 Ben Peters
Ben PetersWith the completion of the sliding mechanism, it was time to build the entire prototype 2 chassis.
The aim of this prototype was to integrate a crane boom into the chassis.
The secondary improvements based on critisims of the first prototype were:
- Clips to secure battery and reduce swinging about
- Wires from stepper to be easily routed
- Power switch to be connected to the robot frame rather than floating
After many late nights, the picture below shows the completed result.
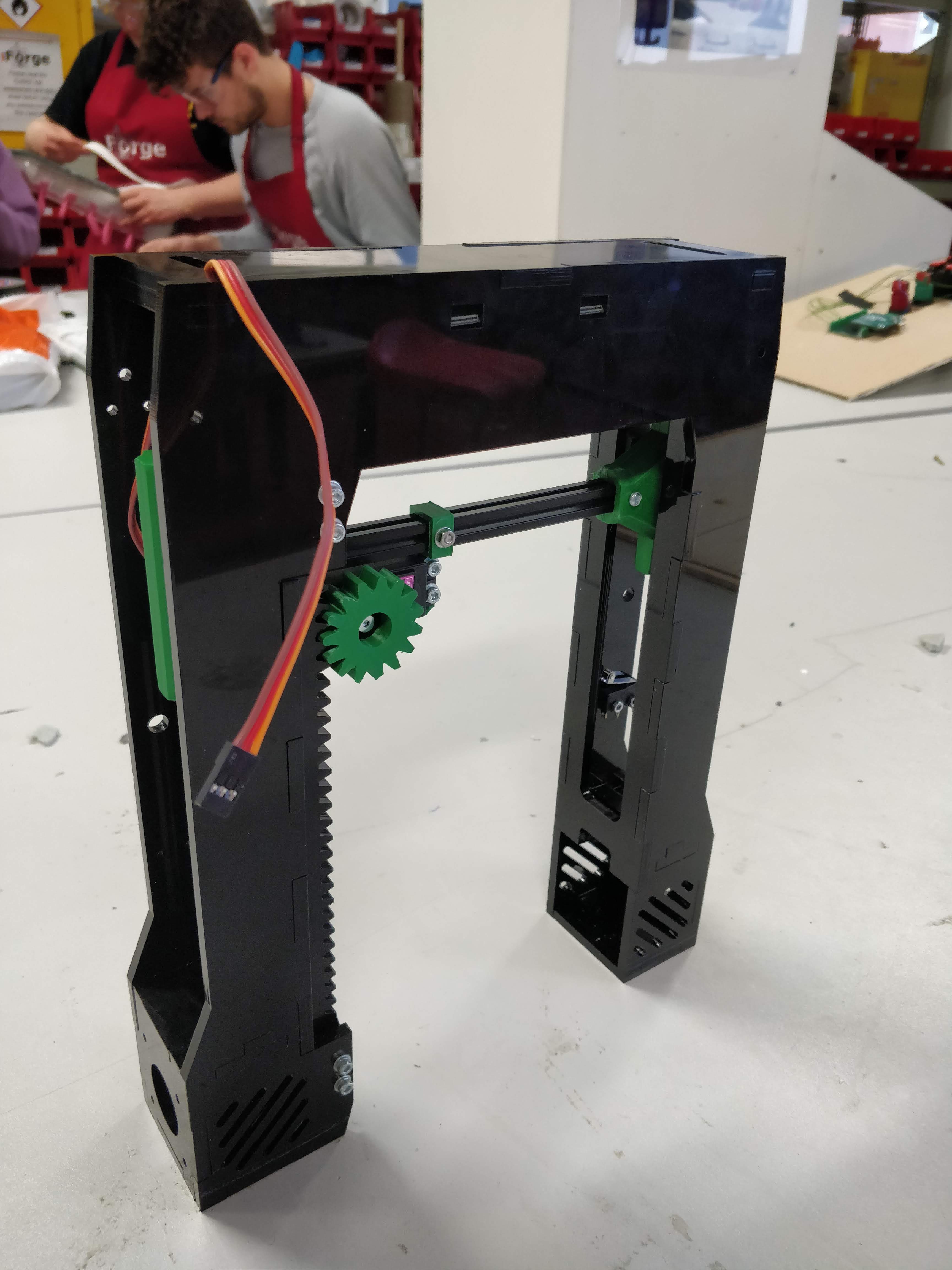
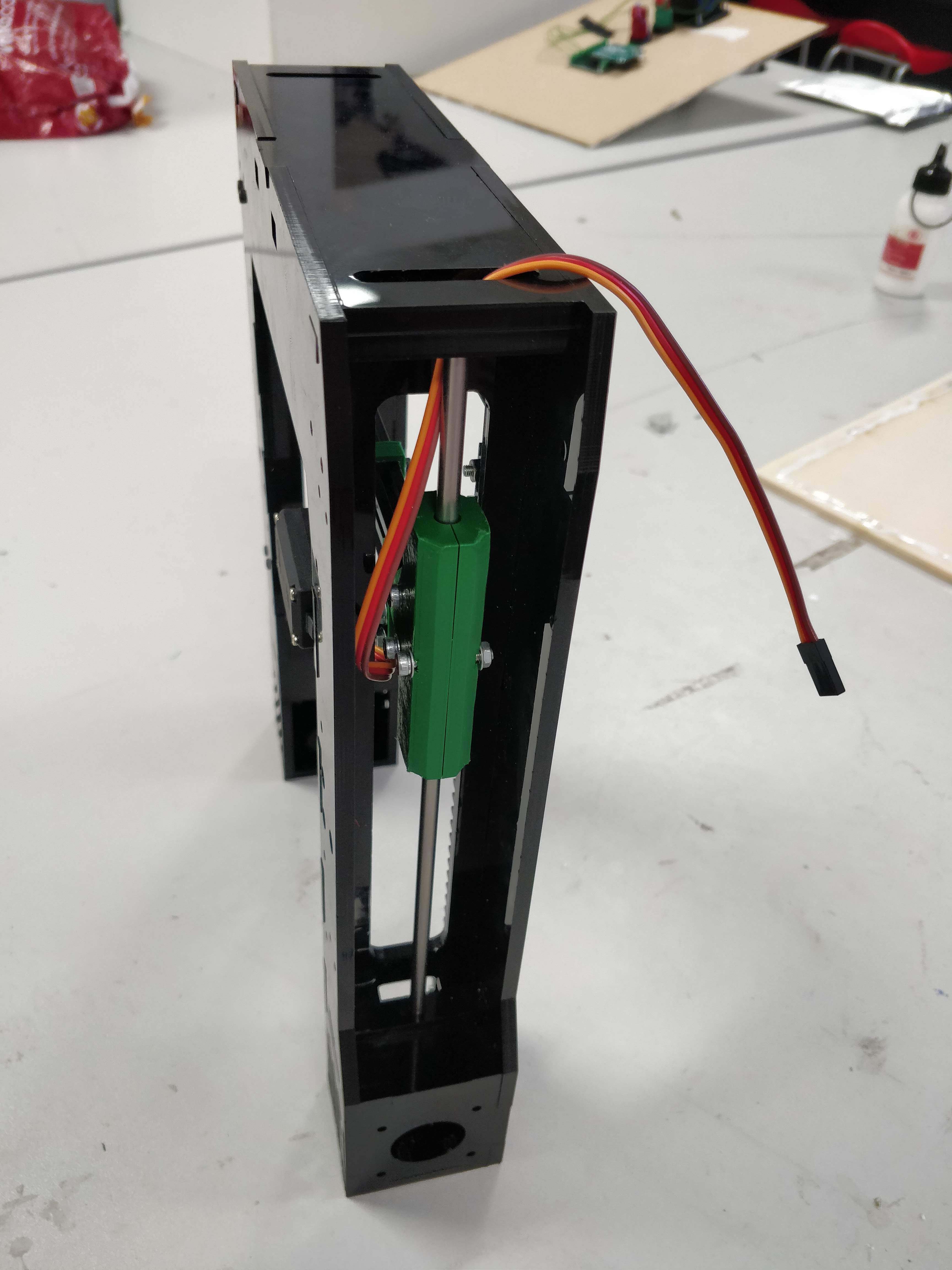

Please see the link to a video of the operational crane mechanism!! LINK
My main goal now is to integrate this with the self balancing capability of the first prototype. I also intend to move from a breadboard to a soldered stripboard because this has been causing me many issues.
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.