 Eugene
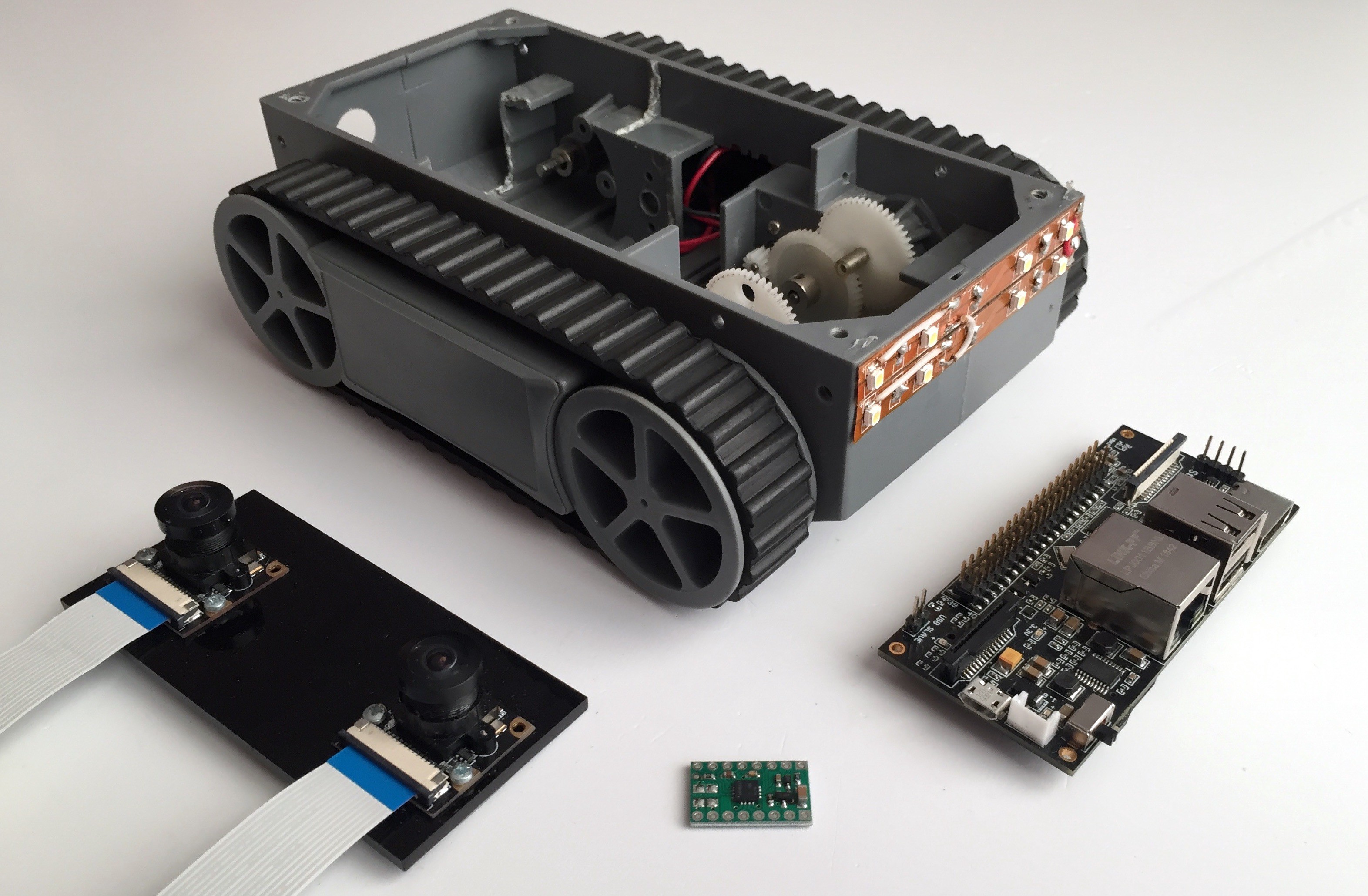
EugeneThe goal of this series of articles is to create a compact indoor robot that can navigate using stereo vision. As a platform for it, we’ll use a small Dagu RP5 platform on tracks that we have. Here’s how it looks like next to the StereoPi.
Detailed TL;DR for fisheye cameras calibration can be found here in our blog.
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.