 Bud Bennett
Bud BennettAt this point, you need to have the seismometer enclosed and the software and hardware working to produce a measurement of displacement. The undamped pendulum should have a natural period of about 2 seconds. This means that if you perturb the pendulum slightly it should "ring" for a long period of time, like this:
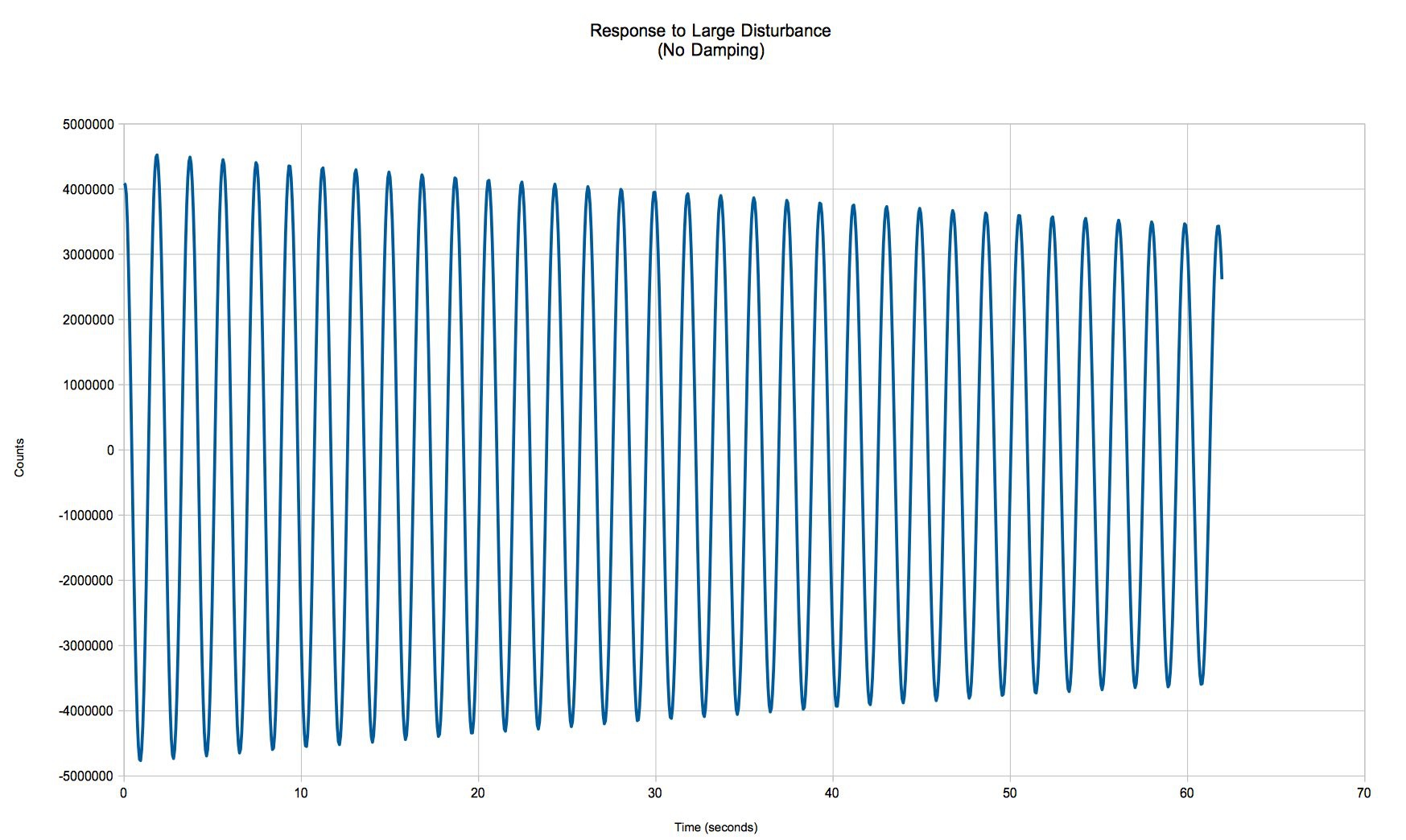 From the above plot, the natural period of my seismometer is 1.875 seconds. The amount of decay over the 60 second measurement is indicative of frictional forces at work.
From the above plot, the natural period of my seismometer is 1.875 seconds. The amount of decay over the 60 second measurement is indicative of frictional forces at work.I referred to my favorite reference article at this point to calibrate the magnetic damping:
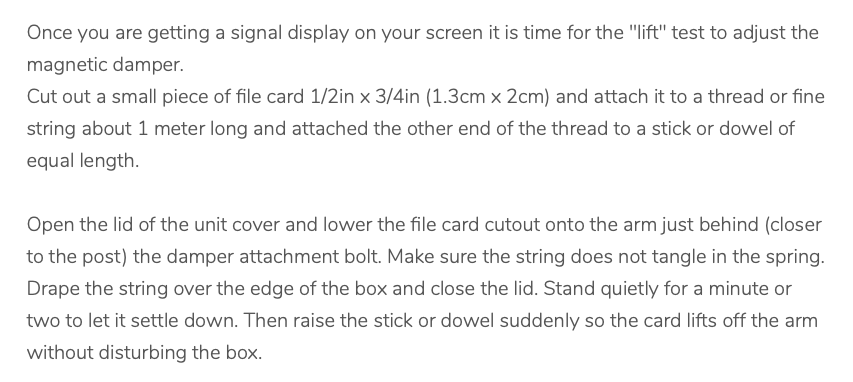
Here's what my test weight looked like when I weighed it:

The thread runs under the peak of the "V" of the paper weight. The feet help to keep it stable for positioning on the boom.
Since this is displacement sensor the response when the weight is lifted from the boom will be a step up in counts -- not a pulse like you would get with a velocity sensor, as per the article. What you are aiming for it something called "critically damped". When you achieve critical damping the frequency response is not peaked and you get a fast settling time from a disturbance. This is the final calibrated response of my seismometer:
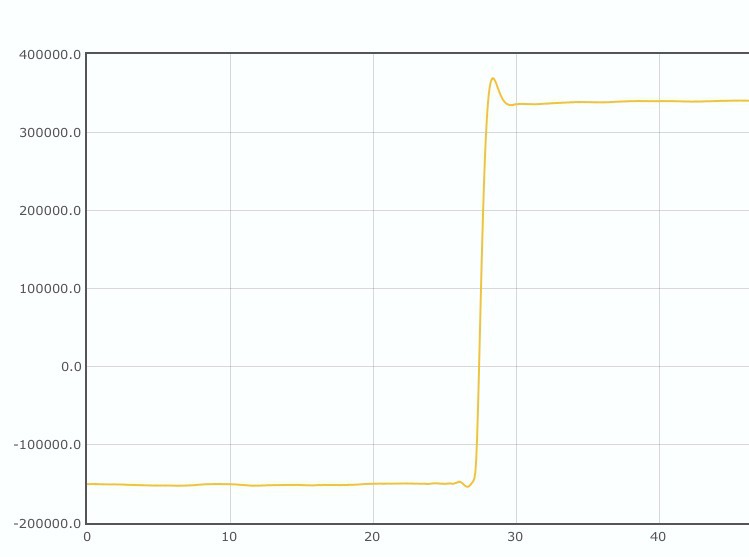
What's amazing is the amount of displacement from such a small difference in mass -- nearly 500,000 counts! Note the small overshoot of the response when the weight is removed. I believe it is about 8% of the step height, which yields the same 12:1 overshoot ratio as the reference article. You change the response by moving the magnet frame to cover more or less of the damping blade until you run out of time or patience (just kidding.) But it is a slow process that you only have to perform once.
After I was satisfied with the response I dribbled some epoxy against the base of the magnet frame (without moving it) to hold it in place.
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.