0%
0%
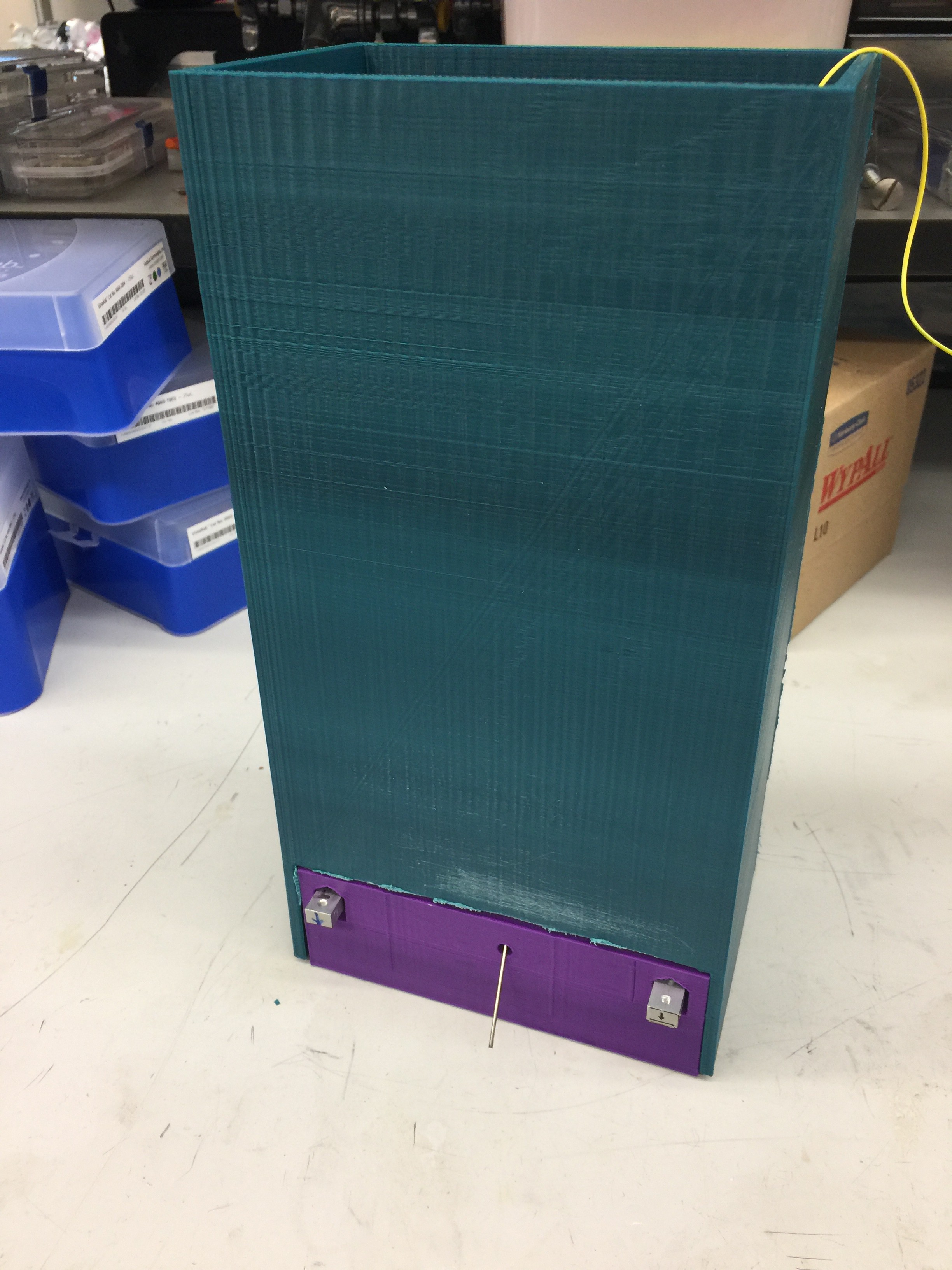
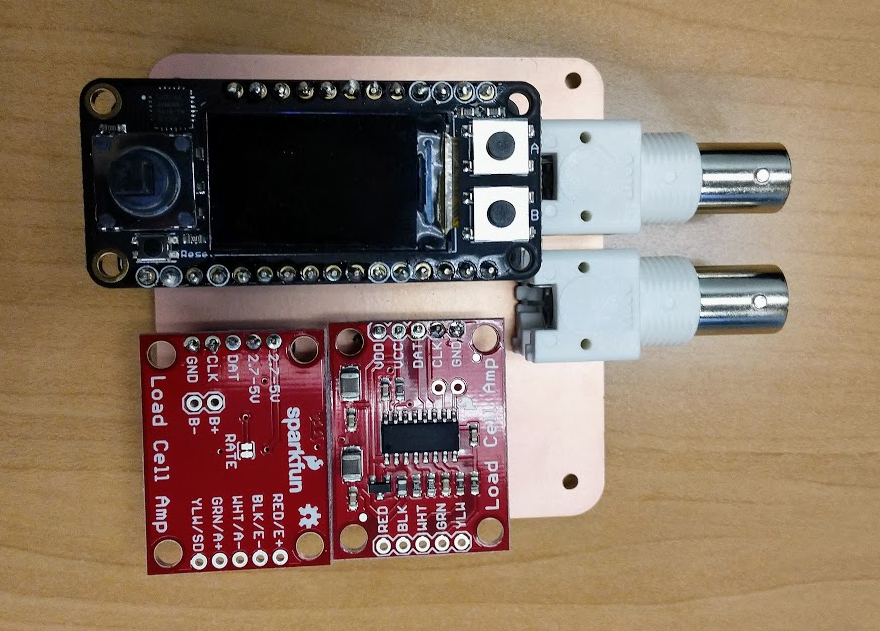
FORCE - Force Output of Rodent Calibrated Effort
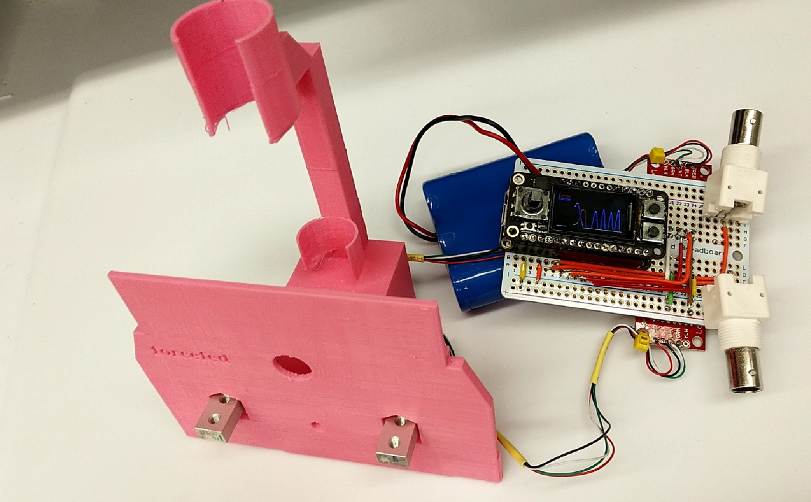
This dual-force cell monitor and reward dispenser is used to run rodent operant behavior in which animals learn to work for rewards.
Become a Hackaday.io member
Already have an account? Log in.
Just one more thing
To make the experience fit your profile, pick a username and tell us what interests you.
Pick an awesome username
hackaday.io/
Your profile's URL: hackaday.io/username. Max 25 alphanumeric characters.
Pick a few interests
Projects that share your interests
People that share your interests






 WΛLLTΞCH
WΛLLTΞCH
 Peter Wasilewski
Peter Wasilewski
 Matias N.
Matias N.
 Chris
Chris
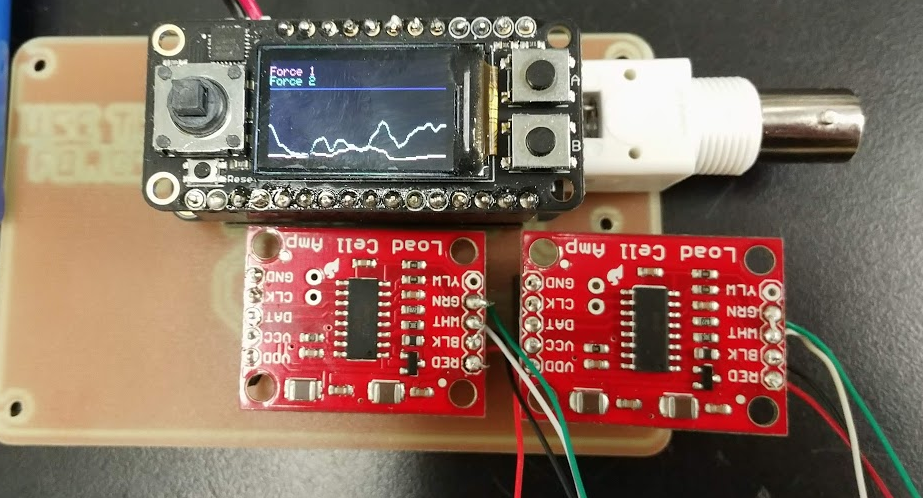
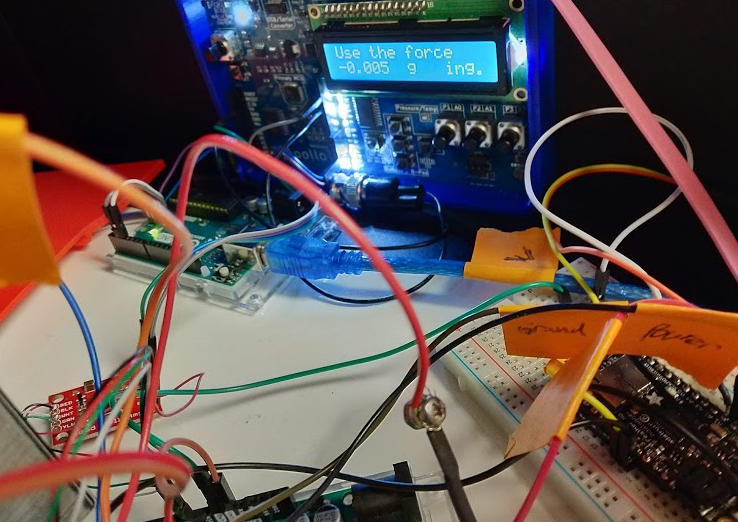
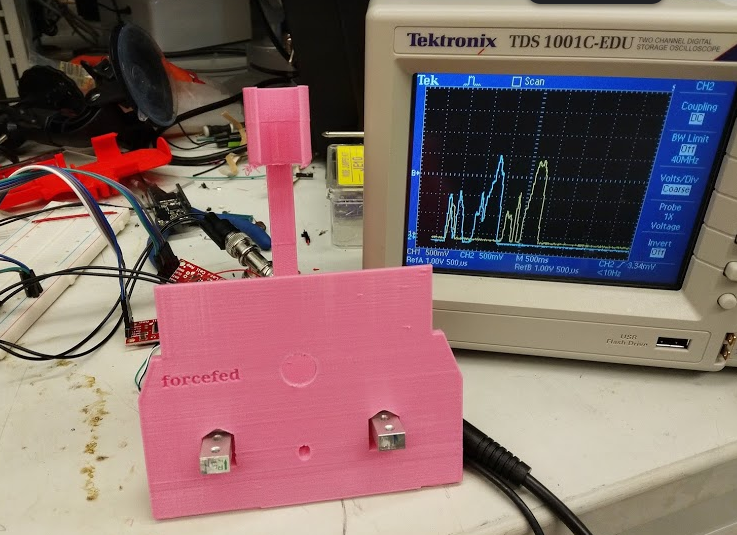
Hi Dan - I changed the youtube settings to correctly be public now - give the video link a try again to see an example of the device showing force exerted over time!
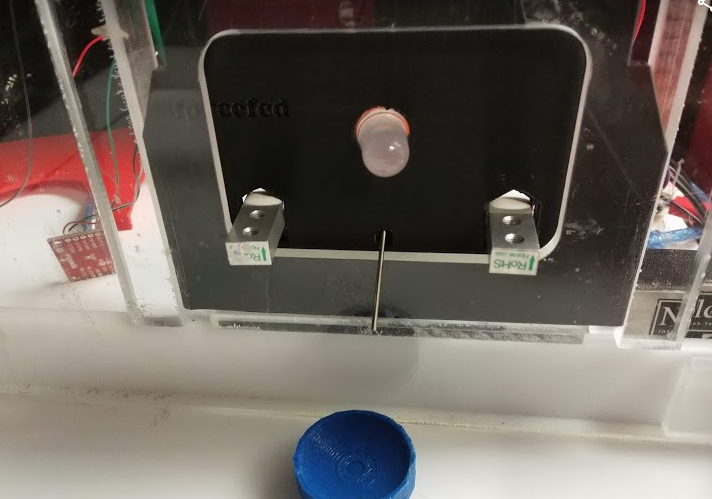
Mike - the 'levers' aren't moving a discernible amount; the term lever probably needs to be updated. They are presenting a rigid outcropping that the mice learn to press. Stay tuned for videos of them interacting with this soon!