0%
0%
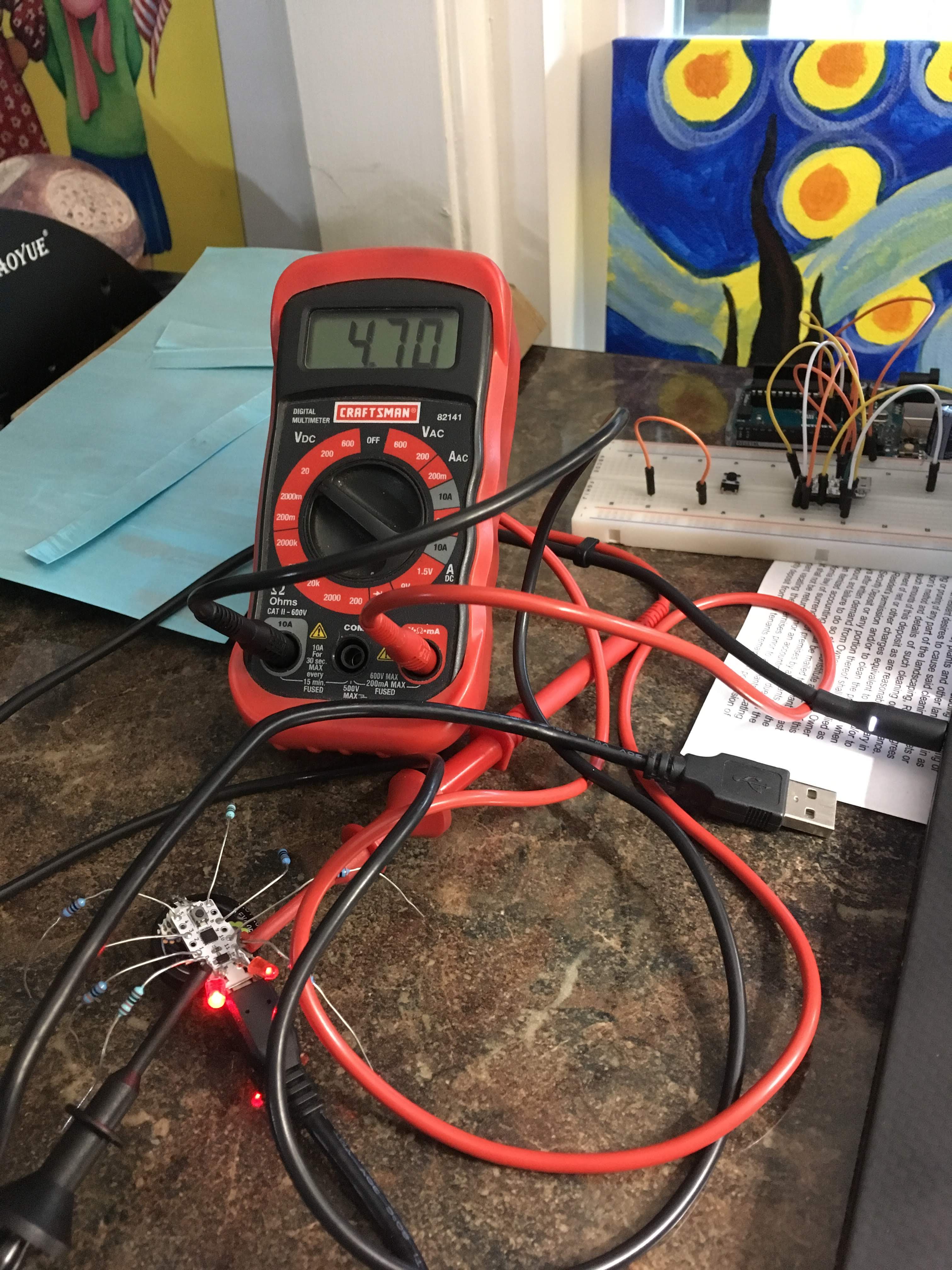
ATtiny Super Capacitor Spider
Little spider with glowing eyes powered by a super capacitor, and controlled by an ATtiny84a
 Sander van de Bor
Sander van de BorBecome a Hackaday.io member
Already have an account? Log in.
Just one more thing
To make the experience fit your profile, pick a username and tell us what interests you.
Pick an awesome username
hackaday.io/
Your profile's URL: hackaday.io/username. Max 25 alphanumeric characters.
Pick a few interests
Projects that share your interests
People that share your interests






 Ted Yapo
Ted Yapo
 Patrick Van Oosterwijck
Patrick Van Oosterwijck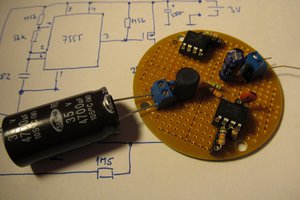
 jaromir.sukuba
jaromir.sukuba
 Simon Merrett
Simon Merrett
This is nice project for me. I thought it would move but just the LED flashed.
That's first step. See the sketch like Arduino code. I try It, many many compiling error.
Is it that sketch compiling in Arduino IDE? My environment is Arduino 1.8.19. and installed
Spence konde's megaTinyCore.