 Ben Peters
Ben PetersThe robot suffered a fall at the start of this week that hindered my progress somewhat. Upon falling over, all components operating directly from the battery voltage got fried; my Arduino Nano clone, and two stepper drivers. Check out the picture below that shows the Nano's burnt out voltage regulator...
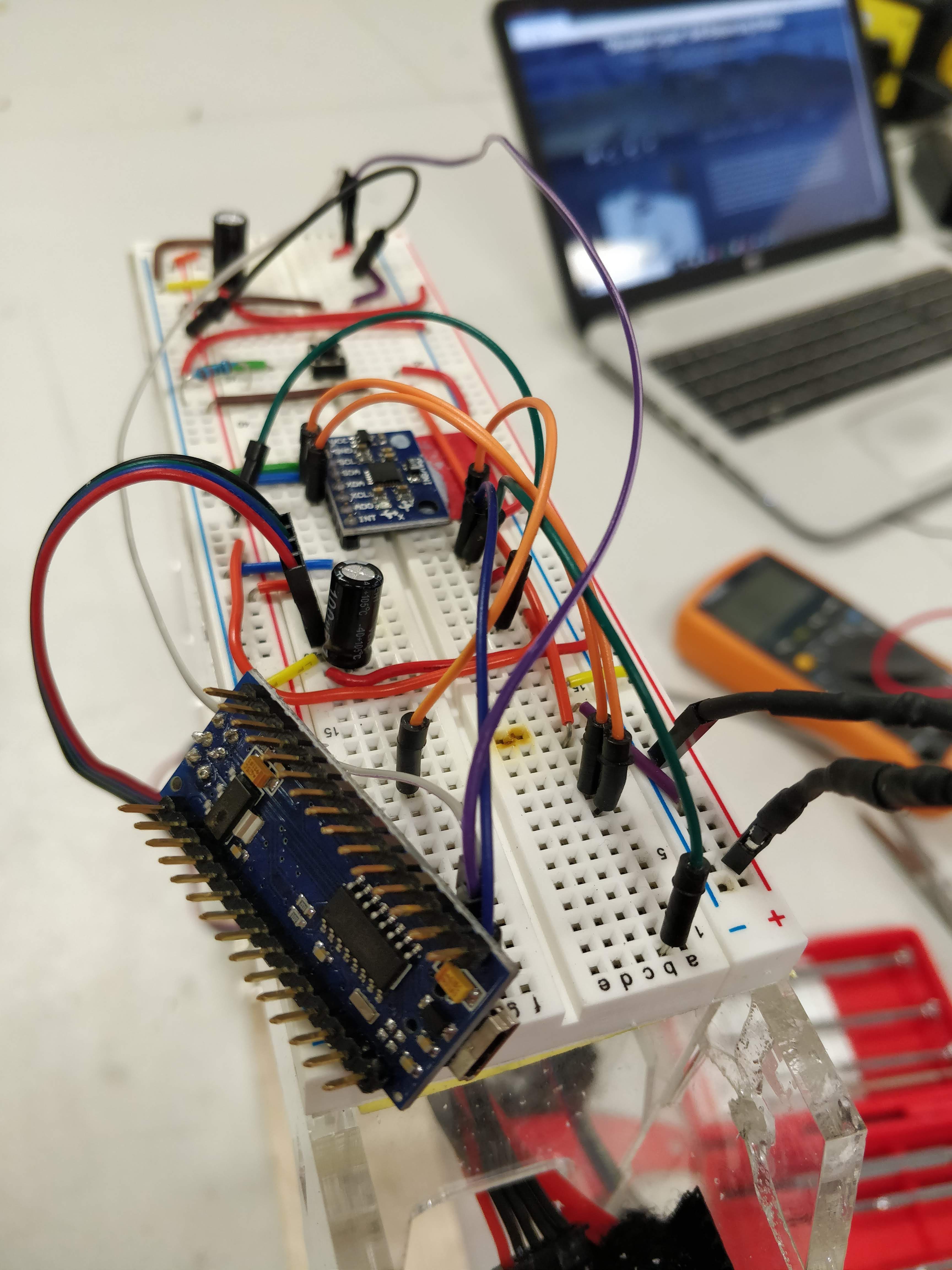
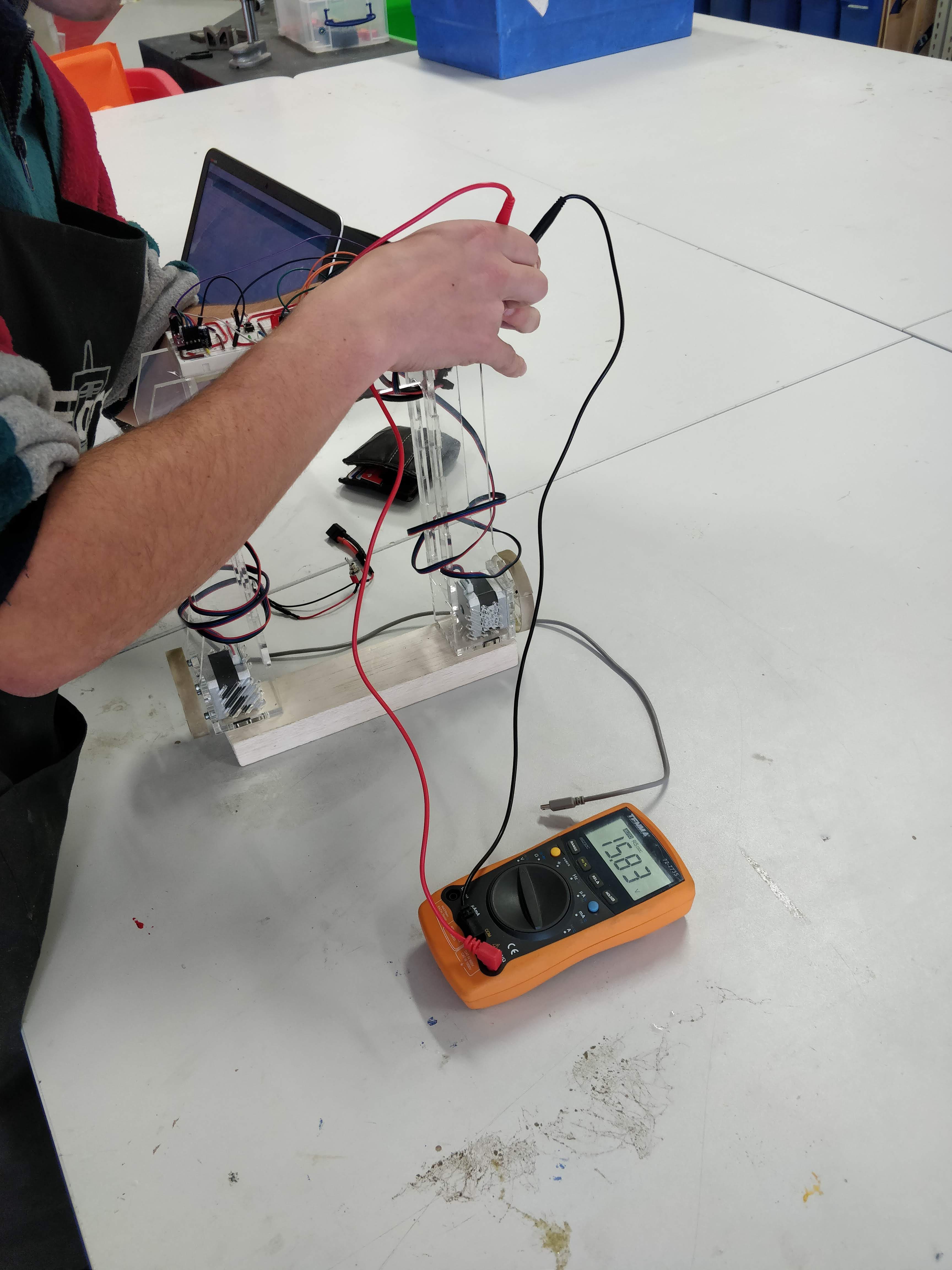
I had to acquire replacement parts which took some time. In the mean time I set about adding the capability of the robot to measure its own battery voltage so that I would be warned if the LiPo battery was dangerously low in remaining charge (I should have done this a while ago). It now gives a warning by turning a red LED on, and its readings were verified using the serial monitor and a voltage meter. You will see the circuit changes and code updates in the near future when I upload the revised code and circuit diagram.
With the replacement of the components and some adjustment of the code, my robot is now fairly successful and I am ready to add a controller and make the robot steer around. Please see the link below for the test that verifies that I am ready to move on to control :)
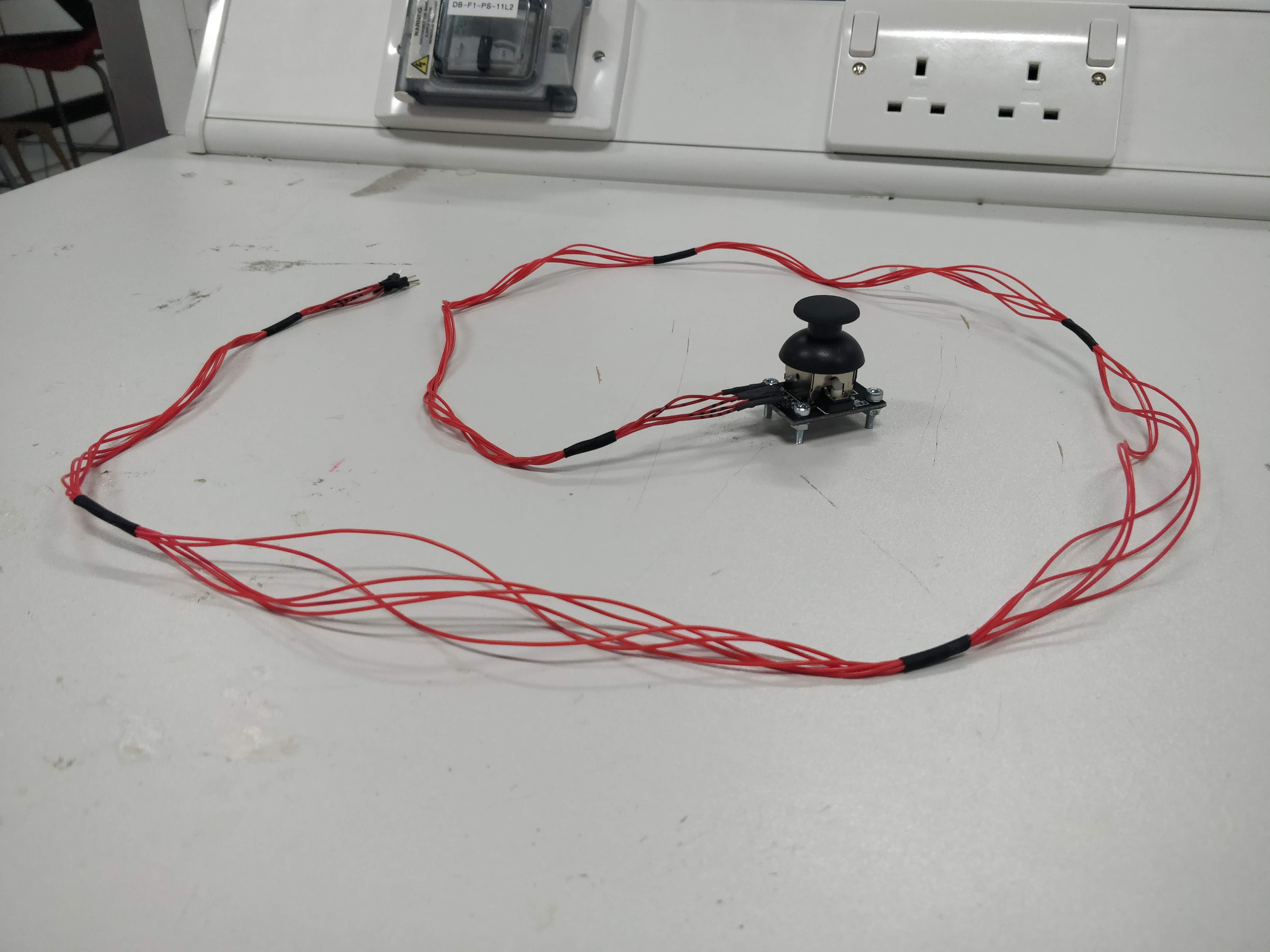
I was going to use a Bluetooth and a custom built android app to control the robot (and still intend to eventually). However, at first I will use a wired joystick module to see if I can just get the robot to responding to inputs (lessening the amount of variables that could cause failure). Today I have started by making long jump wires:
P.s. there is still a drift issue as you can see the robot constantly moving away from its starting position, I am hoping I will still be able to control the robot with reasonable accuracy despite this issue. Any advice here would be very useful (see previous log for more detailed explanation).
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.