 Matthew Peverill
Matthew PeverillThis is my dream controller for Kerbal Space Program. It is a hobby project, and I am a PhD student, so expect slow progress.
My focus is on quality inputs. I don't expect to be able to fly with just the panel, and I'd rather be looking at the screen anyway (also I am already stretching my pin allotment).
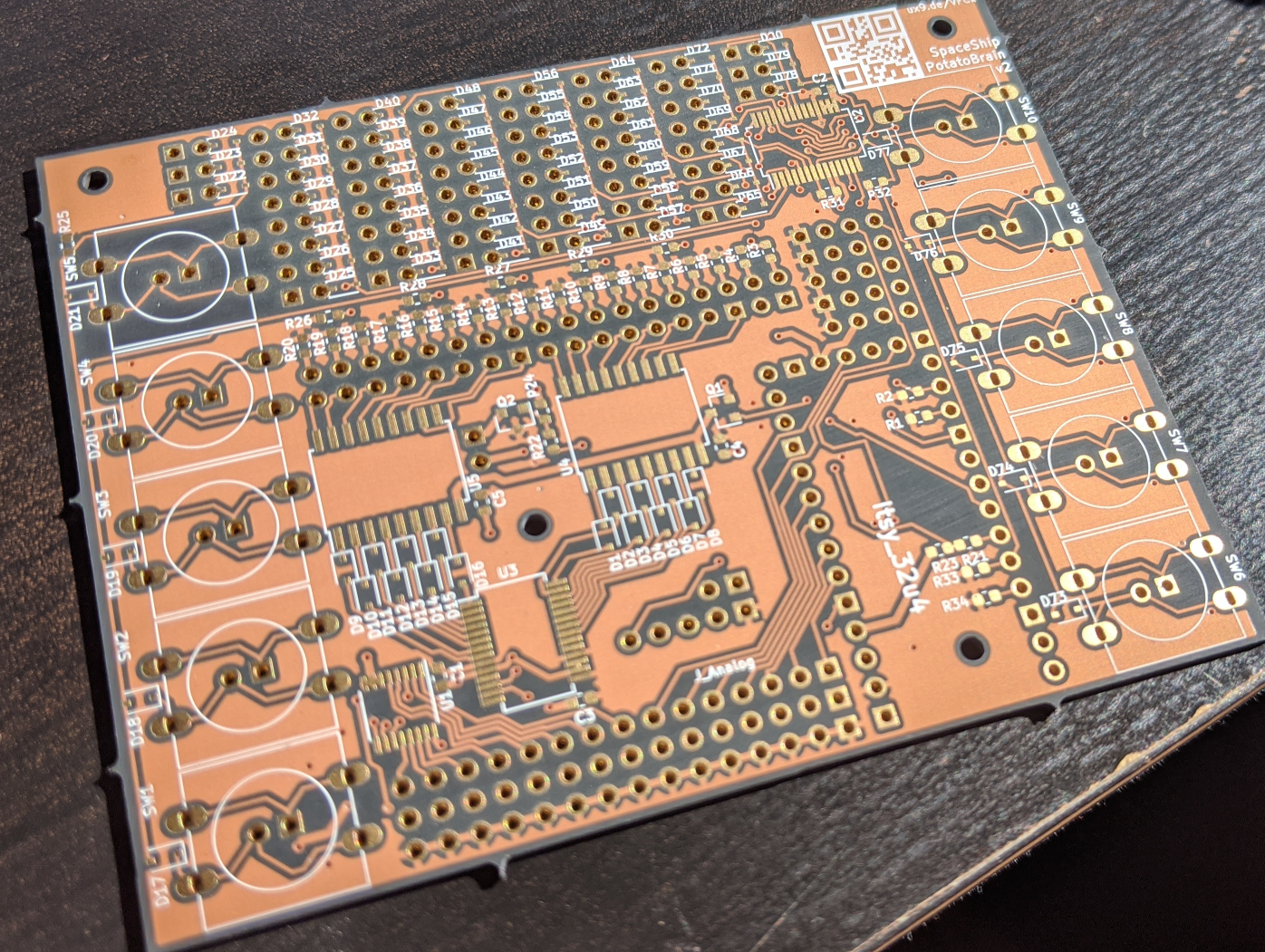
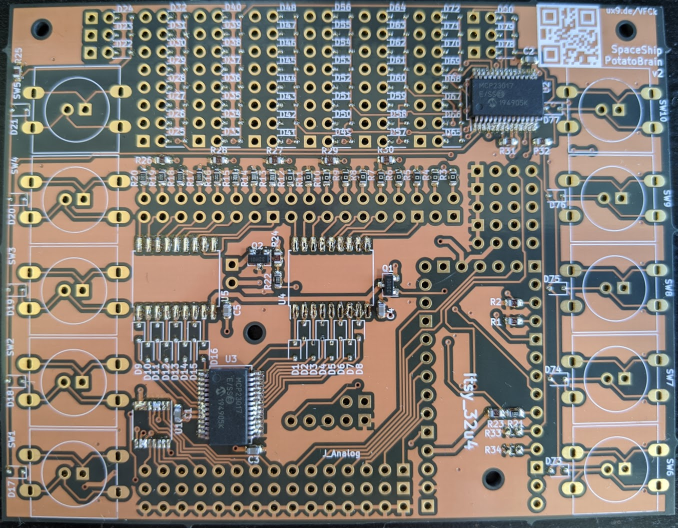
I've completed a few prototypes of graduated complexity while I got a feel for the design. I made a draft version of the elecronics, which had some flaws, and decided to re-do them using a smaller microcontroller (the adafruit Itsy 32u4) and a single board design. This should be the final version, and it's currently in development.
Code and electronics design both heavily based on https://github.com/PeteWasEre/Very-Kerbal-Kontroller-V2








 bveina
bveina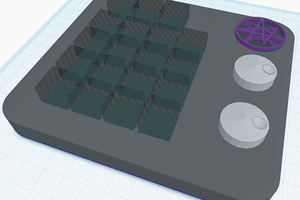
 mrpendent
mrpendent
 blinkingthing
blinkingthing
 KingOfKYA(Travis K. )
KingOfKYA(Travis K. )
This is fantastic!