 Yann Guidon / YGDES
Yann Guidon / YGDESPrototype #2 is working, delivered, installed and working ! Now is the time for preservation : I must save all the notes and diagrams I have created during the development, not just for your awe and viewing pleasure, but also to help if I ever have to repair/fix/check/adapt the crazy BMOW...
Board#2 is not identical and has a gotcha or two but it works, here I am testing the overcurrent detection circuit to check the logic levels, so the PIC has no ambiguous reading.
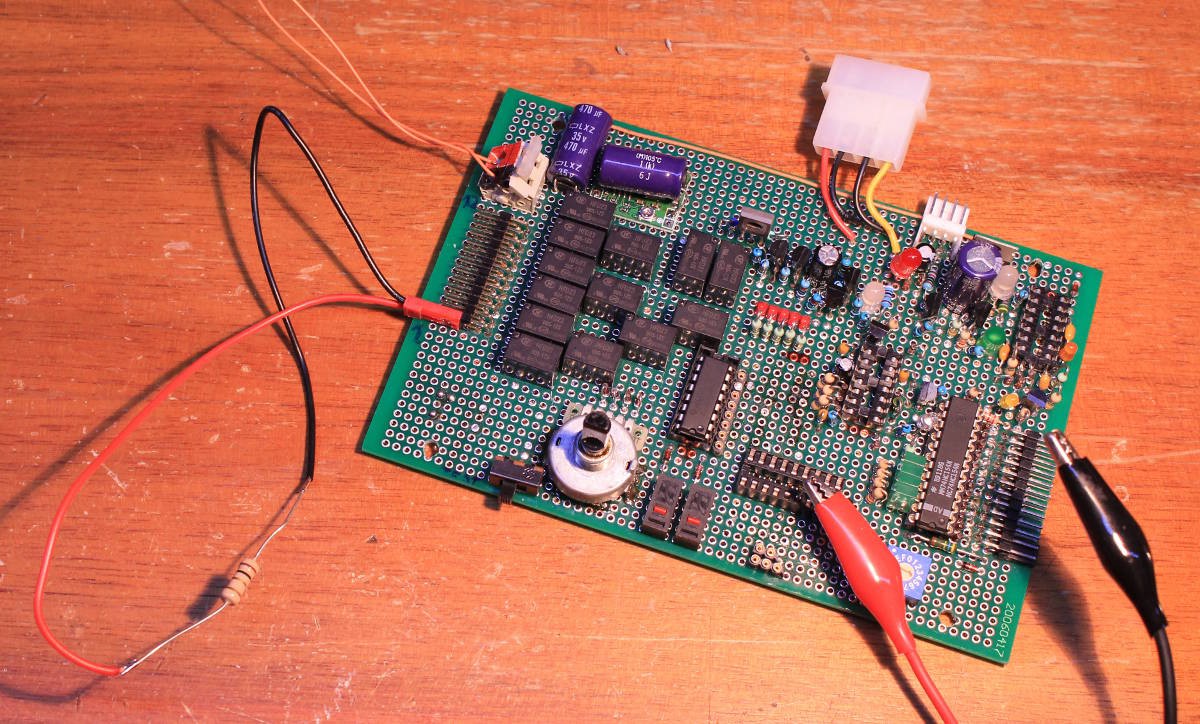
I might have damaged the current limiter with the low resistance but the bug disappeared later, I don't know why...
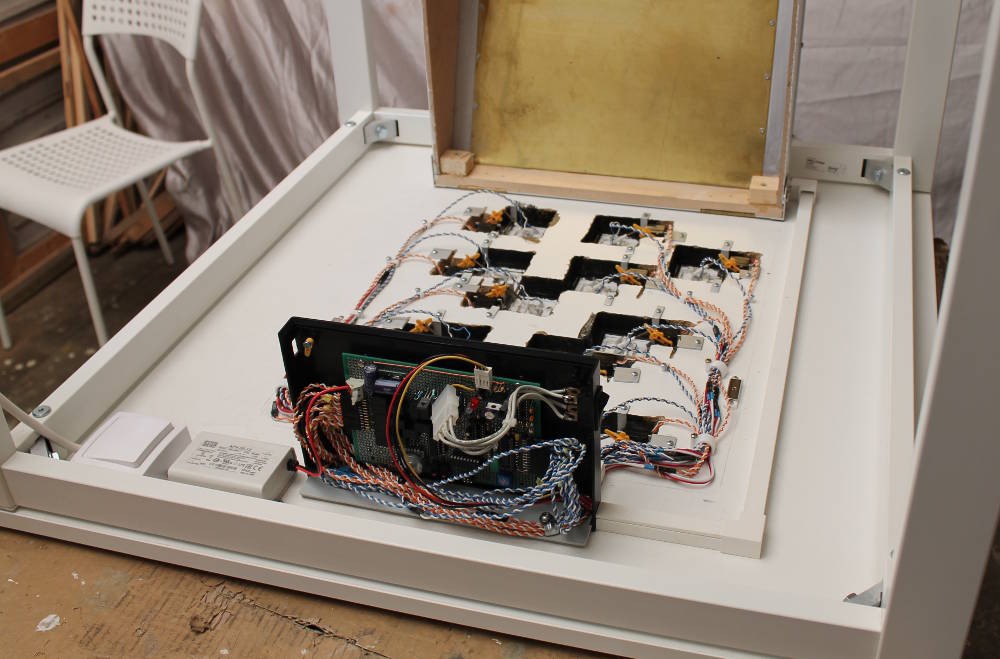
The board is fitted under the table, close to the 12V power supply. This version uses all the 12 channels !
Bob has a few mechanical kinks to iron out but overall the system works like a charm ! Not a surprise when you've been developing something for more than a year ;-)
(sorry for the mostly fuzzy video)
One thing I got right this time : the "difficulty" selector is a rotary hex encoder. The values are accurate, if you select "1" then only one trap is scanned at each turn, and if you select F, all the traps are scanned. It's better than the DIL switches of board#1 but you need a screwdriver.
One thing I messed this time : I added a 4th inverter to clean up the levels of the overcurrent sensor and it's tied to the LED... But the LED is high side and I put a NPN transistor through a 10K base resistor, which dumps enough current through the base that the LED stays turned on (lightly). I totally forgot that I added a PNP inverter that removes this problem ! (but "it still works").
Due to the differences with inverters, I had to modify the source code of the 818, complement some levels and I even added a timeout in case of problem with servos (broken, disconnected...) which would block/freeze board#1 in an endless loop (I know, it was lazy, but I was in a hurry). I just uploaded their source code, "just in case I might need it one day".
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.