 agp.cooper
agp.coopergCode to SCARA
The code is basically done, some check work remains.
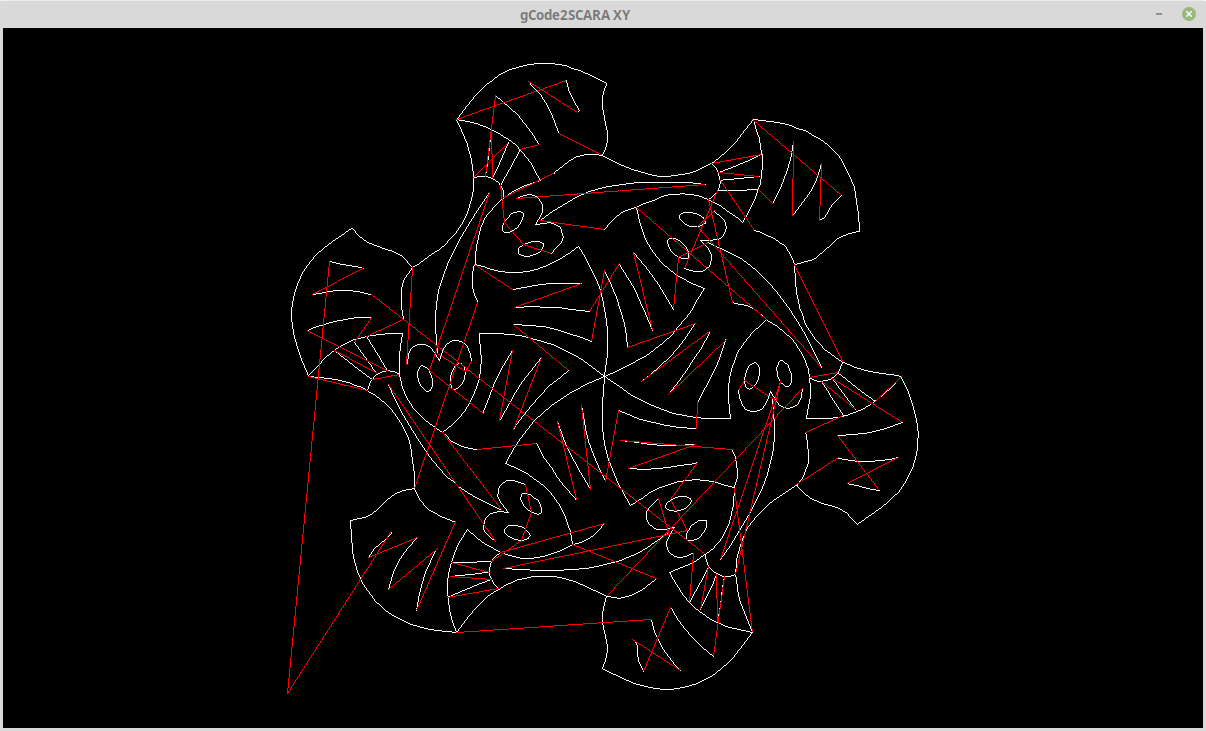
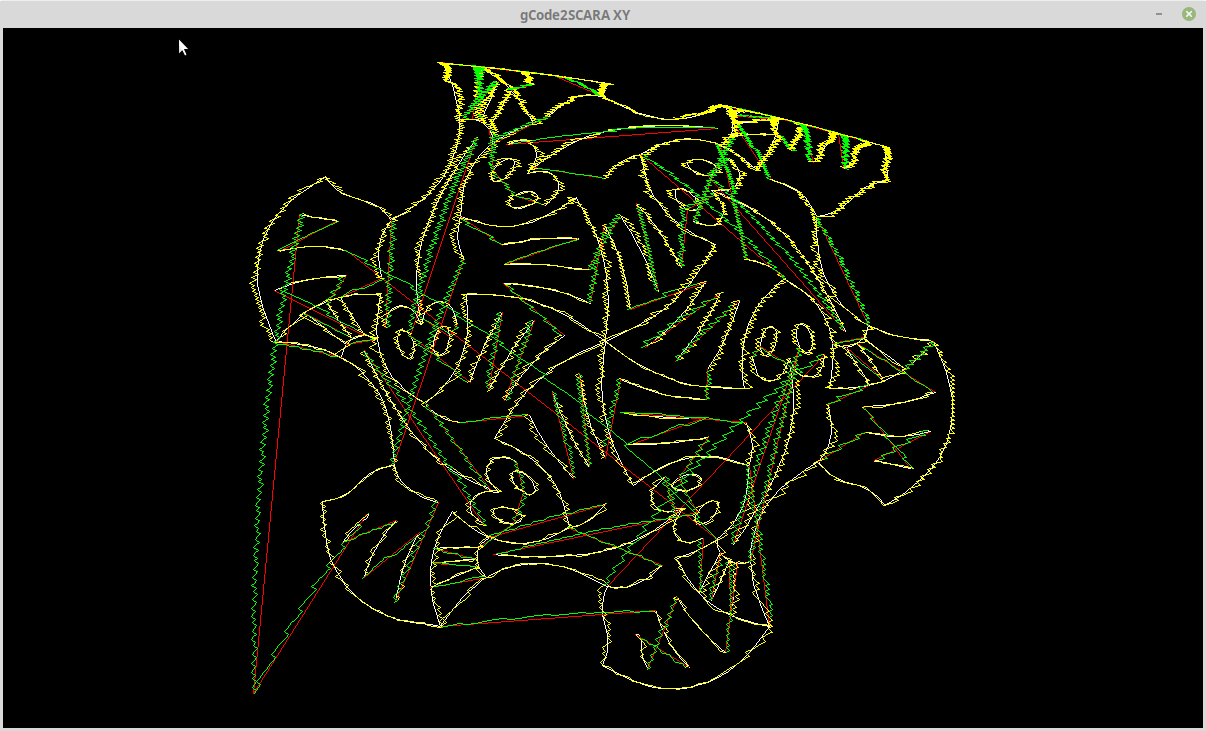
Here is the XY space (filtered from 45984 points down to 2029 points, i.e. -t 0.01):
And here is the UV Space (-s 0.01 and 2029 points, no additional inserted point):
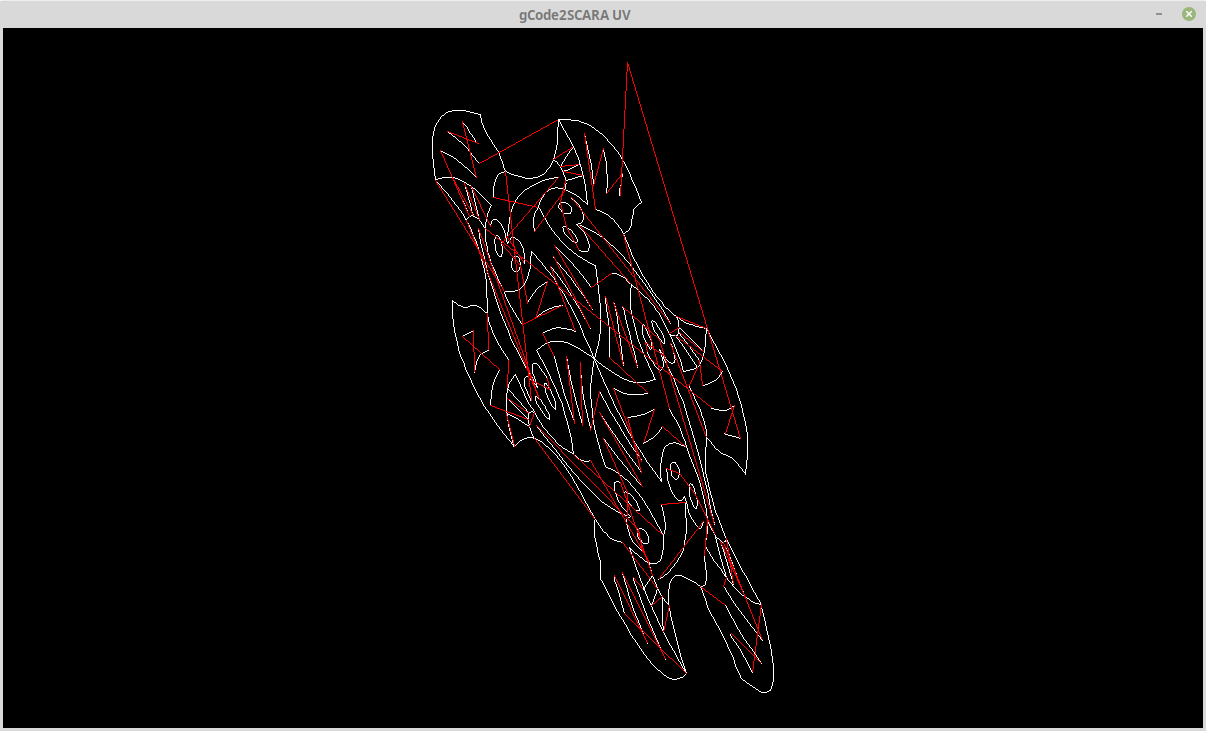
The UV plot (i.e. the output) however does not consider the step resolution (i.e. UV space is floating point). The plot seems to be in the wrong quadrant (it is possible as I have changed the reverse kinematics mathematics).
I will will have to create another plot window to show the effect of step resolution.
So just some tidy up remains.
Code Checks Out
Yesterday I was helping my partner clean her house after the floor boards were sanded and varnished. So no work!
The code checks out, need to do something better for when the arms will not reach, currently just set the location to (0,0). Better to make it obvious in the imagery.
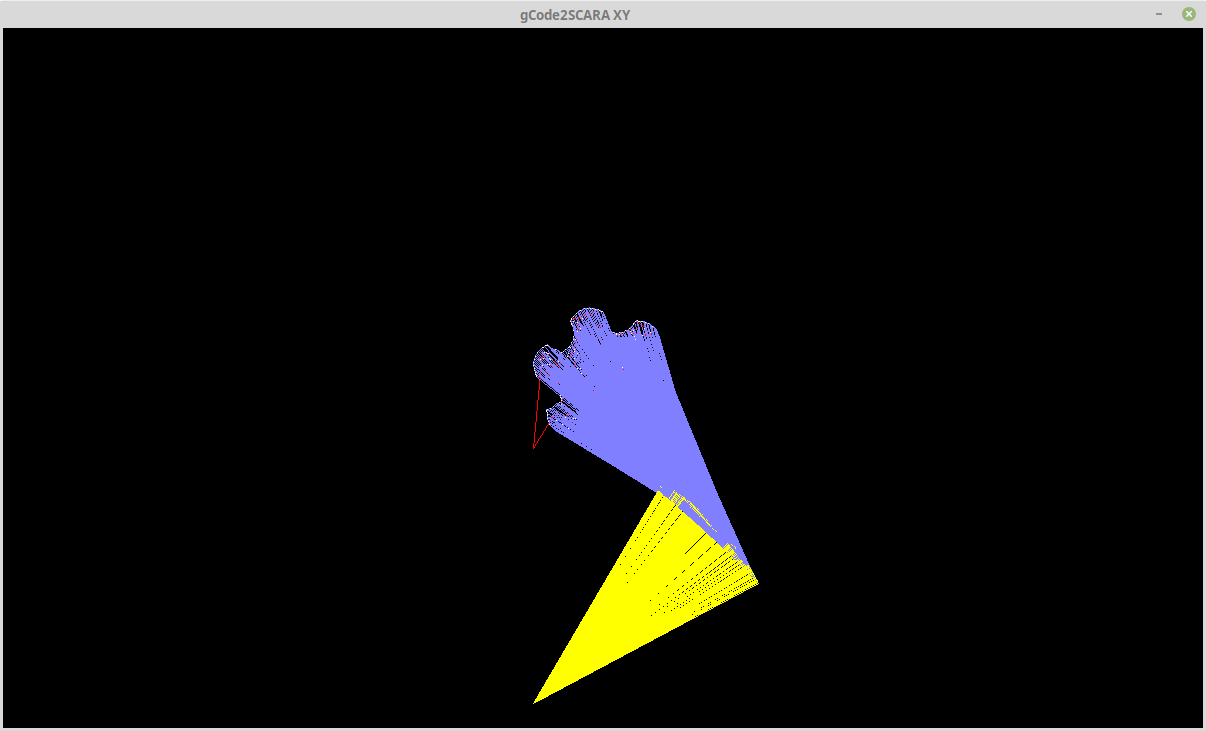
Checked that the reverse kinematics works in all quadrants. Here is an example with the arm movements shown:
Added a Bressenham trace (yellow/green), in this case for M1 and M2 equal to 400 steps each (note, the image has been shifted to exceed the limits of the reach of the arms):
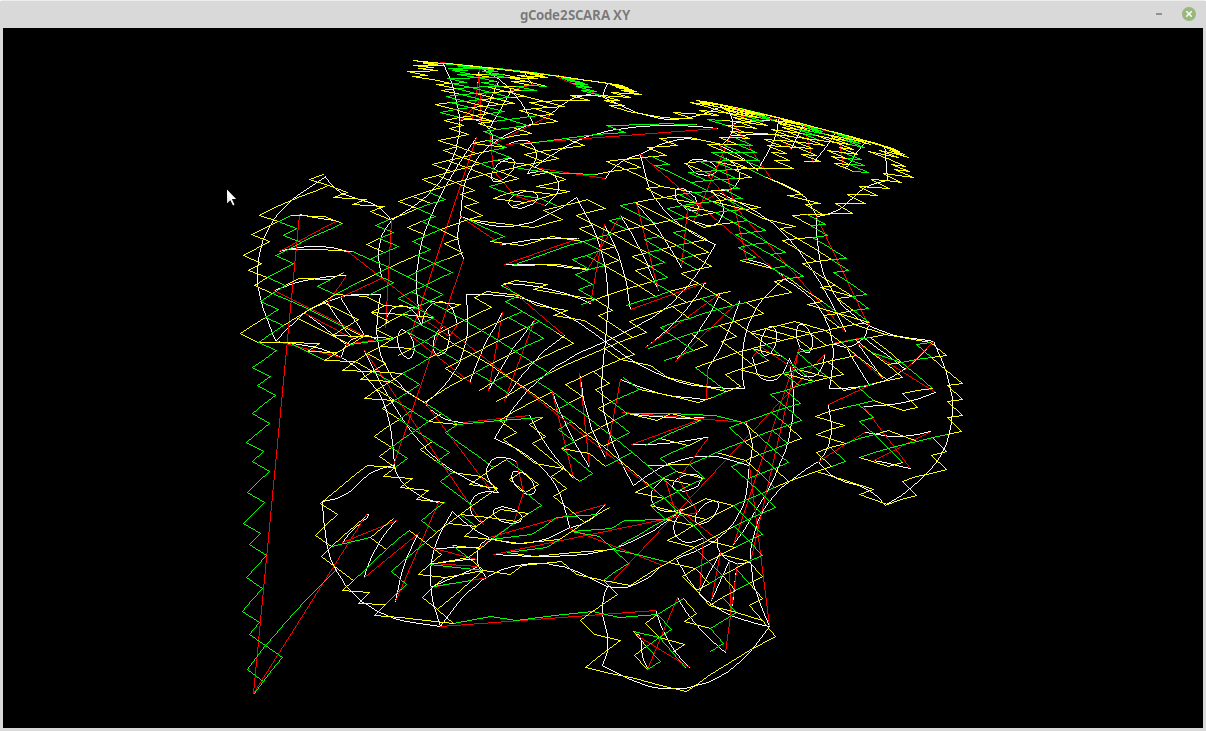
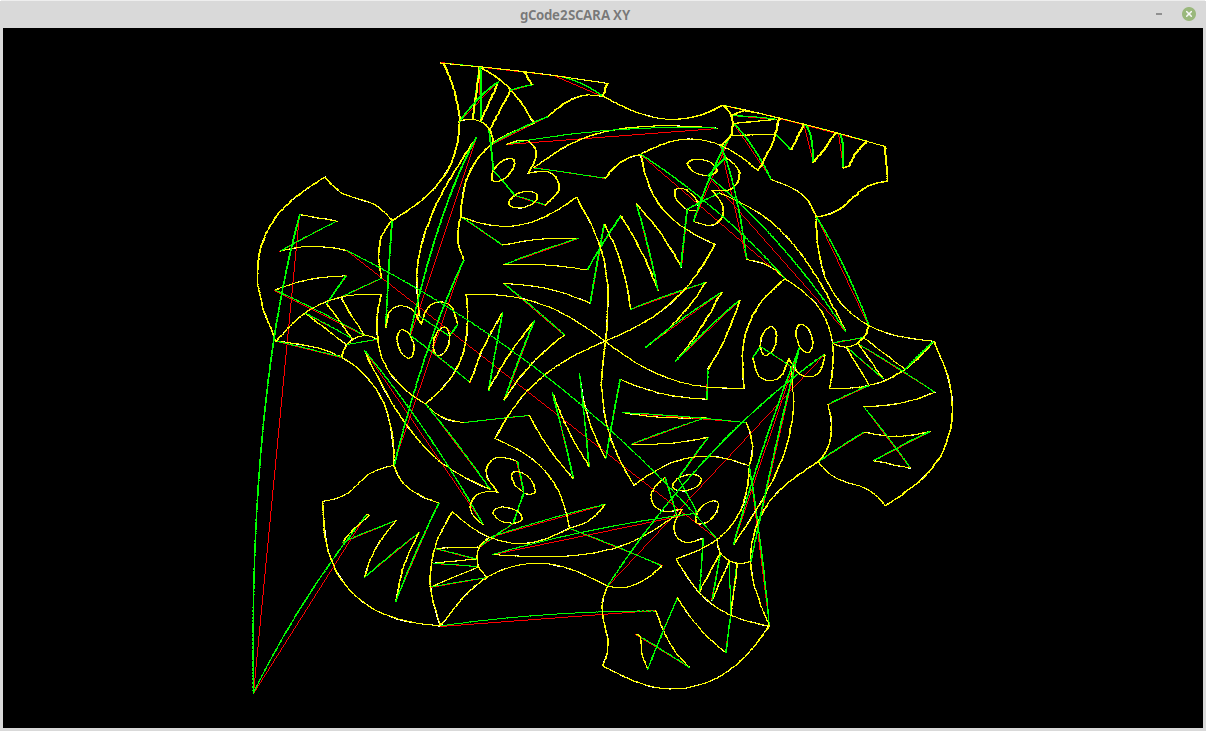
Here is the case for M1 and M2 equal to 1600 steps (1/4 micro-stepping):
And finally M12800 (1/32 micro stepping):
Note that G0 (rapid movement is an arc rather than a straight line).
So other than modifications required (discovered) when I actually use the code on a machine, it is done.
AlanX
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.