 John
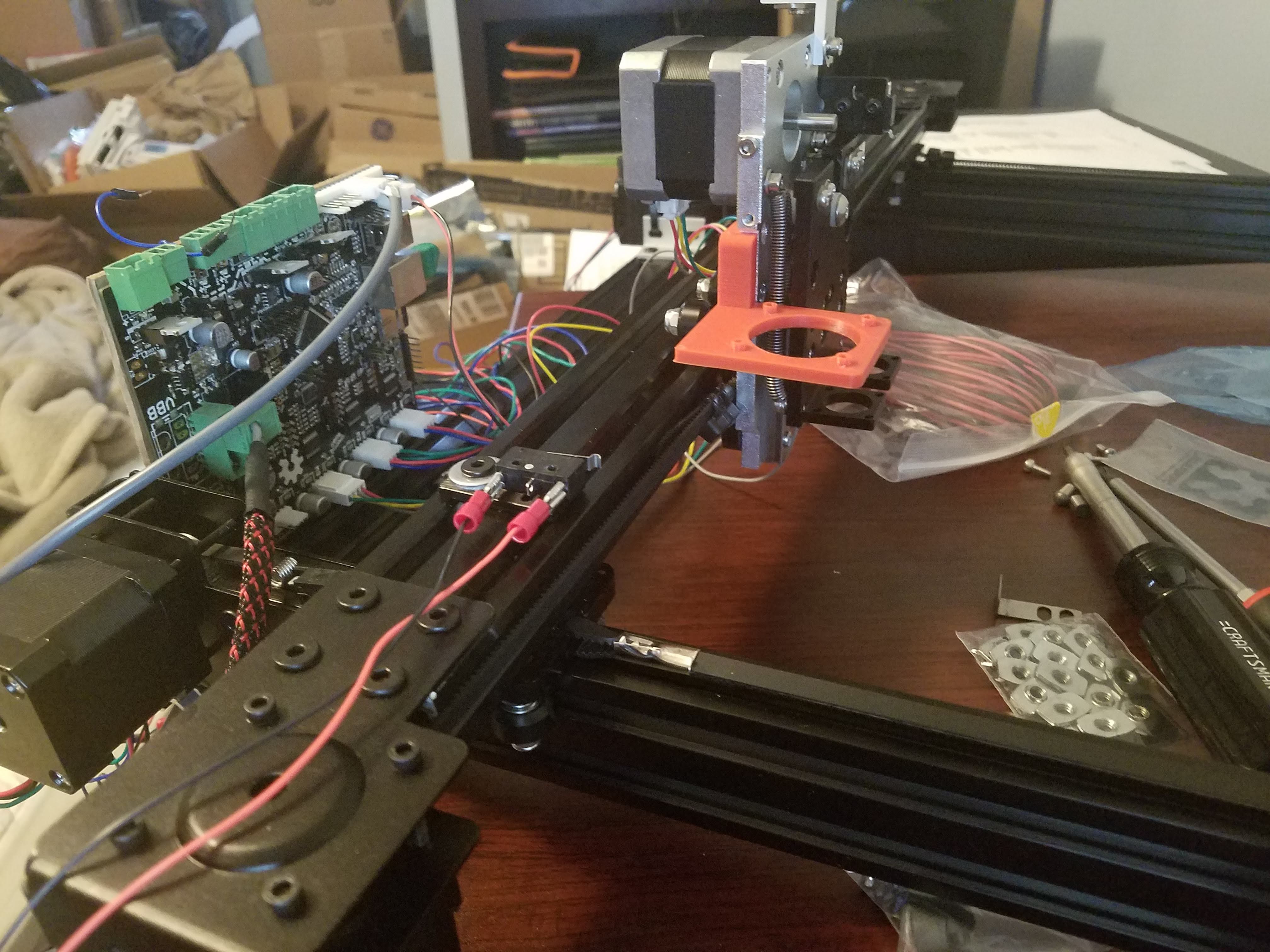
JohnStarting out the build with the Openbuilds frame and mounting the head. Note that the gantry plate threads have to be drilled out to mount the x axis like this. It's a bit tricky to get assembled.
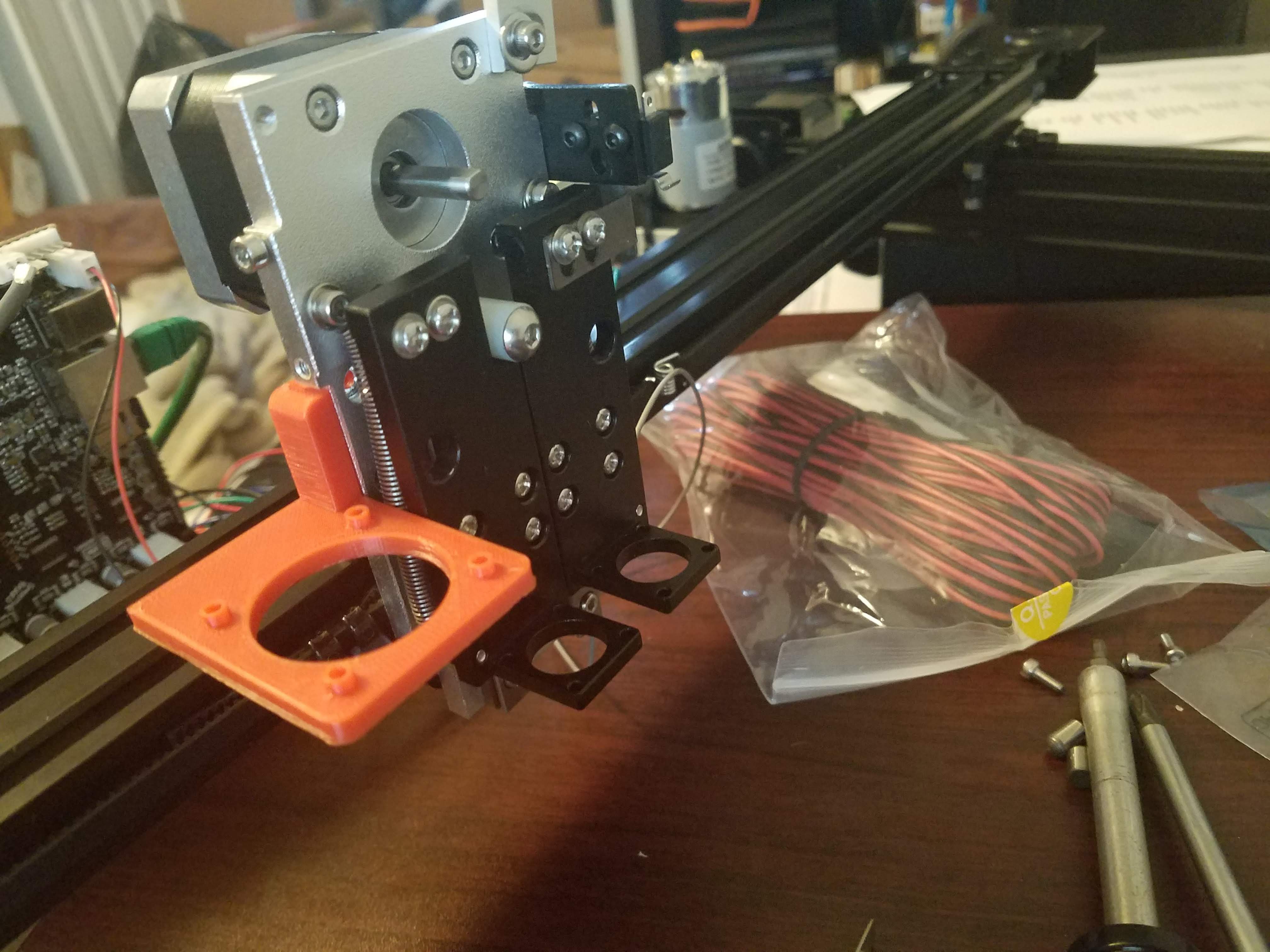
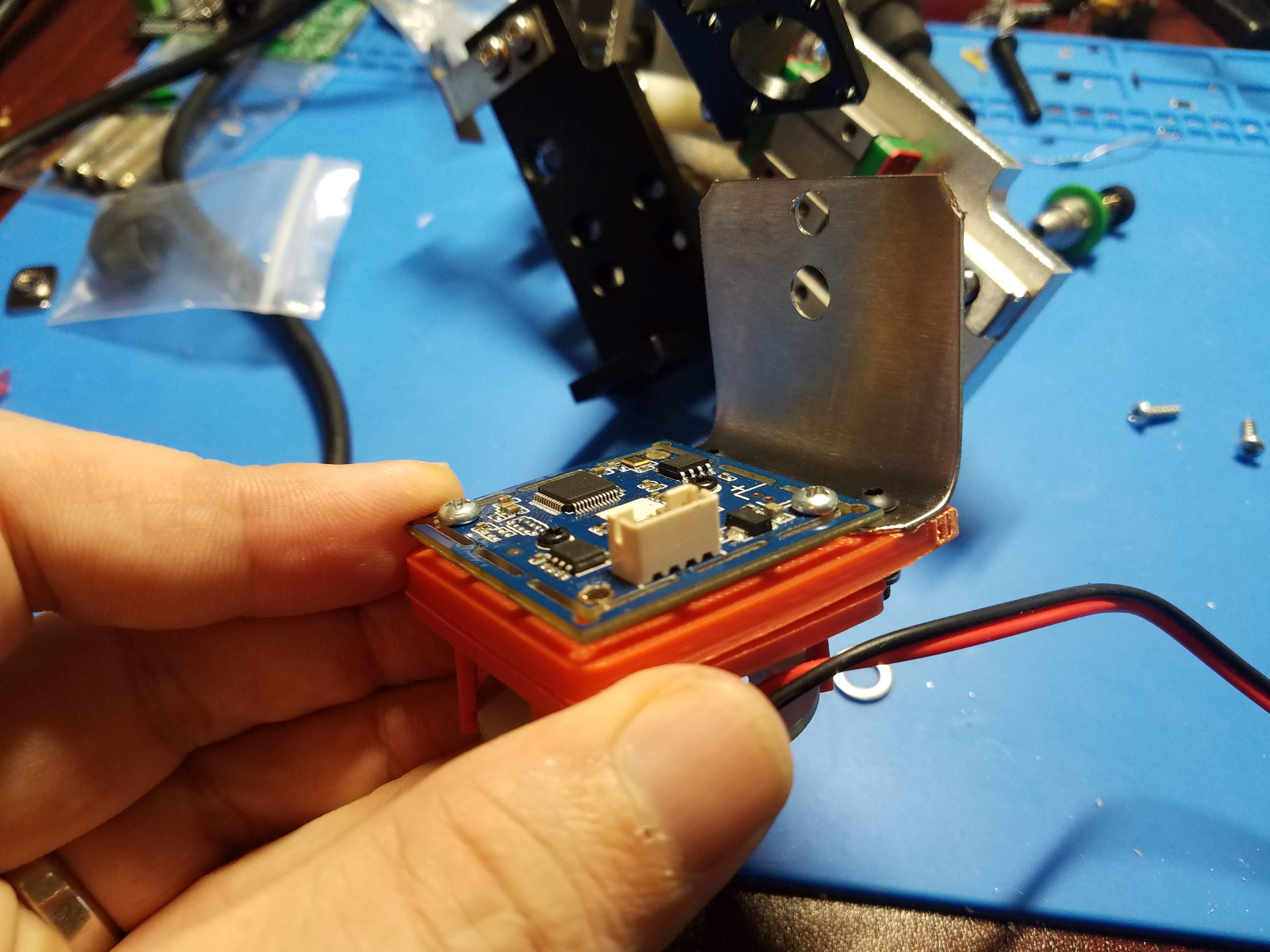
The 3d printed camera mount is from the OpenPnp design. It didn't work too well in this location on the head and was rubbing on the nozzle plate.
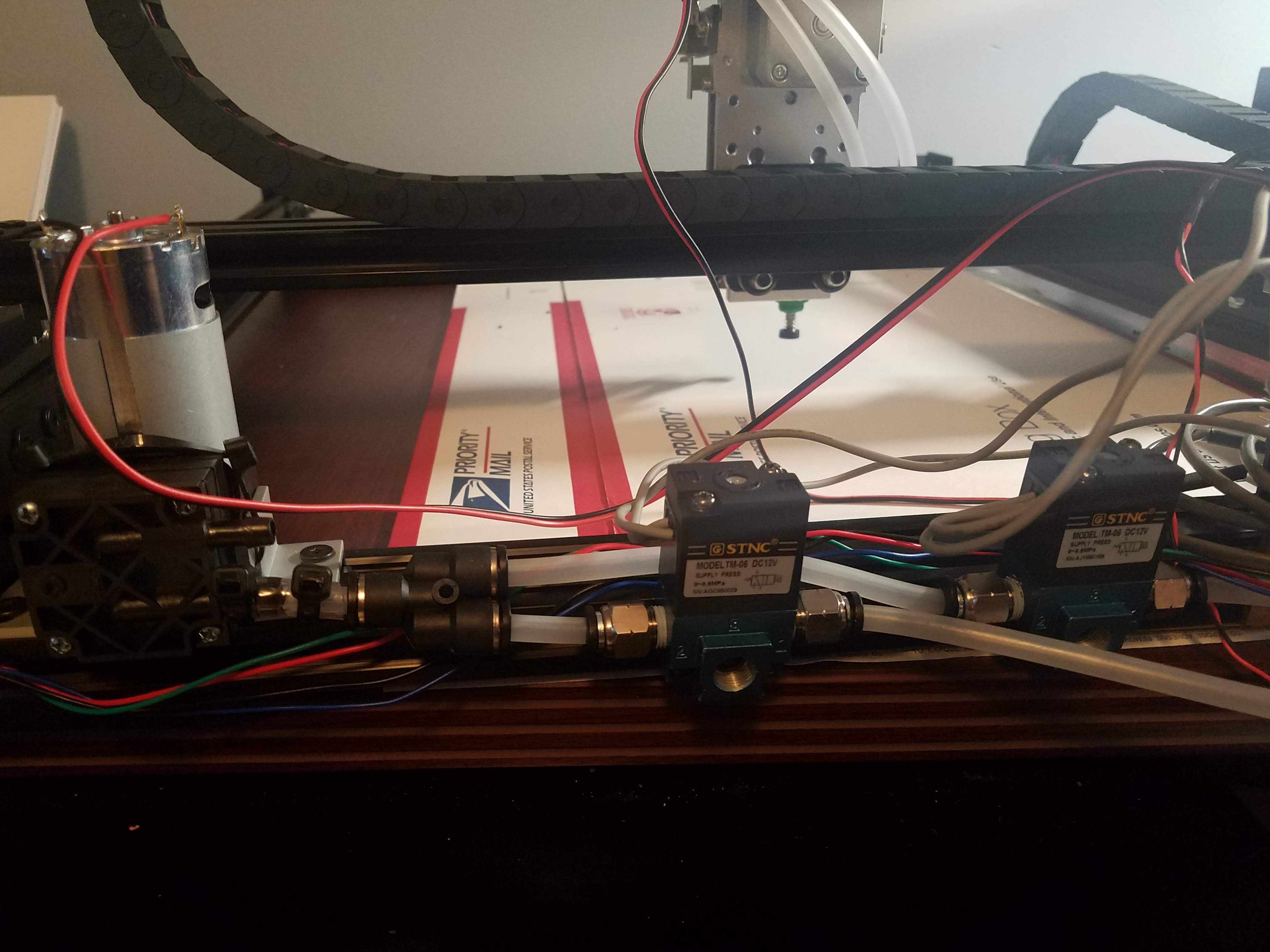
The solenoids and vac pump mounted. Flyback diodes were used at the connections for each.
I had to disassemble the head to drill out the mounting holes a bit more to mount to the OpenBuilds mini gantry. They were m3 sized and needed to be m5 and countersunk a bit to clear the nema 8 mount.
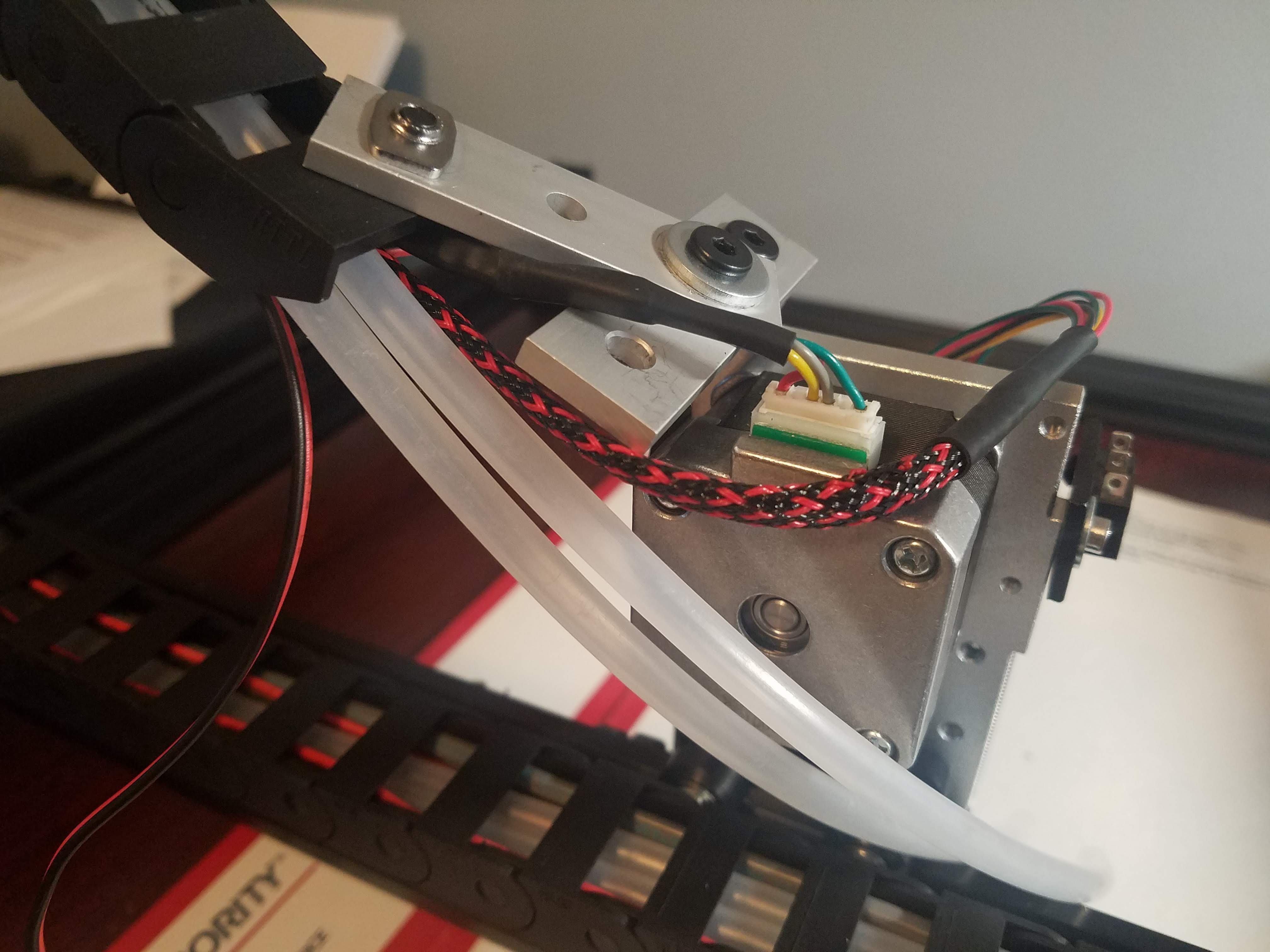
Running everything through the chain. I later realized that the tubing I used here was too rigid, so I switched it out for something softer just in the chain. The rest is still this tubing.
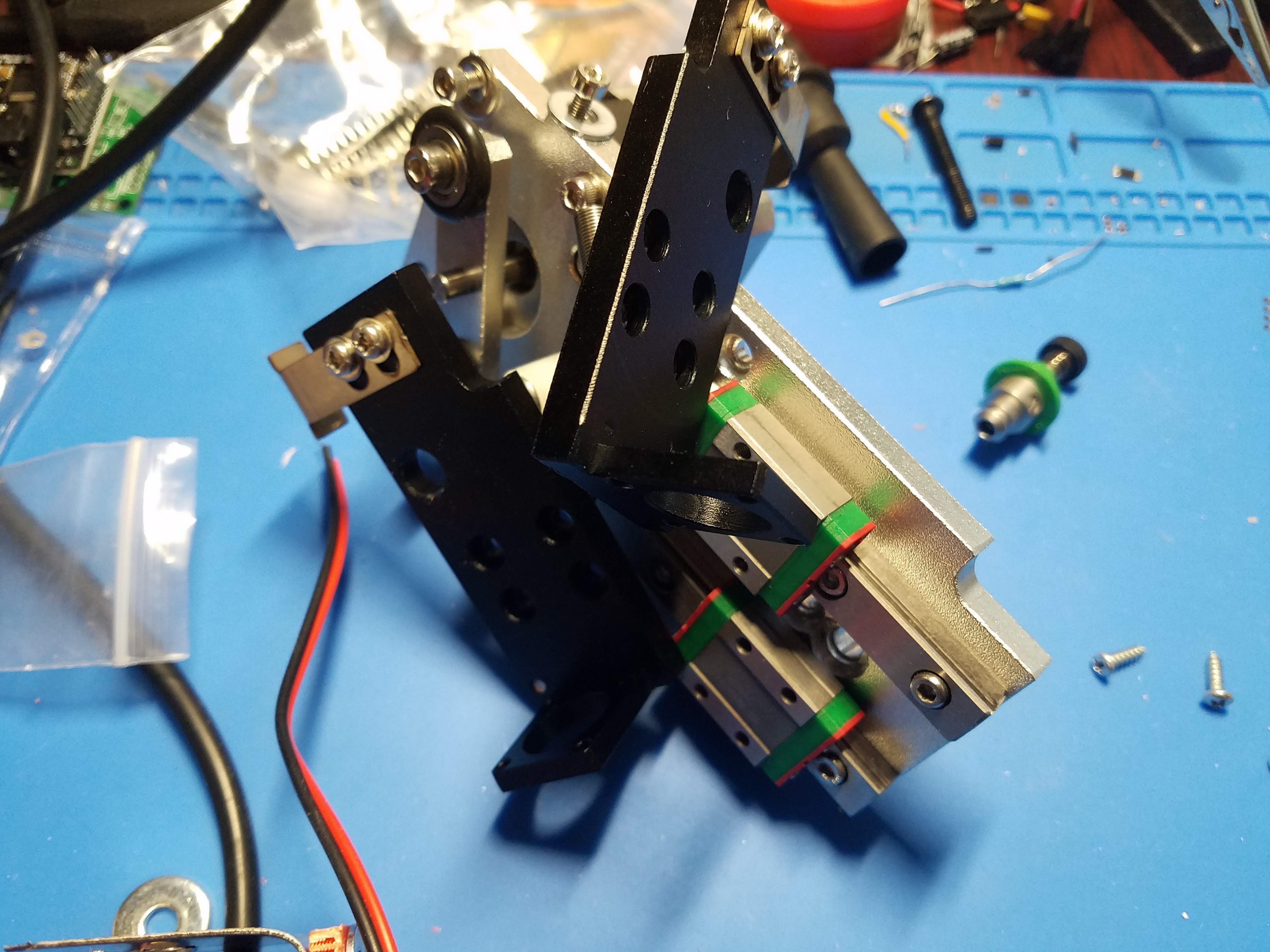
After figuring out that the camera wouldn't work next to the head, I mounted the (ELP) camera under the X axis. I later switched this out with another camera that fits between the Nema 8 motors on the head. I found that having the camera far away from the nozzles made the usable space less when the top camera needed to be used to align with the feeders.
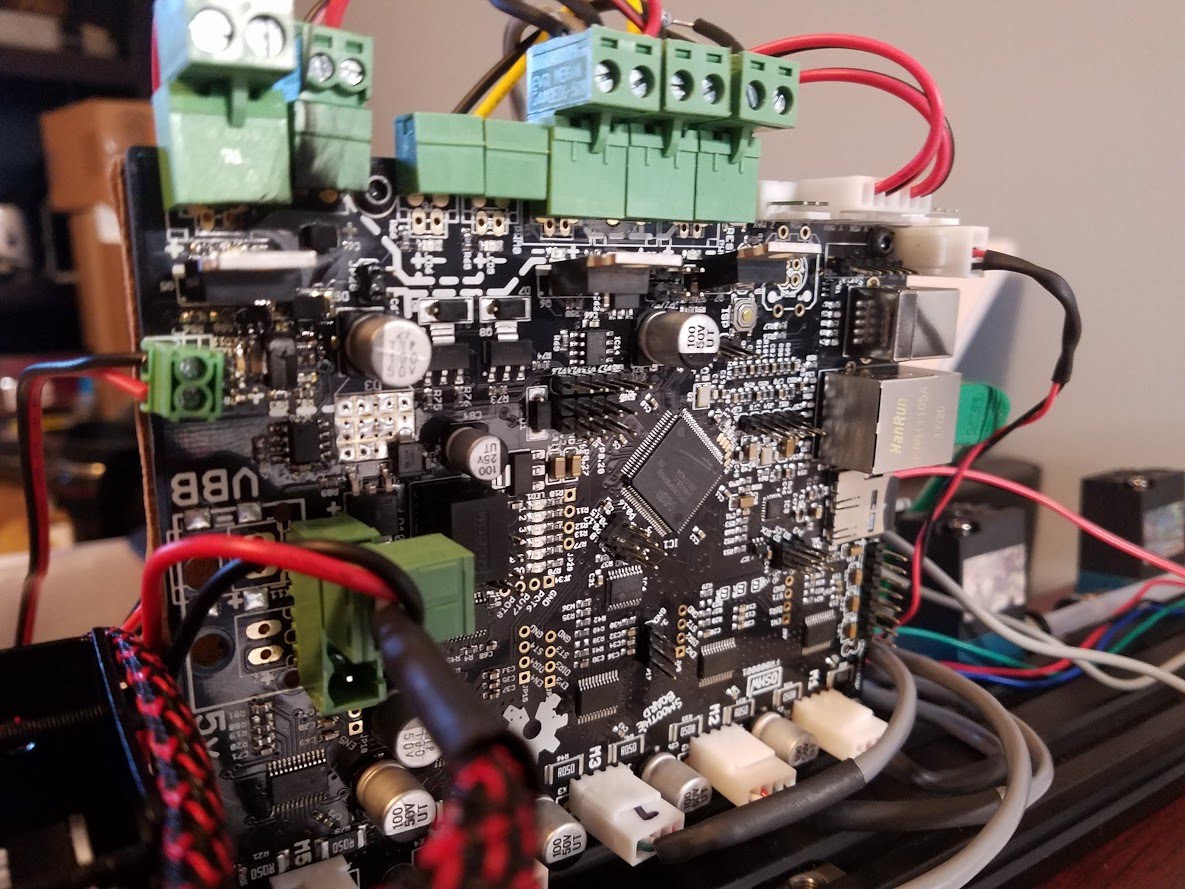
When originally purchased this was a 4x Smoothieboard. I purchased the parts to make it a 5x and soldered them on. The BOM for that is located here. In the top left you can see where I let out some magic smoke from a MOSFET due to some reversed polarity on the power input for the small MOSFETS. When I turned on the LED light, POOF! Whoops!
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.