0%
0%
Tracking without GPS
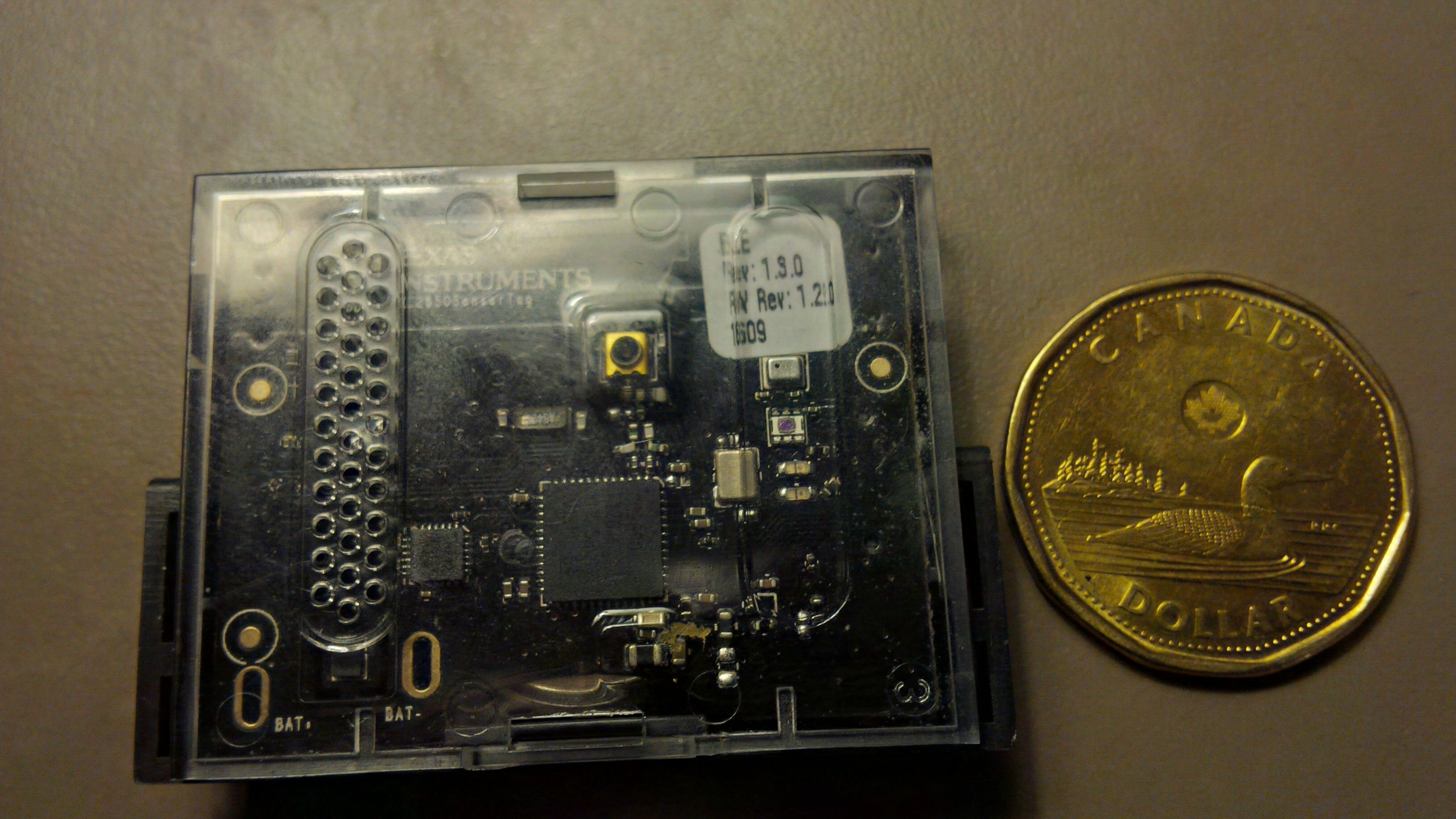
A different approach to tracking animals using Raspberry Pi 3, Texas Instruments Sensor Tag cc2650
 Brenda Armour
Brenda ArmourBecome a Hackaday.io member
Already have an account? Log in.
Just one more thing
To make the experience fit your profile, pick a username and tell us what interests you.
Pick an awesome username
hackaday.io/
Your profile's URL: hackaday.io/username. Max 25 alphanumeric characters.
Pick a few interests
Projects that share your interests
People that share your interests
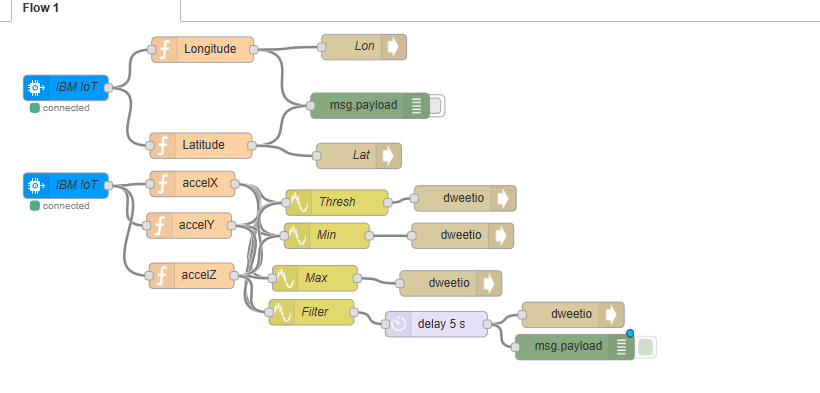
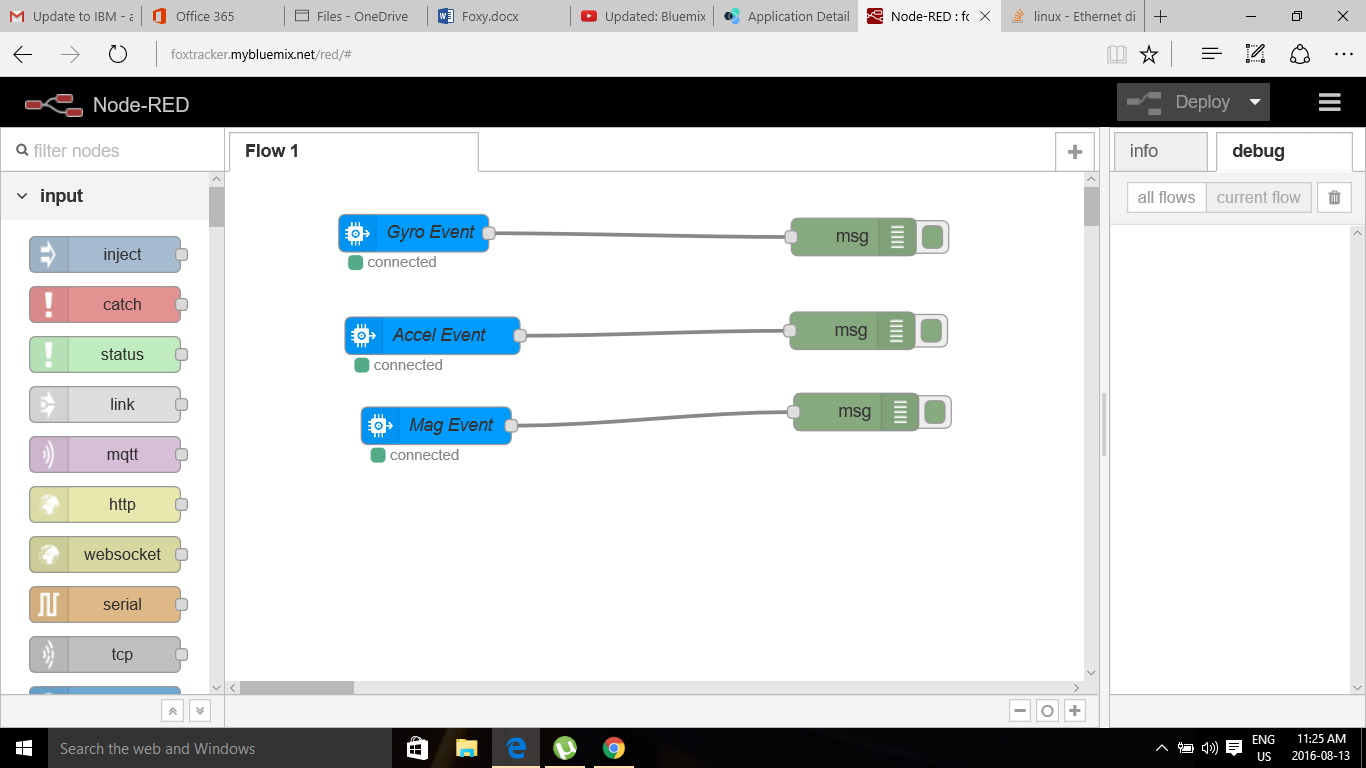
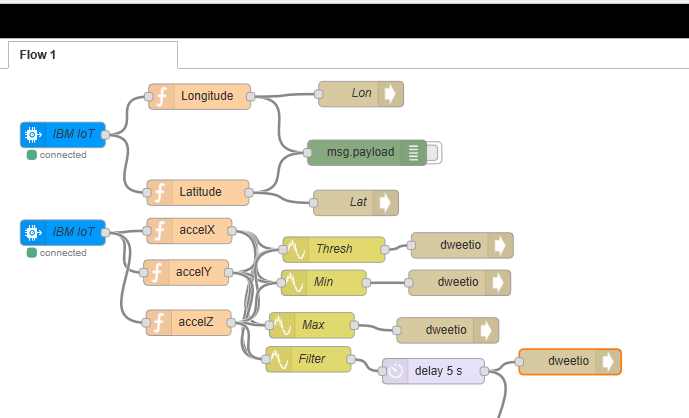
 Node Red already comes installed on the Raspberry Pi. I am using the cloud version because it was easier to program. I am also using Freeboard as a dashboard and
Node Red already comes installed on the Raspberry Pi. I am using the cloud version because it was easier to program. I am also using Freeboard as a dashboard and 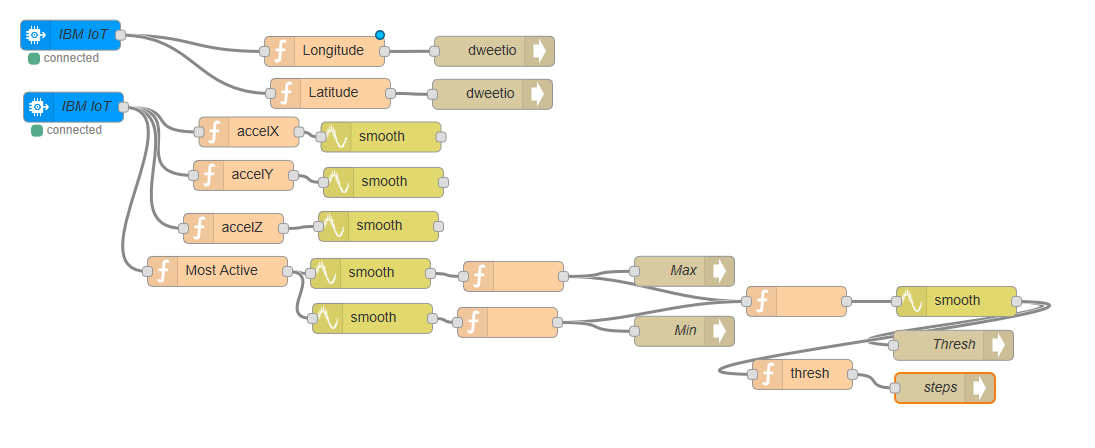 A simplified view of the model :
A simplified view of the model :



 Bud Bennett
Bud Bennett
 Manoj kumar
Manoj kumar
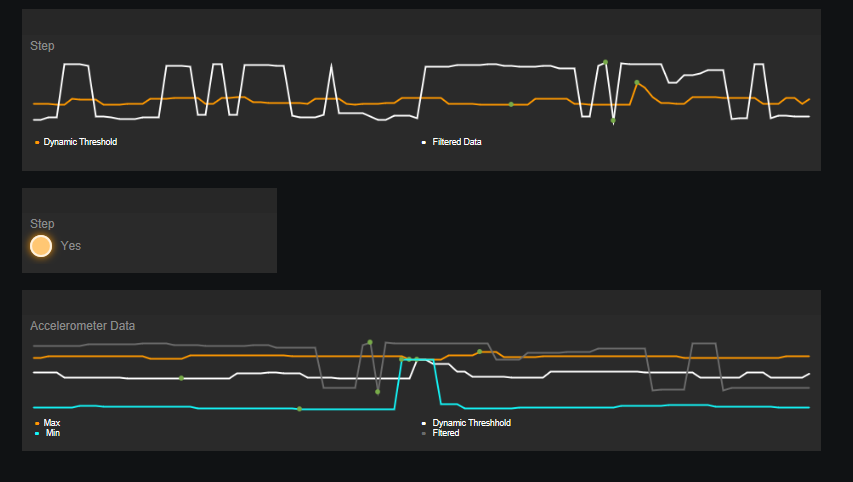
Sorry for being late to reply. My second log shows more detail to provide a step counter to calculate if a step has been taken. More to come.