 lion mclionhead
lion mclionheadThe tracking camera isn't useful unless it's portable. It's been running on an Asus GL502V for years. It only goes full speed on manes voltage & with ice packs. NVidia jetson is the only portable hardware specifically mentioned by openpose.
The peak openpose configuration seemed to require 8GB of video RAM for a -1x384 netInputSize, although it gave acceptable results for years on 4GB of RAM & a -1x256 netInputSize.
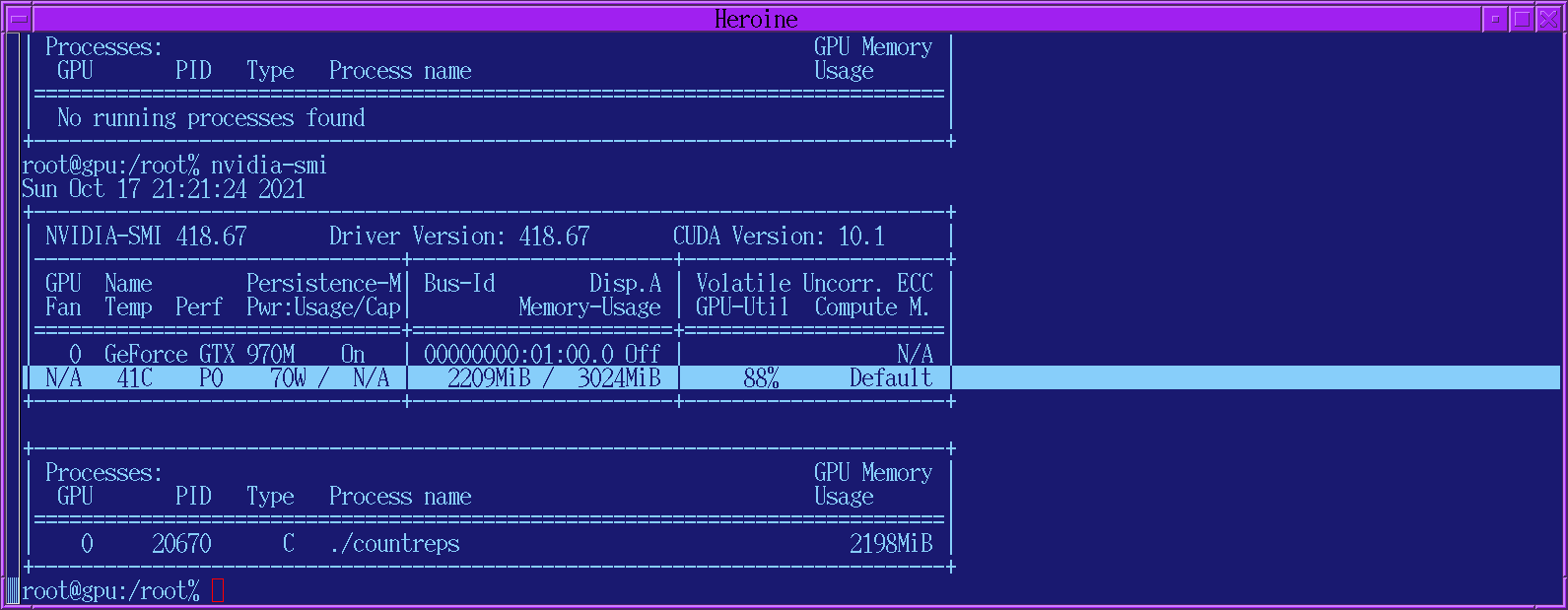
Running nvidia-smi with openpose running gave the memory requirement of a -1x256 netInputSize.
The Jetson nano has evolved from 2GB to 4GB over the years without any change in model number, which has caused a lot of confusion. It's based on the Maxwell chip which is what the GTX970M used. Jetson nano's with 4GB range from $100 to over $200 & are all out of stock.
https://www.sparkfun.com/products/16271
https://www.okdo.com/us/p/nvidia-jetson-nano-4gb-development-kit/
There is another pose estimator for goog coral.
https://github.com/google-coral/project-posenet
But a rare comparison shows posenet being nowhere close.
We don't know if it was processing in realtime or offline with maximum settings, how much memory was allocated to each program. Goog coral modules are similarly priced to jetson & equally out of stonk.

The plan envisions a Jetson module & LCD driver strapped to the back of the last LCD panel. There will be a webcam on a new pan/tilt module for rep counting & the DSLR on the servocity module for animal tracking. A new board will convert USB output to servo PWM for camera pointing & convert IR remote signals to USB input for user input. The servo power will come from the USB cable, by hacking the USB ports on the jetson to output 5A. It'll all be self contained with the LCD panel.
The user interface will be an IR remote with key maps shown on the screen. The only way it could be debugged in the field would be a phone with a USB cable & some kind of ssh terminal.
The jetson burns 5V 2.5A itself. The servos burn 5V. The LCD panel burns 8-12V. There need to be 2 BEC's to power everything from either a 12V battery or ATX brick. The 16V batteries envisioned for the truck wouldn't do much good for the LCD. The mane thing keeping it a plan instead of reality is of course that pesky 2 year disruption in the transient supply chain.
Obtaneing the required confusing power has been so problematic, the lion kingdom believes the total confusing power of the world is less than it was 2 years ago, due to lack of new confusers being created & old confusers going out of service, but no-one is actually counting. If we have gone backwards, it would be the 1st time it ever happened since the bronze age collapse.
There was an estimate of the world's confusing power from 1950 to 2018.
https://incoherency.co.uk/blog/stories/world-computing-power.html
The lion kingdom's obsolete Ryzen 7 2700x is rated at 59000 MIPS or the entire world's confusing power in 1973.
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.