 John
JohnI would have loved to have all auto-feeders, but that would increase the cost significantly. Especially since I don't have a 3d printer (I realize the Ender 3 is under $200 and could do the job, but one thing at a time).
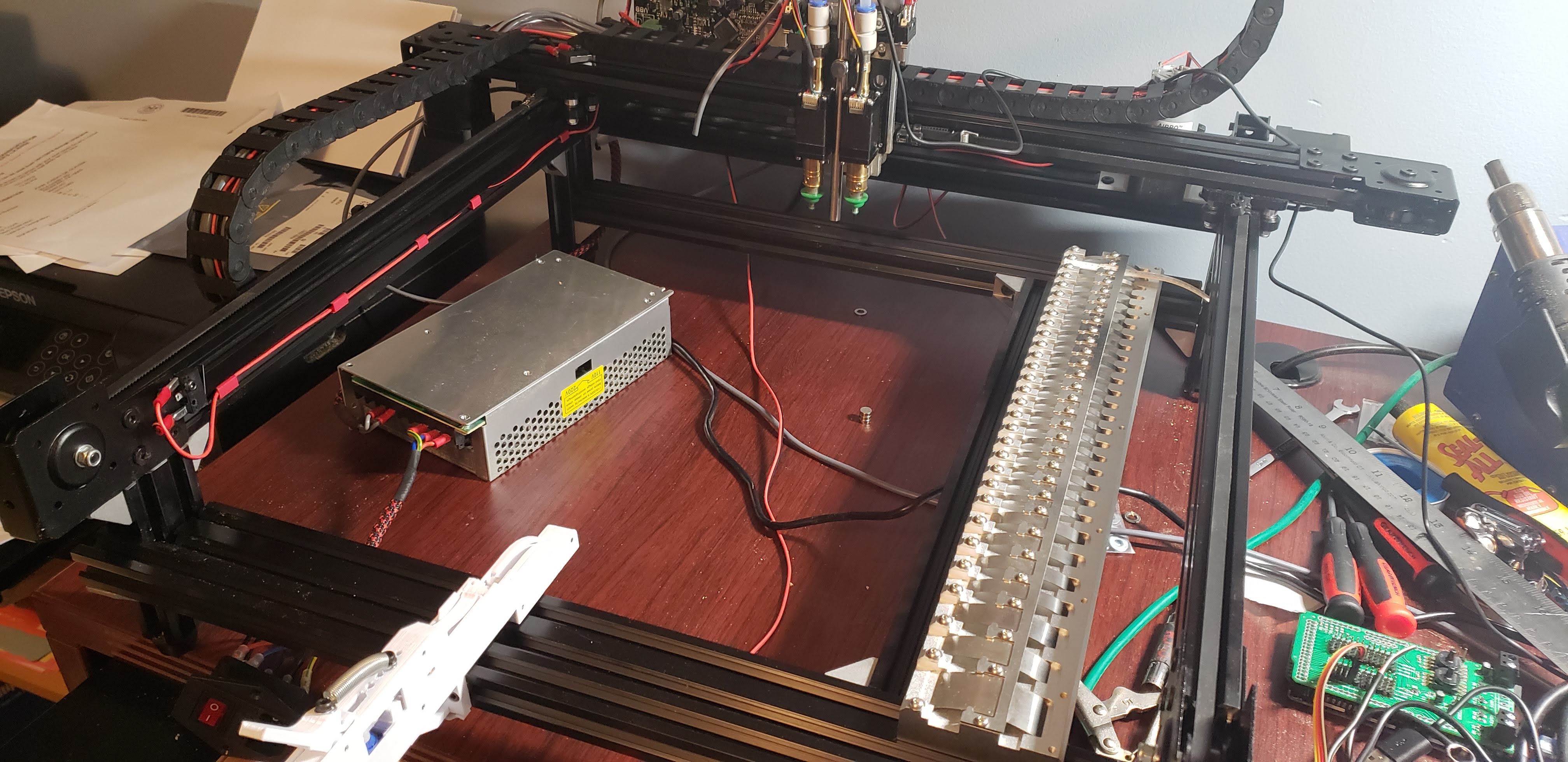
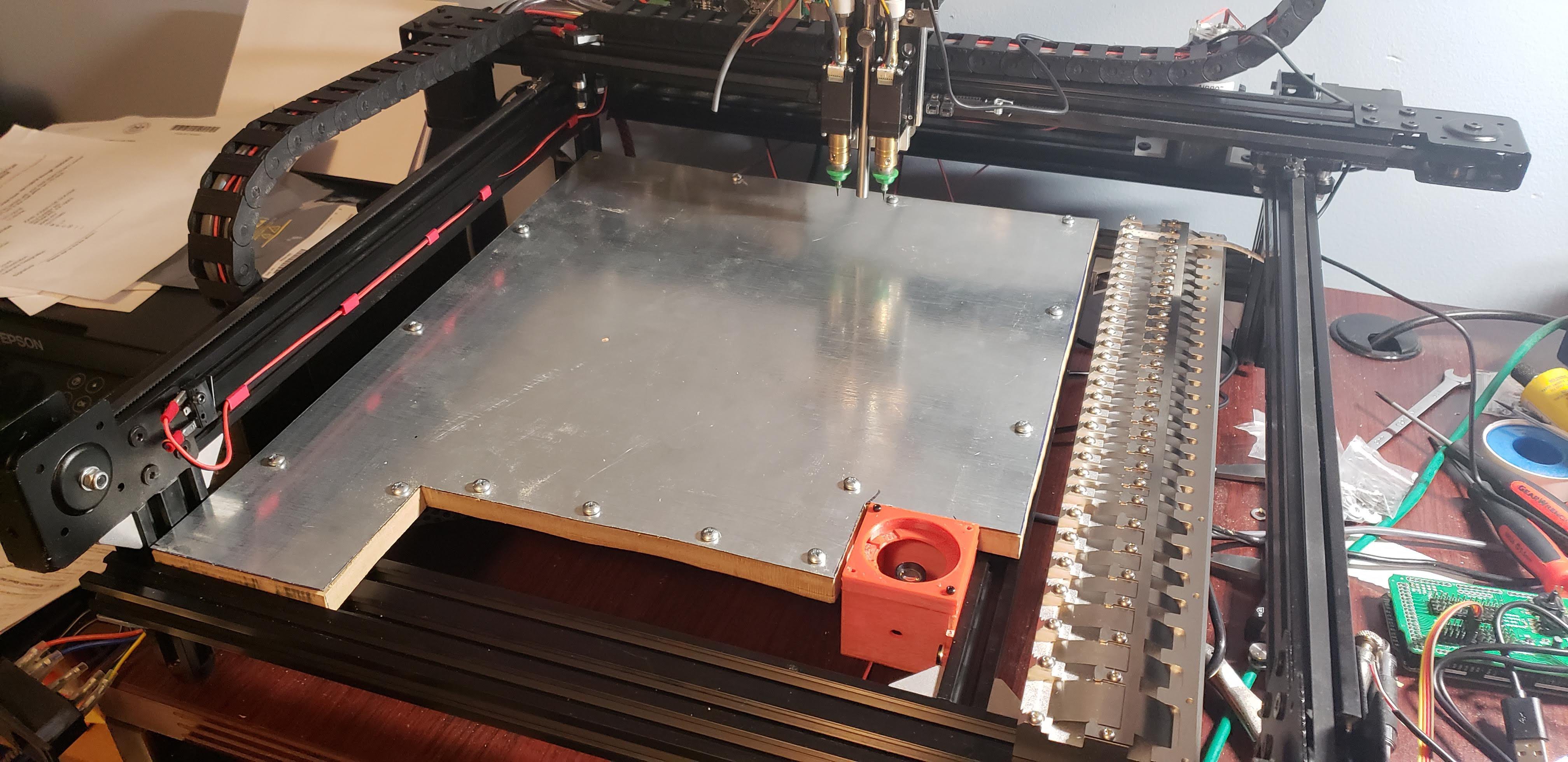
So, I found this metal drag feeder on Robotdigg. After getting it, I realized that it sat too high on the table for the nozzles to clear it. That meant, I would have to mount it to the frame directly and cut out space in the table.
I had already cut a space in the table for the auto feeders. They also needed to be raised a bit, but that was solved by mounting them to a 20x20 extrusion, that was then mounted to the legs.
Here is the drag feeder being positioned to mount to the frame. You can see how I ended up mounting the drag feeders as well. Note that the front and rear frame rails were moved to the legs from the initial spot under the pulley and motor mounts. This is because they were too high to mount the feeders to. This way I count mount the table to them as well.
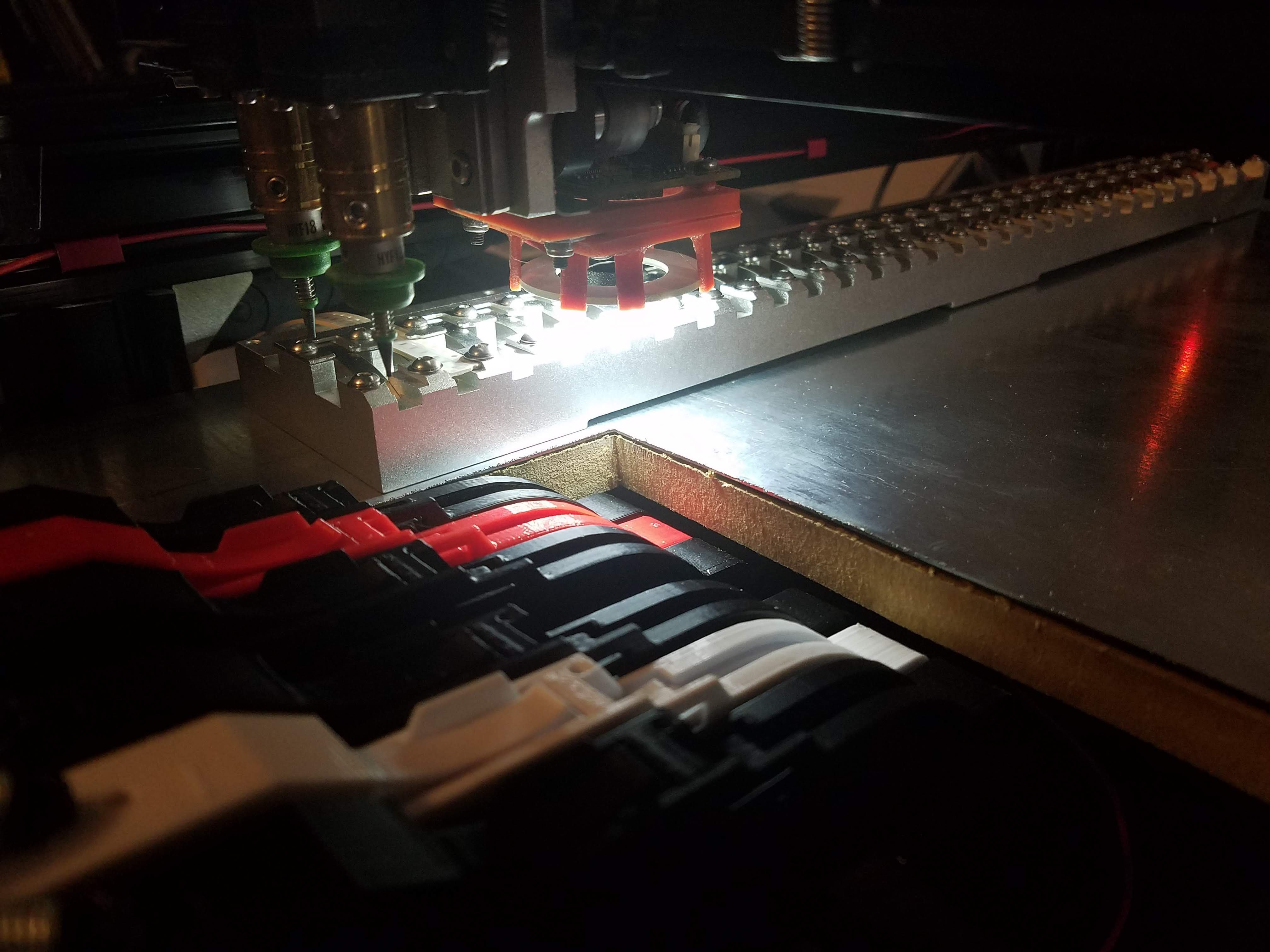
Here is the table cut (and the up camera mounted in the 3d printed case):
There was another issue though. With the top camera mounted to the back of the head, it wouldn't be able to "see" the auto-feeders. Since the auto-feeders do not need vision, this would have been okay, but it is nice to be able to see where things are on all parts of the usable space. That and it couldn't see anything for the second nozzle when it was over the drag feeder either.
The solution? A different camera mounted between the nema 8 motors. It's slightly lower quality than the ELP camera, but it works. The only downside is it loses focus - I have no idea why, but it can be adjusted easily on the top.
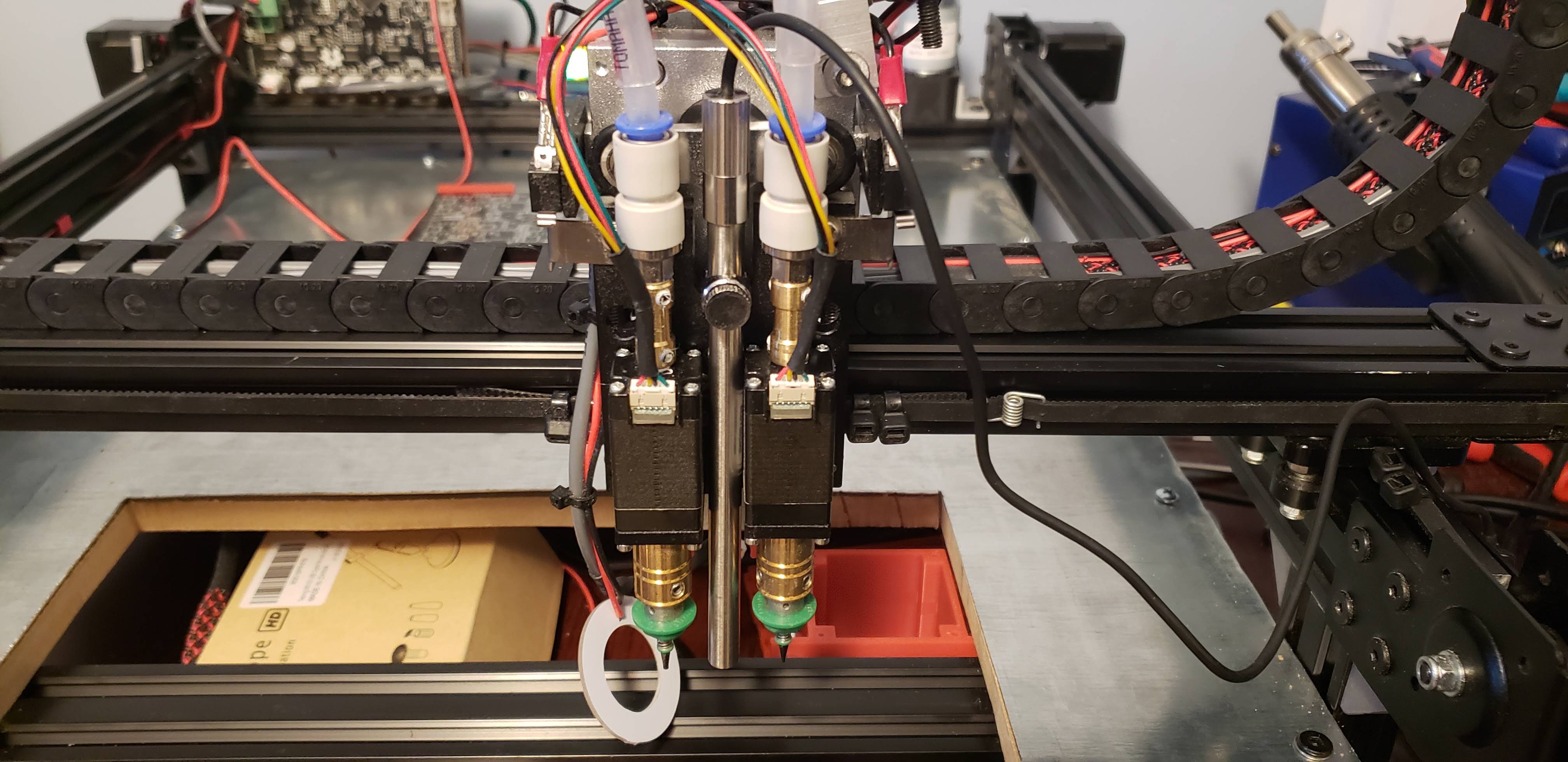
The mount originally had a ball on the end of it. That was cut off and run through an M5 die. It screwed perfectly into the head where a nylon stop was located. Two nuts on it and it was pretty sturdy. The thumb screw was later replaced with a set screw.

Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.