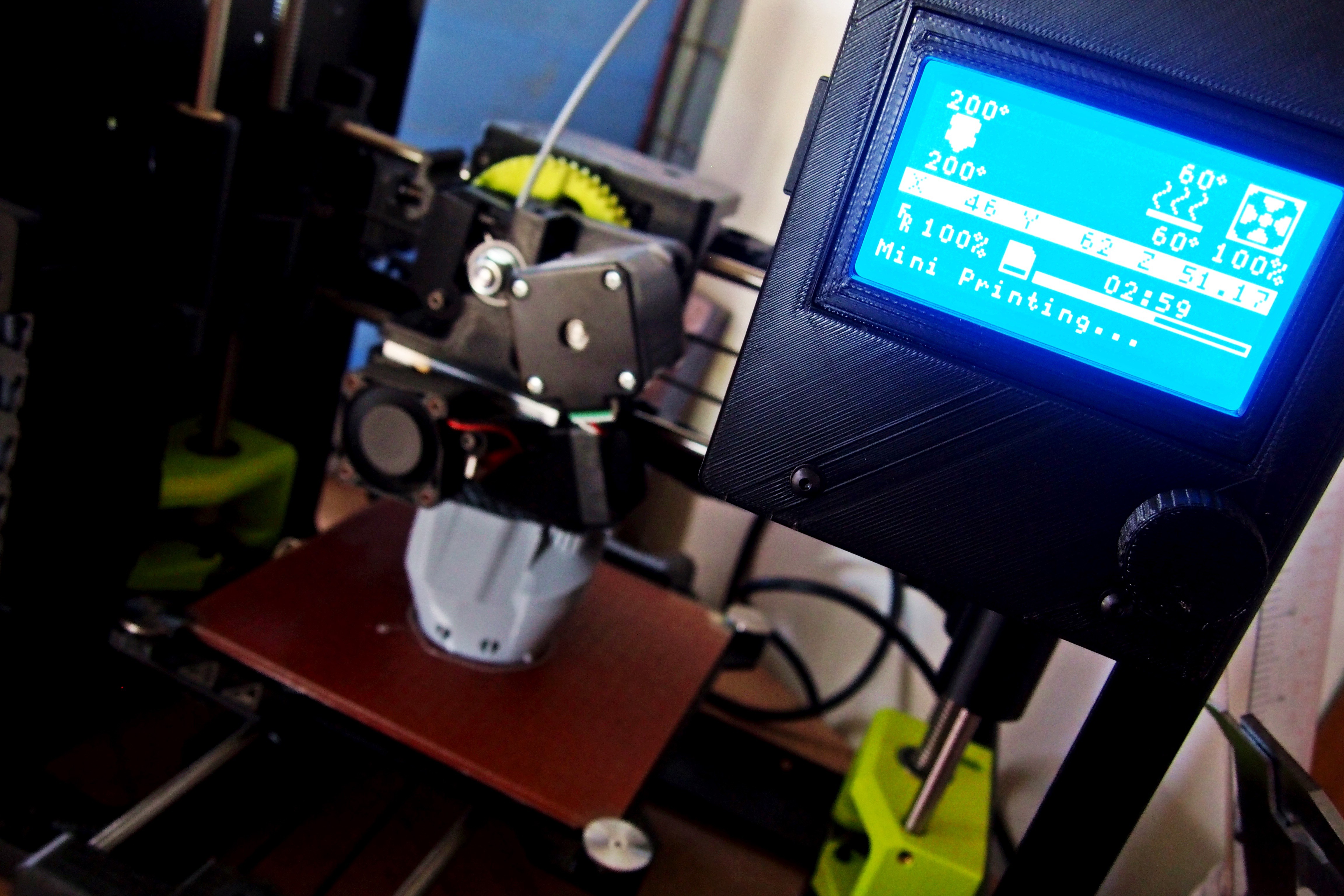
![]()
Printing for prototype version 2 (v0.2) is underway! Re-design of essential components also allowed for some better design processes within Fusion 360, which should help with ongoing development.
As it stands, the total print time for the prototype of the hand is looking like:
Palm / Base: 4.5hrs
Index + Middle Finger Mesh: 2hrs
Ring & Pinky Fingers: 1.75hrs
Thumb & Pivot: 1.75hrs
Ratchet Assembly: 2.25hrs
---------
TOTAL: 12.25hrs
This is with Polymaker PLA at 20% infill and 0.25mm layers on the Lulzbot Mini ('Standard' settings in Cura), except for the ratchet, which was printed at 0.18mm ('High Detail'). Obviously the final production devices will have increased infill and therefore longer times, but given the power situation in Myanmar, I was really happy with how I have been able to break it down into small manageable chunks such that power cuts do not become so disruptive.
There will be some delay in assembly as the addition of heat-set inserts means waiting for parts from the US, but hopefully can begin to refine the parts list, make an assembly chart, and being exploring ways to incorporate some metal reinforcement for the 'Heavy Duty' version during the down time.
Jason -
Mini-Update On The v2 Ratchet Design
12/15/2018 at 05:12 • 0 commentsJason Bender // 15 Dec 2018 // Taunggyi, Myanmar
As I wait for more hardware to arrive from abroad, wanted to update on some small design changes for the ratchet system:![]()
Animated exploded view of new ratchet assembly If you may remember, the original ratchet system included six printed parts, four screws, and a spring. By inverting the ratchet (so the gear is external and pawl is internal), having the gear teeth built-in to the body shape, and utilizing two snap-fits (instead of a retaining ring as originally planned for v2) in low-force areas, the part count is reduced to four printed parts and a spring. The re-design also allows for an increase of about 6mm in the overall diameter of the ratchet, which allows for a increased tooth count and hopefully will help larger hands manipulate the device.
I also realized during testing of the v1 prototype that the ratchet on a right-hand device should really rotate counter-clockwise to accommodate turning with the left hand, so I have also inverted the teeth and pawl to make that change.
Lastly,![]()
All the printed parts for the v2 prototype The parts for prototype v2 are printed and ready for assembly. As soon as the hardware arrives, it will be time for another round of testing!
That's all for now. More to come (hopefully) soon.
-
Prototype Version 2 Is Here!
01/11/2019 at 10:01 • 1 commentJason Bender // 11 Jan 2019 // Taunggyi, Myanmar
Version 2 is here! Check it out here:Major changes include:
- Reposition the thumb joint to increase opening, grip force, and most importantly, reduce change from 3-jaw chuck to lateral grip to a single motion.
- Updated ratchet that is allows for more fine adjustment, fewer parts, and easier assembly.
- Reinforced cable attachment point
Really pleased with this second-gen prototype. Fixes most of the major issues, and I dare say we may be just one final iteration away from a workable product. I was able to test the function by attaching the terminal device to a ITAL socket I had, and was nice to see that the standard 1/2-20 attachment means its easily interchangeable with a standard professional prosthetic device. The heat-set inserts are also a HUGE upgrade that helps with assembly and re-assembly.A few issues left to address:
1. The thumb is still too sloppy. When the hand is fully pronated there is no issue, but when the hand is in the neutral position and the thumb is in lateral grip (thumbs up) position, the cable tension is enough to pull the thumb into a more opposed position. Will try adding a gasket to increase friction, but ideally a type of indexing or locking mechanism is probably necessary for 3rd gen.
2. Rubber bands to retract 4th & 5th digits. Current prototype uses daughters hair bands, neither robust or strong enough for real function. Investigating dental bands and other small rubber bands for a more permanent replacement.
3. Gripping band swap. The "castration rings" work great for a prototype, but general consensus surrounding them is that longevity is an issue. Even after a few days of testing I can already tell they are loosening up. Latex tubing seems to be the replacement of choice. There is also an issue with:
4. The pivot bolt for the thumb that also anchors the rubber bands to the palm. The current screw is fully-threaded and tears at the bands, getting a partially-threaded screw (if possible) will help the bands slide when rotating thumb and reduce wear. A few other longer screws need replaced w/ hex-drive heads to standardize across entire hand.
5. Lastly, once the mechanics are nailed down, throwing the STLs into a mesh editor to smooth out the design and improve appearance.
That being said, I think we are really, really close, and it will soon be time to turn attention to the socket and suspension method. Stay tuned! And don't forget to leave a comment or request to join the team if you feel like you have something to add!Jason
Hintha Modular Prosthetic Hand
An affordable, durable, bespoke prosthetic hand system developed in and for low-income settings