 Yann Guidon / YGDES
Yann Guidon / YGDESSo one day my neighbour comes and asks for help. Why not ?
Imagine you play chess against your opponent. Sometimes one of your pieces falls into a trap that opens suddenly as you press the button of the timer.
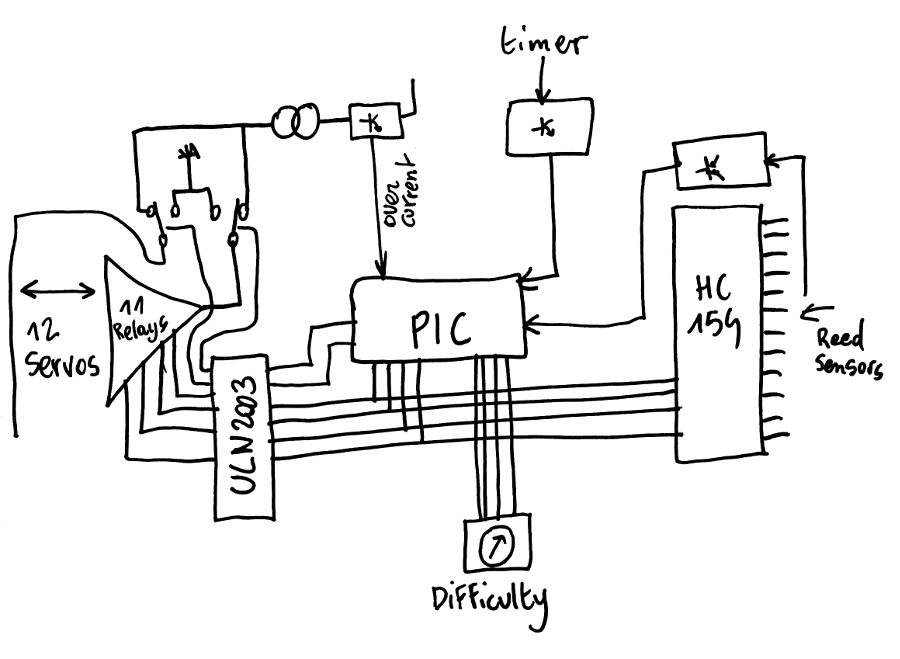
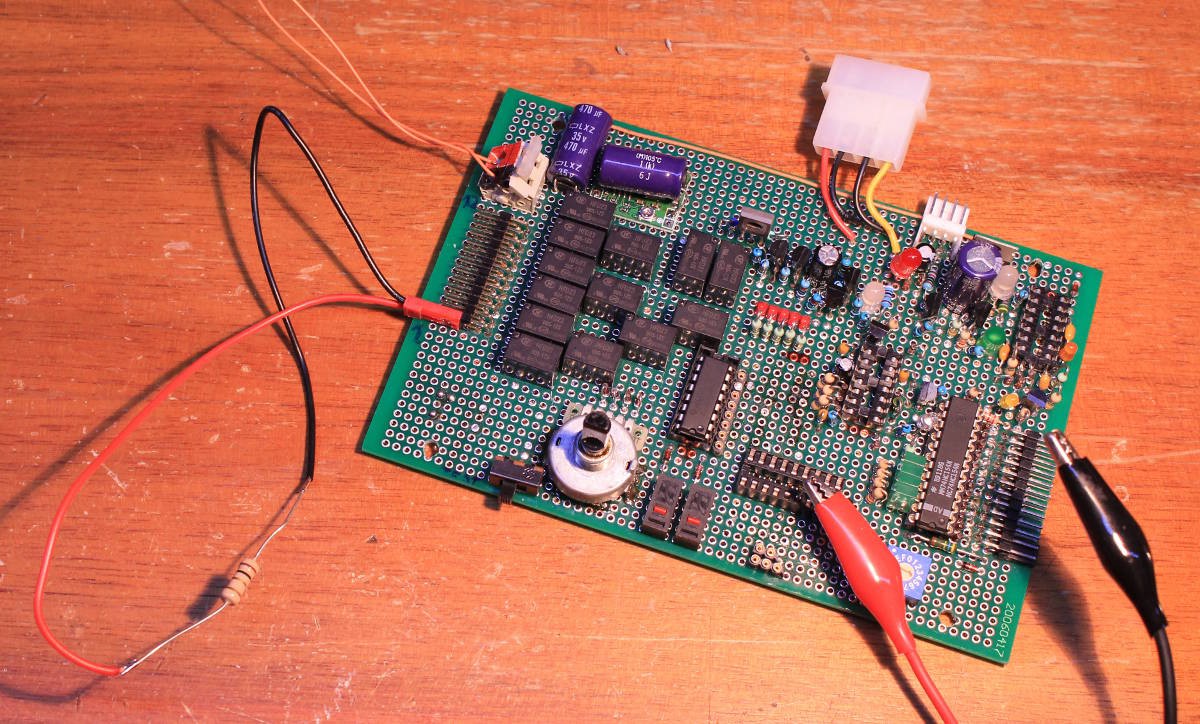
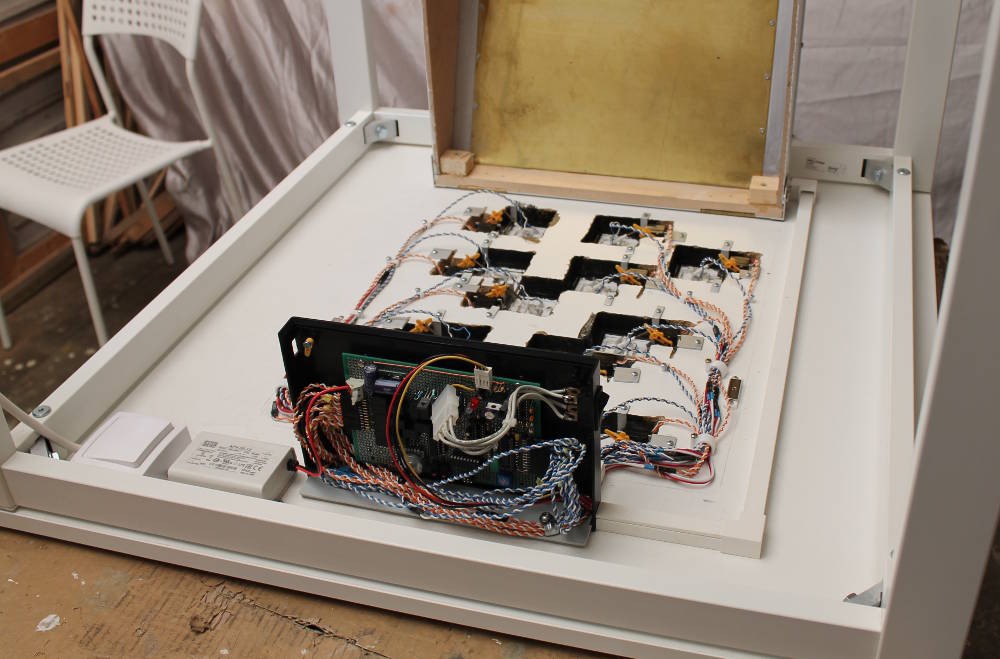
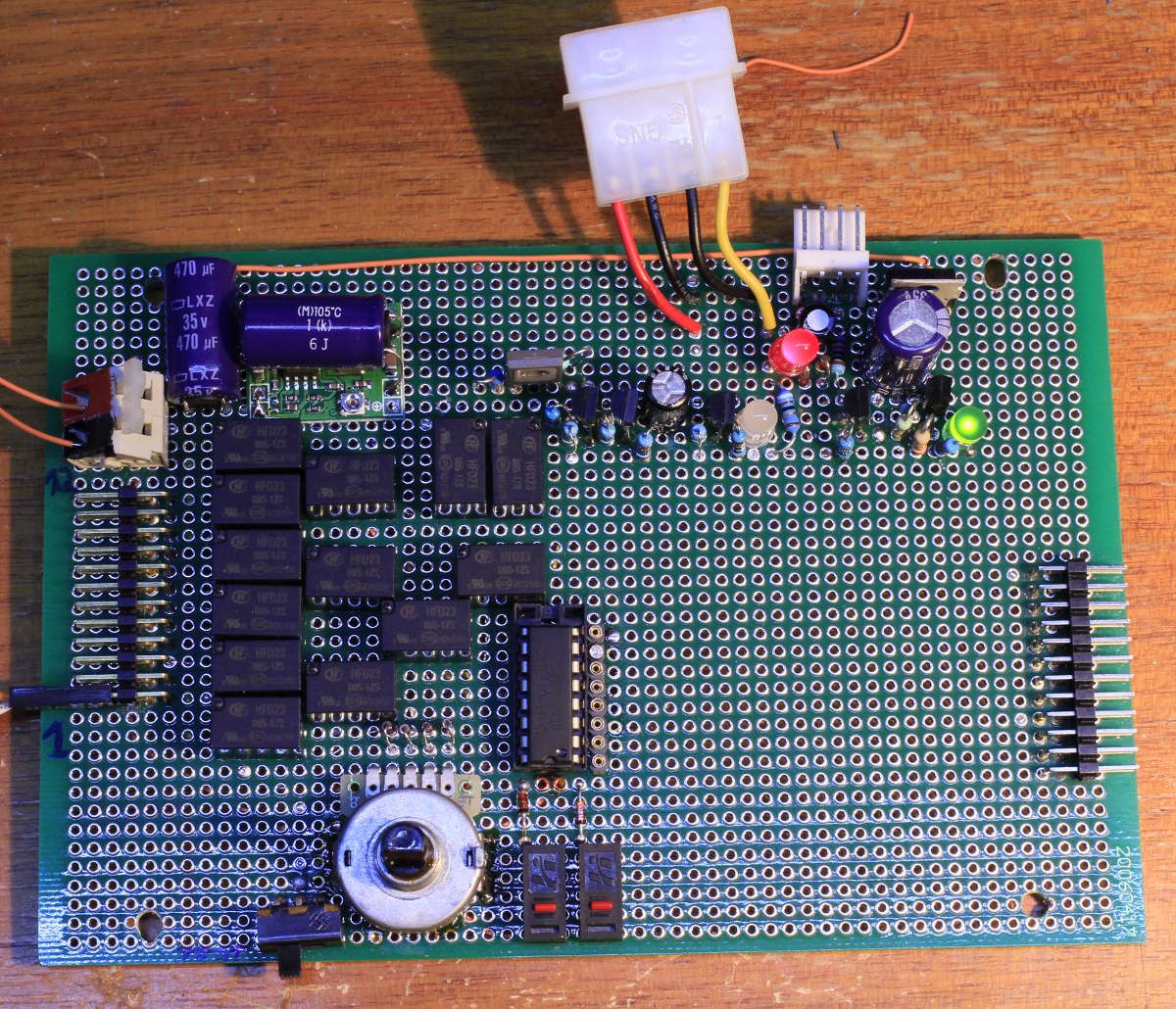
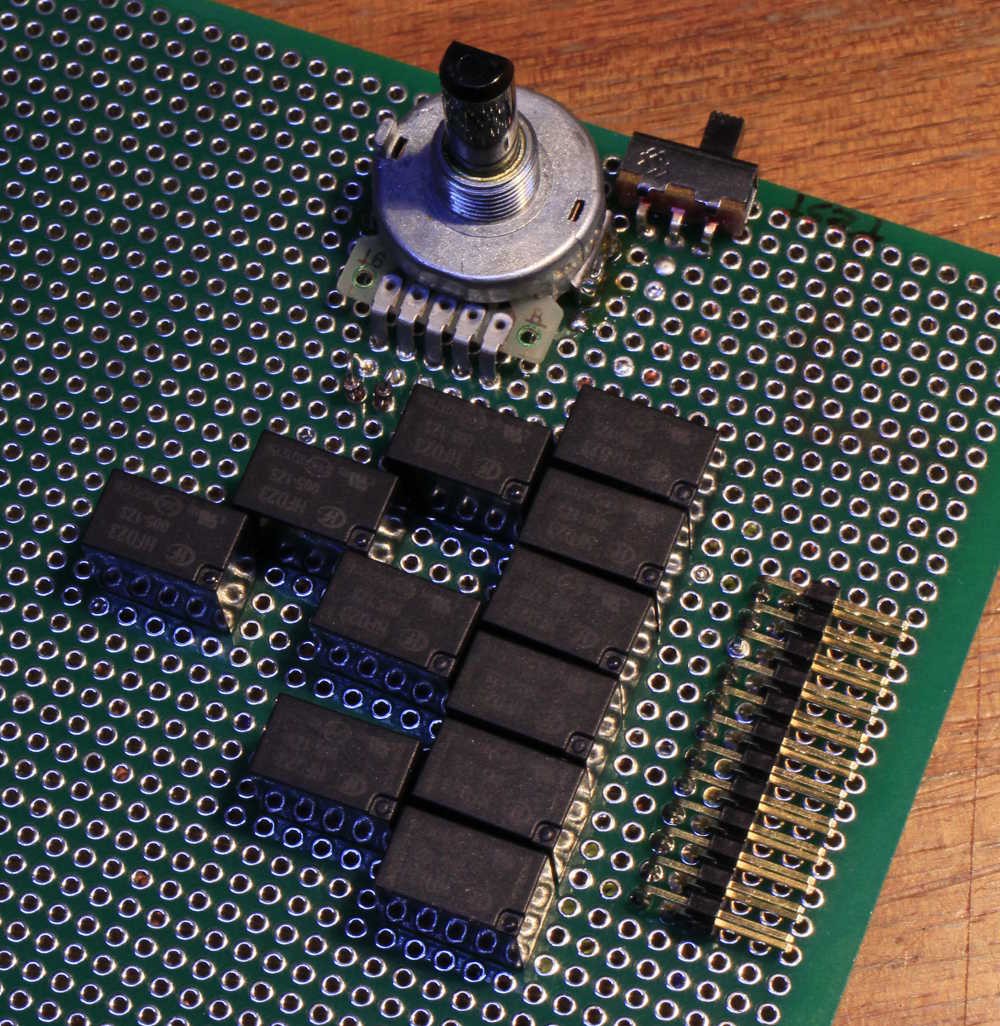
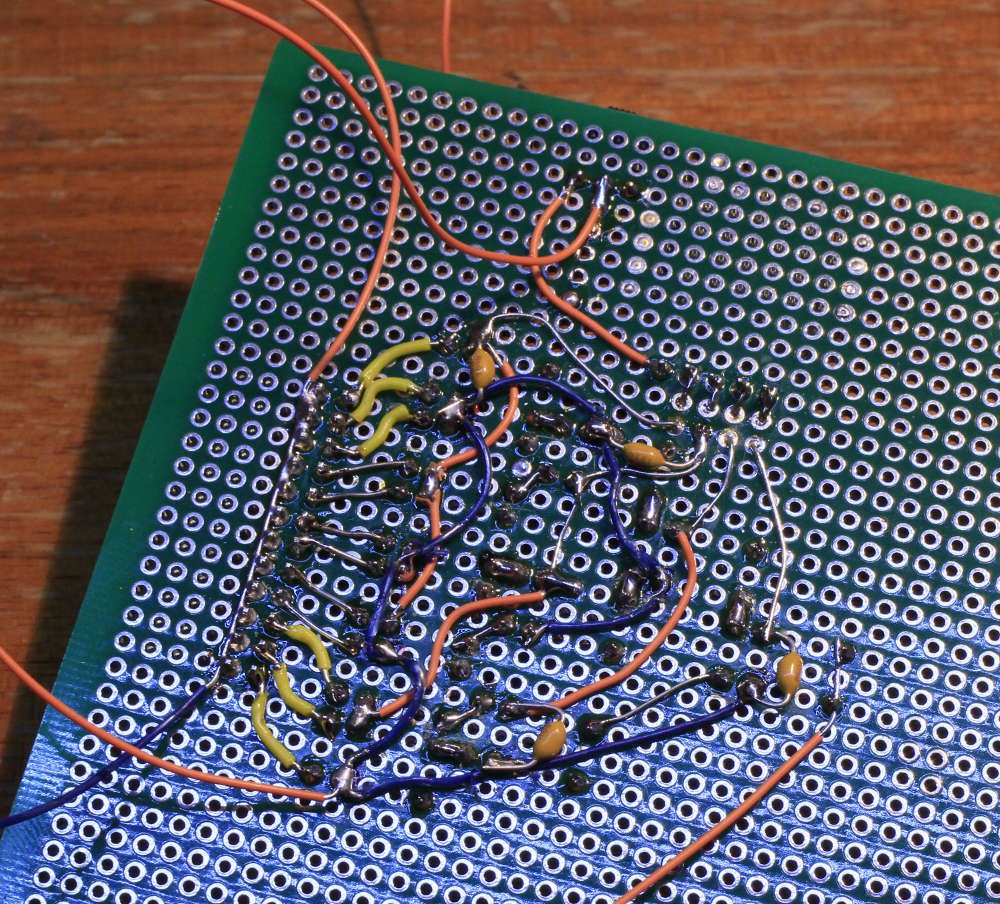
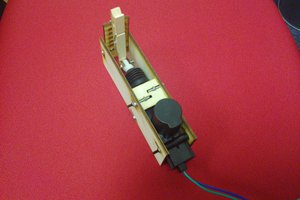
Bob has built two chess boards with traps, operated by individual servomotors. Each chess pieces has a magnet, that is detected by reed sensors. My mission is to create the electronic board to control the whole thing... Uncontrollably.
Logs:
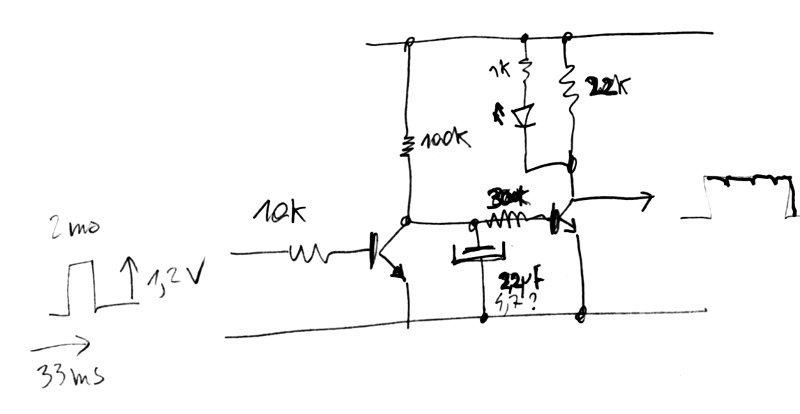
1. Timing
2. Plot twist !!!
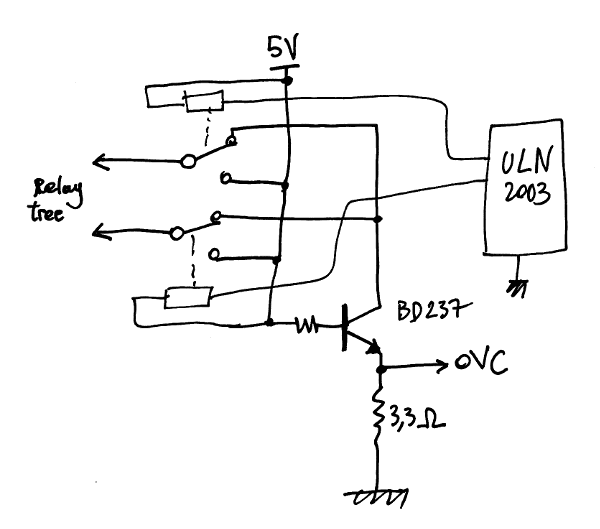
3. Power distribution
4. More work
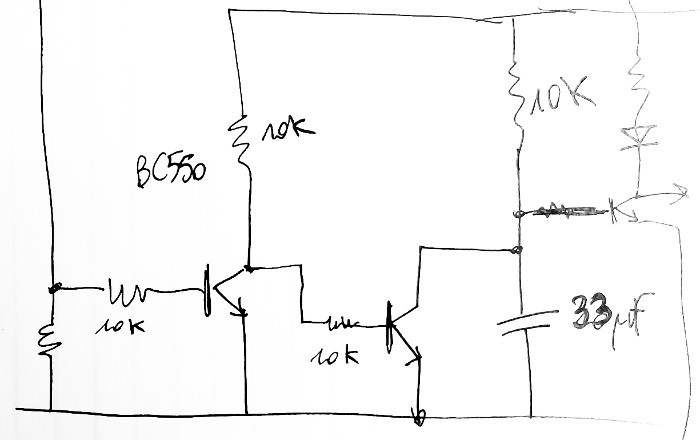
5. a not-so-basic current sensor
6. Connecting the timer
7. first tests with the checkerboard
8. More progress
9. Power Supply redesign (20190331)
10. First prototype working !
11. Finished
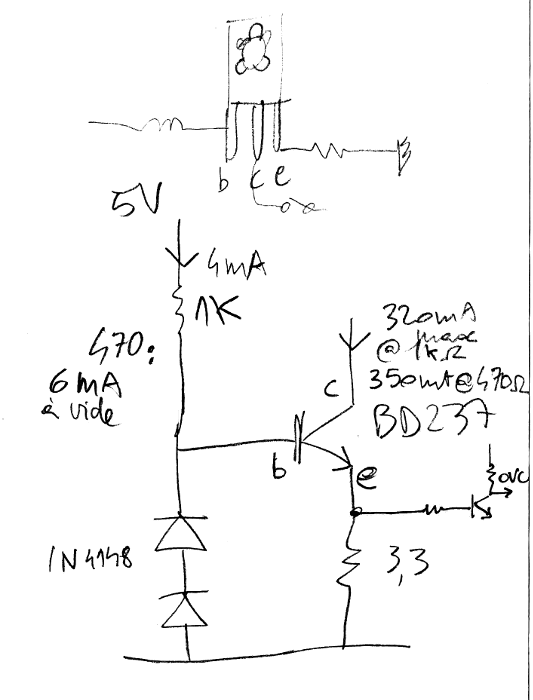
12. Some schematics









 Jose Ignacio Romero
Jose Ignacio Romero
 adria.junyent-ferre
adria.junyent-ferre
 SUF
SUF
Haha, that's great! Chess...with the element of surprise! Good effort on attempting to do it all in discrete logic...guess we can't give up our micro's just yet!