 Max.K
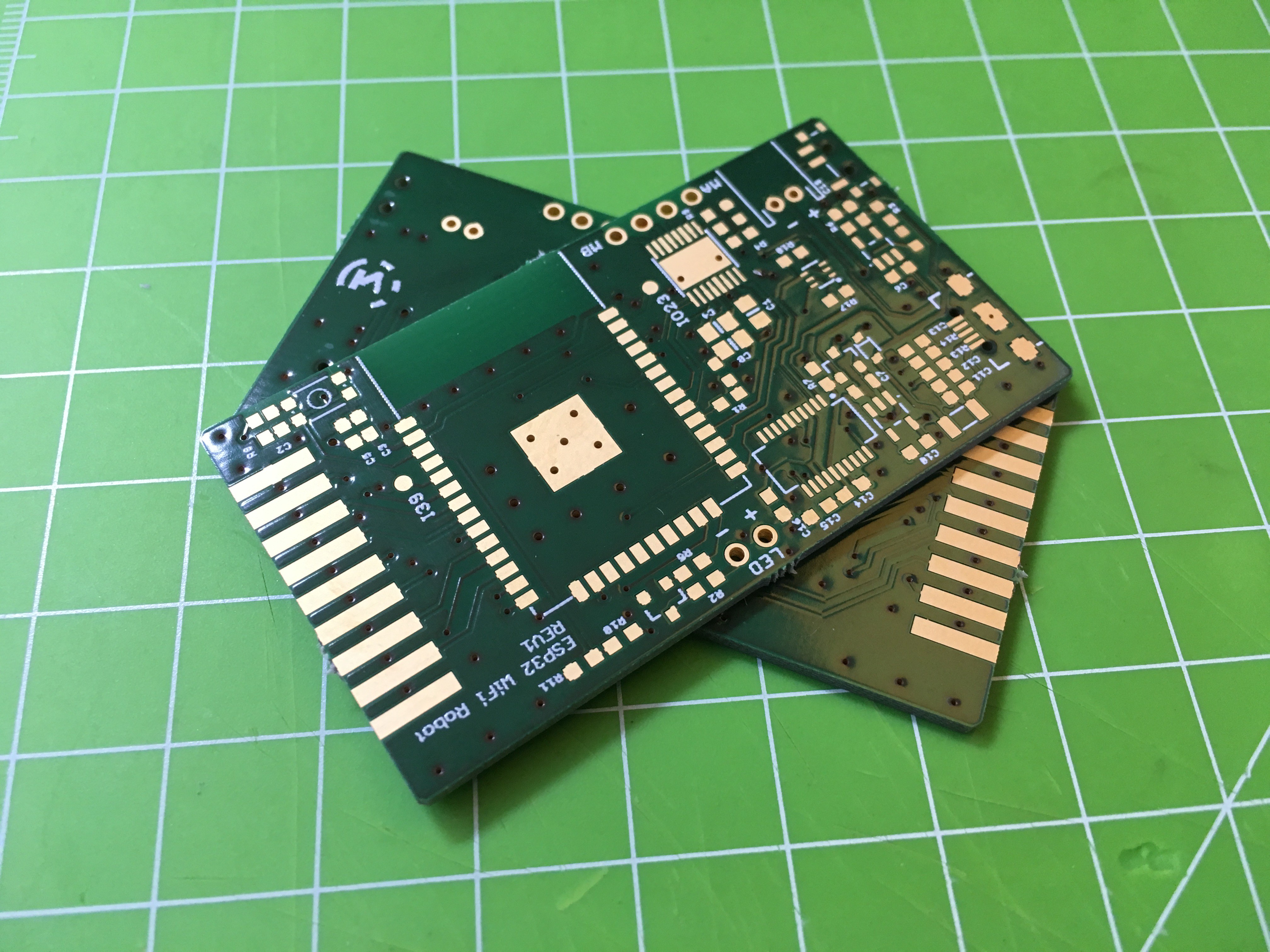
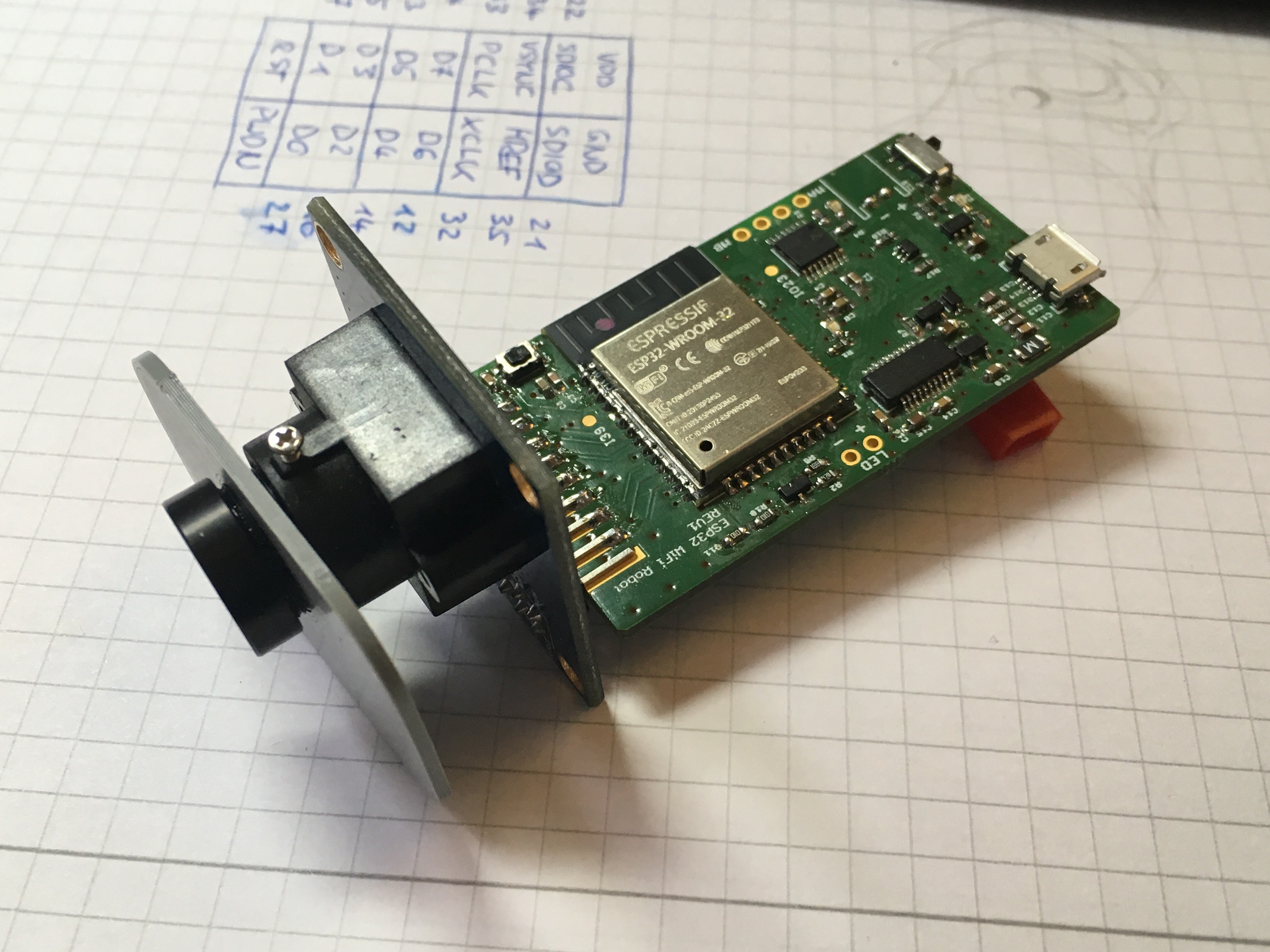
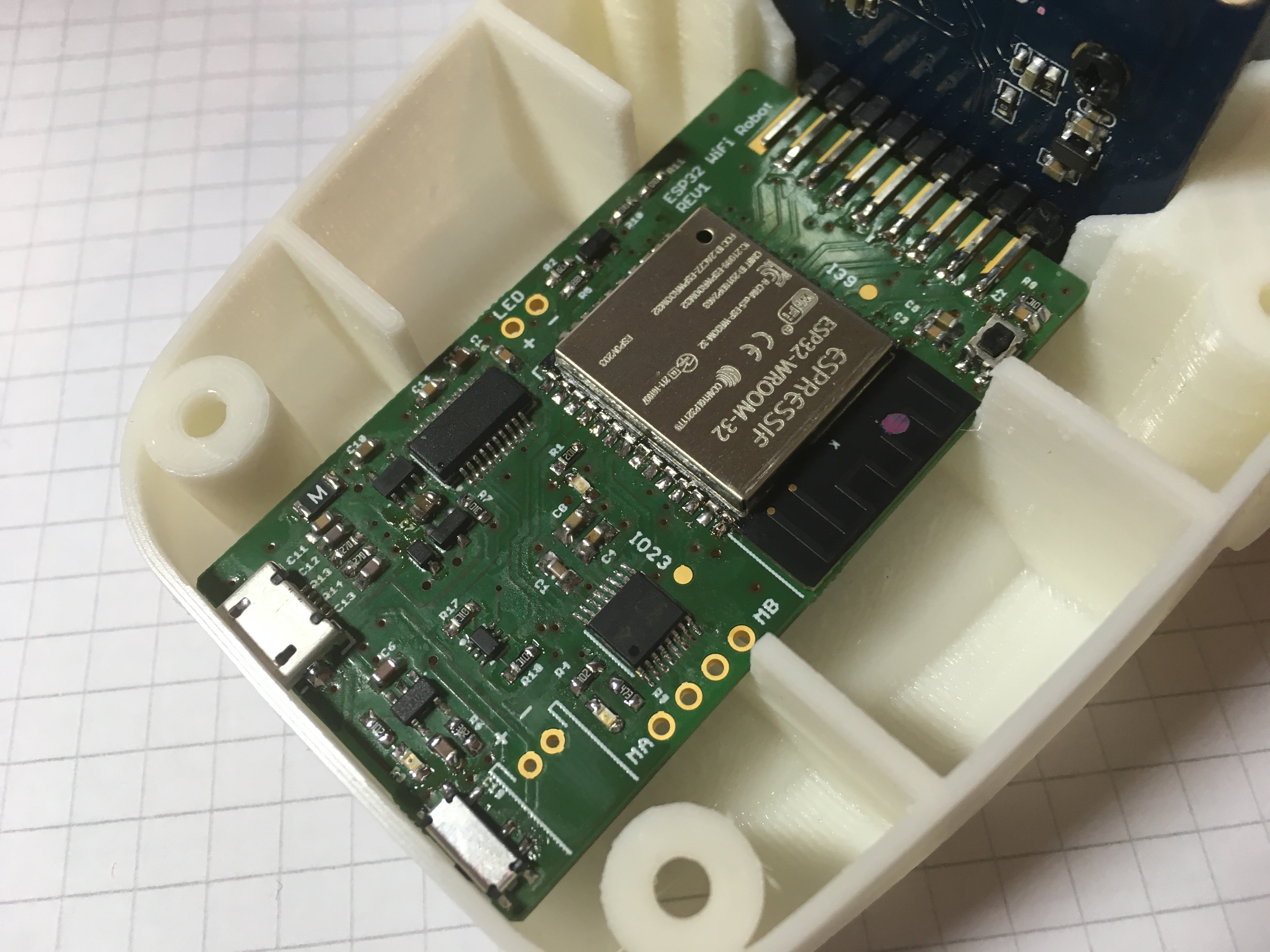
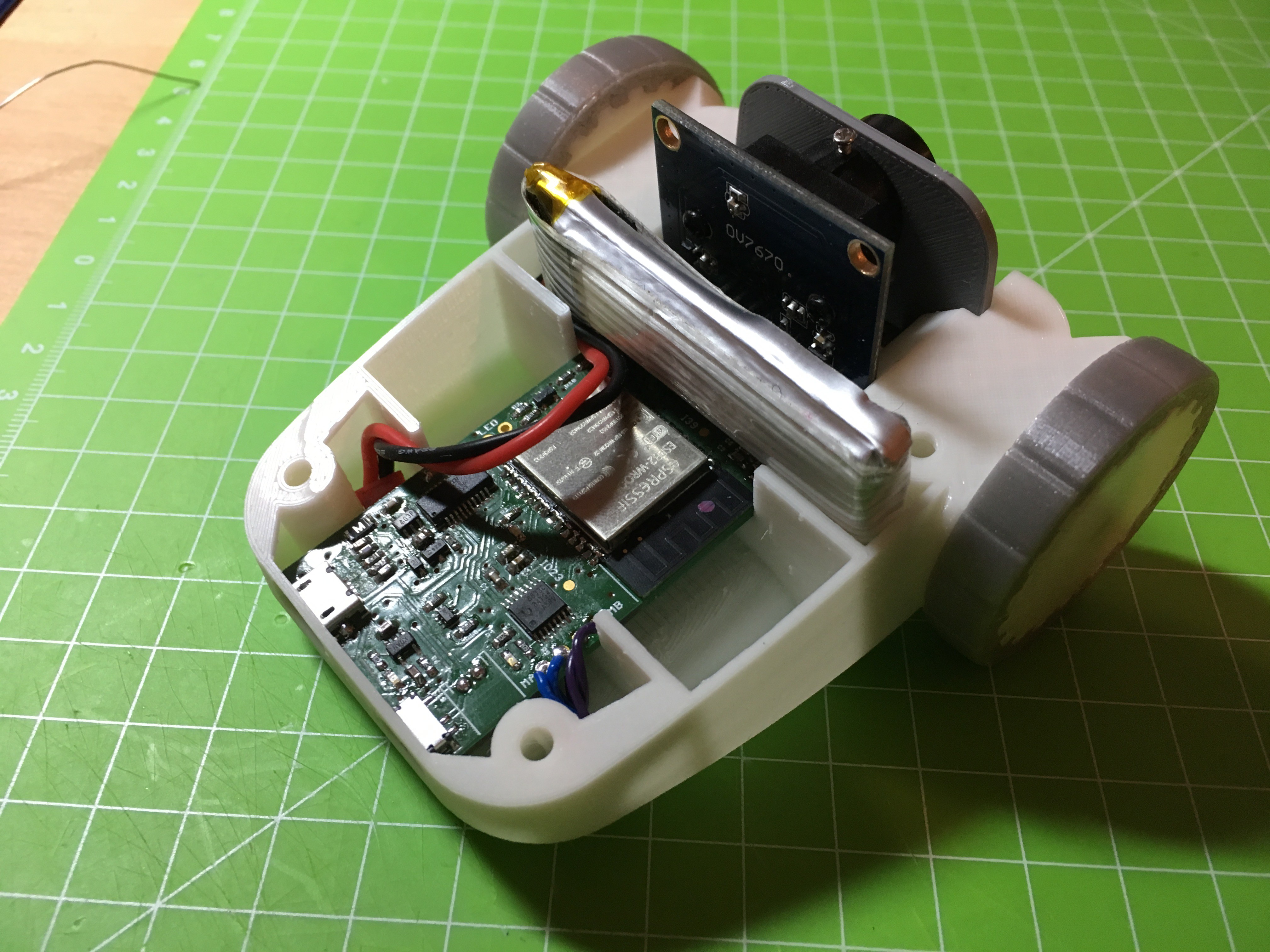
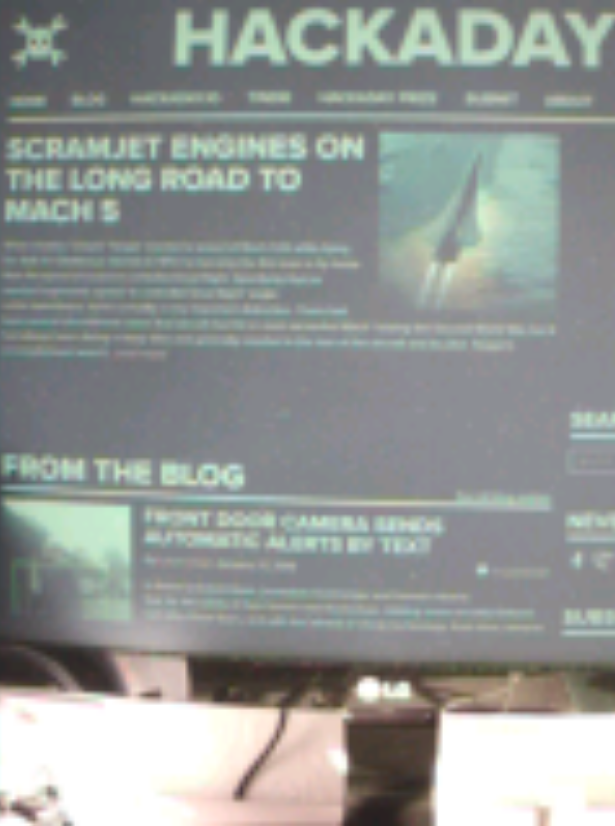
Max.KThe ESP32 requires no app, it can be controlled from any PC or mobile device that has a web browser. Unlike with other browser based robots, the web interface uses a virtual analog stick, which works accurately with any touchscreen or mouse. Even keyboard input is accepted. The streaming resolution can be considered potato-quality at 160x120px. It still surpasses the Gameboy camera and has 8-bit color. The robot can be used in access point mode or it can connect to an existing WiFi router. A single cell LiPo battery powers the robot and can be recharged from a micro USB port, which is also used to program the ESP32. Additional features include temperature and battery voltage monitoring and a bright LED output. To make the robot as compact as possible, the components are soldered to a custom PCB.
If you are interested in this robot and want to build it yourself, be warned that the development is not 100% complete. The Zerobot (Pro) might be a better beginners project.




 Husarion
Husarion
 Rodolfo
Rodolfo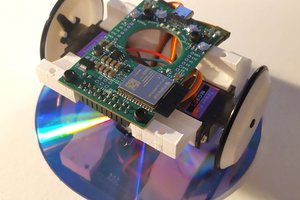
 Krzysztof Pochwała
Krzysztof Pochwała
 Emmanuel
Emmanuel
You can purchase the motors you got slightly cheaper and without shipping cost from Aliexpress: https://www.aliexpress.com/item/DC-3V-6V-12V-N20-Mini-Micro-Metal-Gear-Motor-with-Gearwheel-DC-Motors-15-30/32956400217.html However, they note the speed in RPM and do not mention gear ratio...