Carl Bugeja
Carl Bugeja-
MKIII Final Test!
08/19/2019 at 17:24 • 0 commentsIn this video I went back to retest my PCB Robot! I upgraded the firmware to controller it over Bluetooth, added a new LiPo and tested how the weight and position of the battery effected the locomotion of the robot.
-
2-Legged PCB Robot?
03/09/2019 at 09:46 • 0 commentsAfter my last test I conclude that to make the robot go faster, I need to use a higher current rated battery to pump more current into the coils, or use a lighter one to.
But what if I reduce that weight by cutting off two legs? And that's what I tested. By doing this the robot was no longer omni-directional, but this change immediately showed that the concept was working better. The magic happened after shifting the turning axes of the robot. Its not 100% balanced, from the video you can see that one of the legs is slightly shifting and not move straight. But it's now probably faster than a turtle :-)
I'm not going to abandon the 4-legged PCB Robot design just yet. I still looking and get quotes from different manufactures on different lipo batteries. Once I receive the battery I will test the robot again and maybe even add a similar pivot to see what happens. In the meantime, I I can also start playing around the the modules Bluetooth stack!
-
MKIII Testing
02/24/2019 at 06:18 • 1 commentThe PCB Robot is finally crawling around! I document all the progress in this video
-
New PCBs!
02/03/2019 at 21:08 • 0 commentsThe new PCBs have just arrived! Thank you PCBway for sponsoring this project!
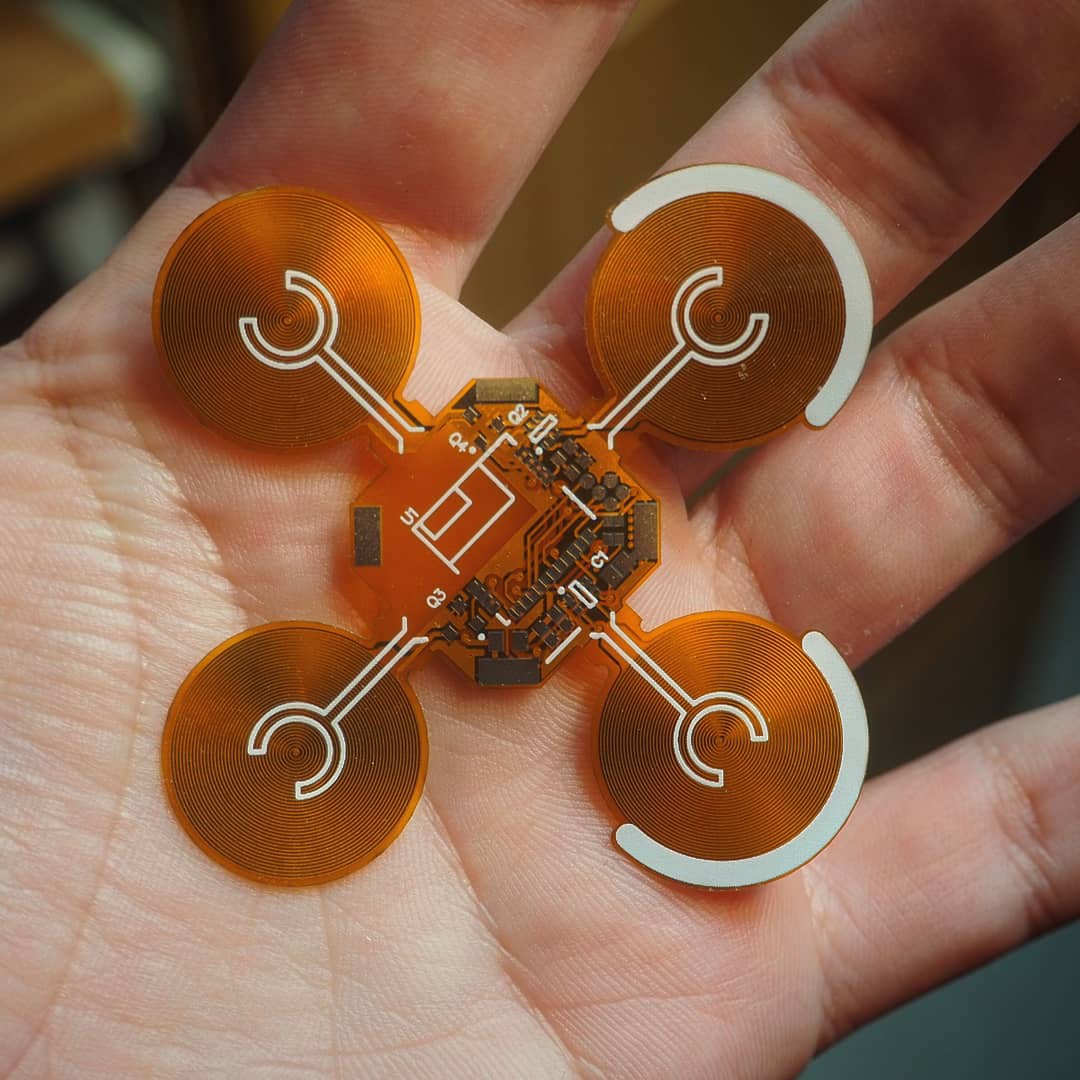
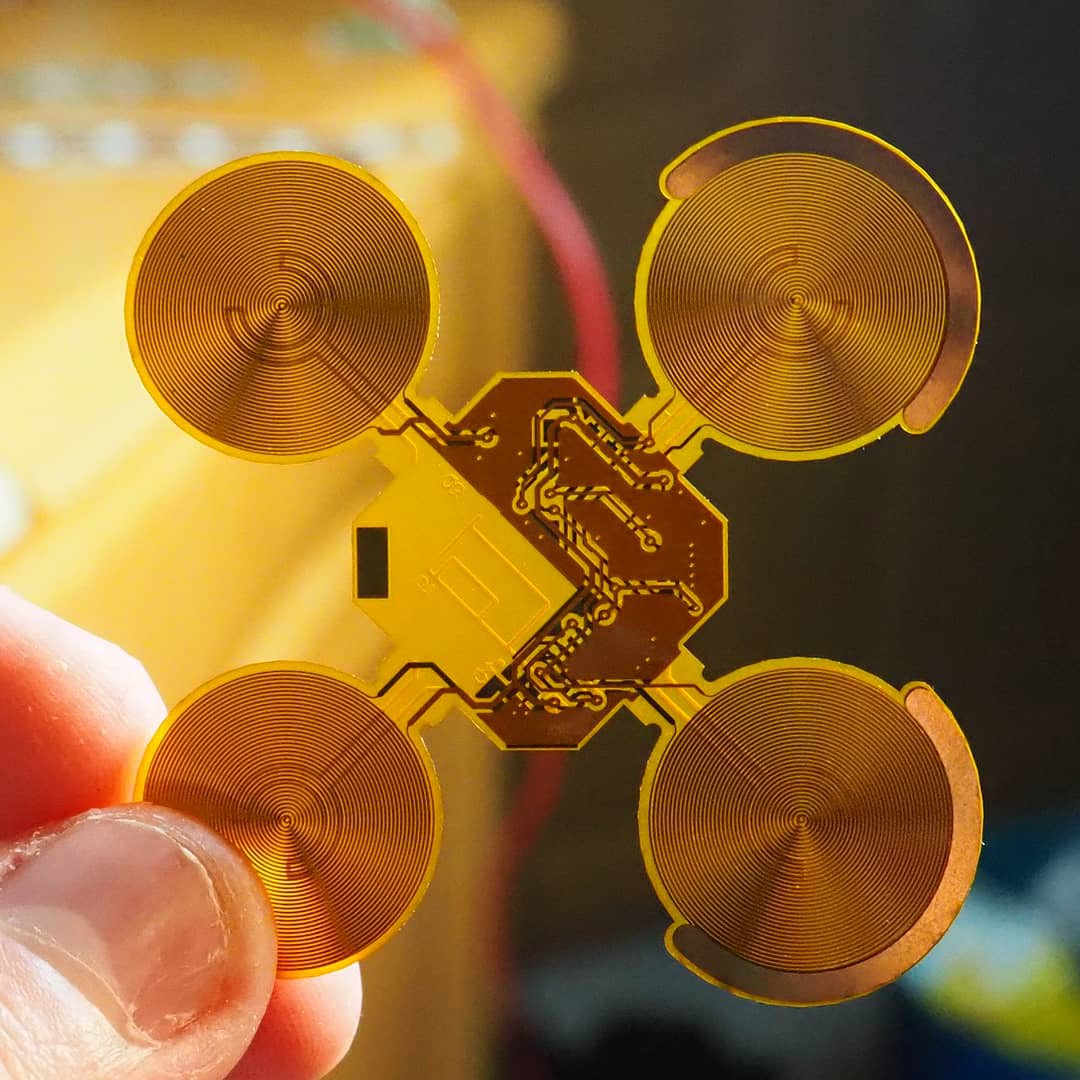
The flexible PCB is going to act as both the brain and the muscle of my PCB Robot
![]()
![]()
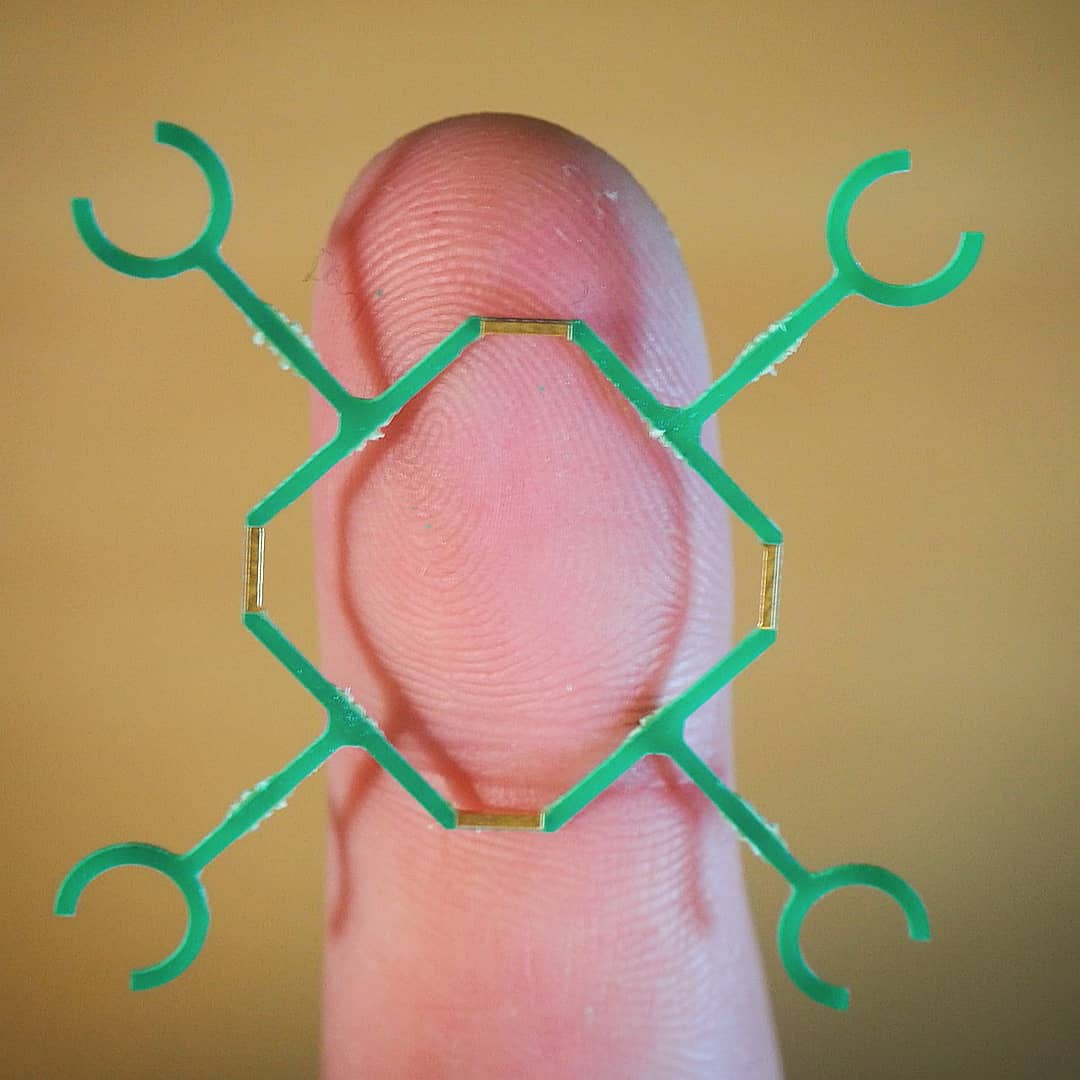
The rigid FR4 PCB is the frame that's going to prevent the middle part (were the electronics is going to be soldered) from bending and also hold the 4 magnets. Hats off to PCBway for pulling this off! The pcb is 0.6mm thick and it's width is just 1mm! So the milling machine had a very difficult task but they still managed to do it :D
![]()
-
MKIII - Design
01/20/2019 at 22:44 • 0 commentsIn this new video, I explain how I designed my four-legged PCB Robot MKIII, having a BLE module and a simple circuit for driving the coils and charging them!
-
Walking Circuits
12/09/2018 at 22:17 • 4 commentsMKII test video!
Now that I have proofed that the idea can work out, I can start designing MKIII.
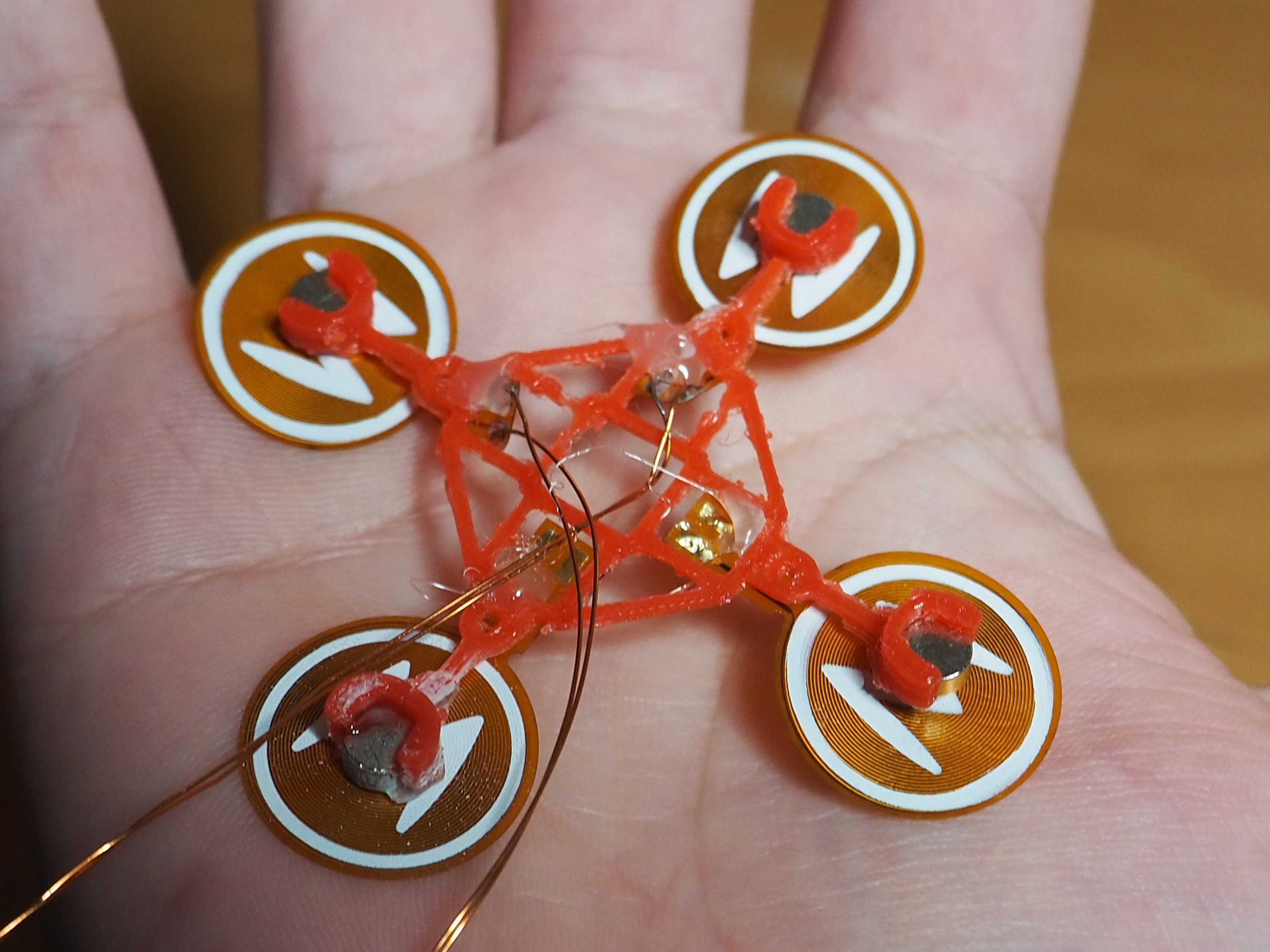
PCB Robot MKIII will be made from just a pcb, magnets and a battery. This cheap robot will be ideal for swarm robotics.
-
MKII
11/30/2018 at 22:08 • 0 commentsMy new light-weight design:
![]()
3 freakin' grams! (Yes I'm going to have a problem with the battery for MKIII but I have a plan)
![]()
-
Concept
11/29/2018 at 19:32 • 0 commentsThis was my first attempt in trying to use flexible PCBs as robot legs!
As shown in the video this prototype manged to make some small steps but I was expecting a better behavior. These are all the things that needs to be improved for MKII:
- Align the PCB so that all legs deliver the same amount of force - strongest point is the middle of the coil, if misaligned different forces with different angles are produced
- Reduce the gap between the PCBs and magnet
- Reduce weight