The project has pretty much been on hold since March, but last week I finally found some time to finalize this new prototype. This time around Landbeest is going IoT with an onboard Raspberry Pi Zero. I can ssh into it and call Python functions for different movement sequences. Here's the video:
The plan is to eventually put the 3d model up on Thingiverse. To that end I've mainly focused on making the model sturdier and easier to print and assemble. There's no longer any need for gluing parts together—all pieces are now either snap-fit or uses screws. I've also put little notches on the sides of snap-fit parts that indicates what they should attach to. (I tend to forget that myself.)

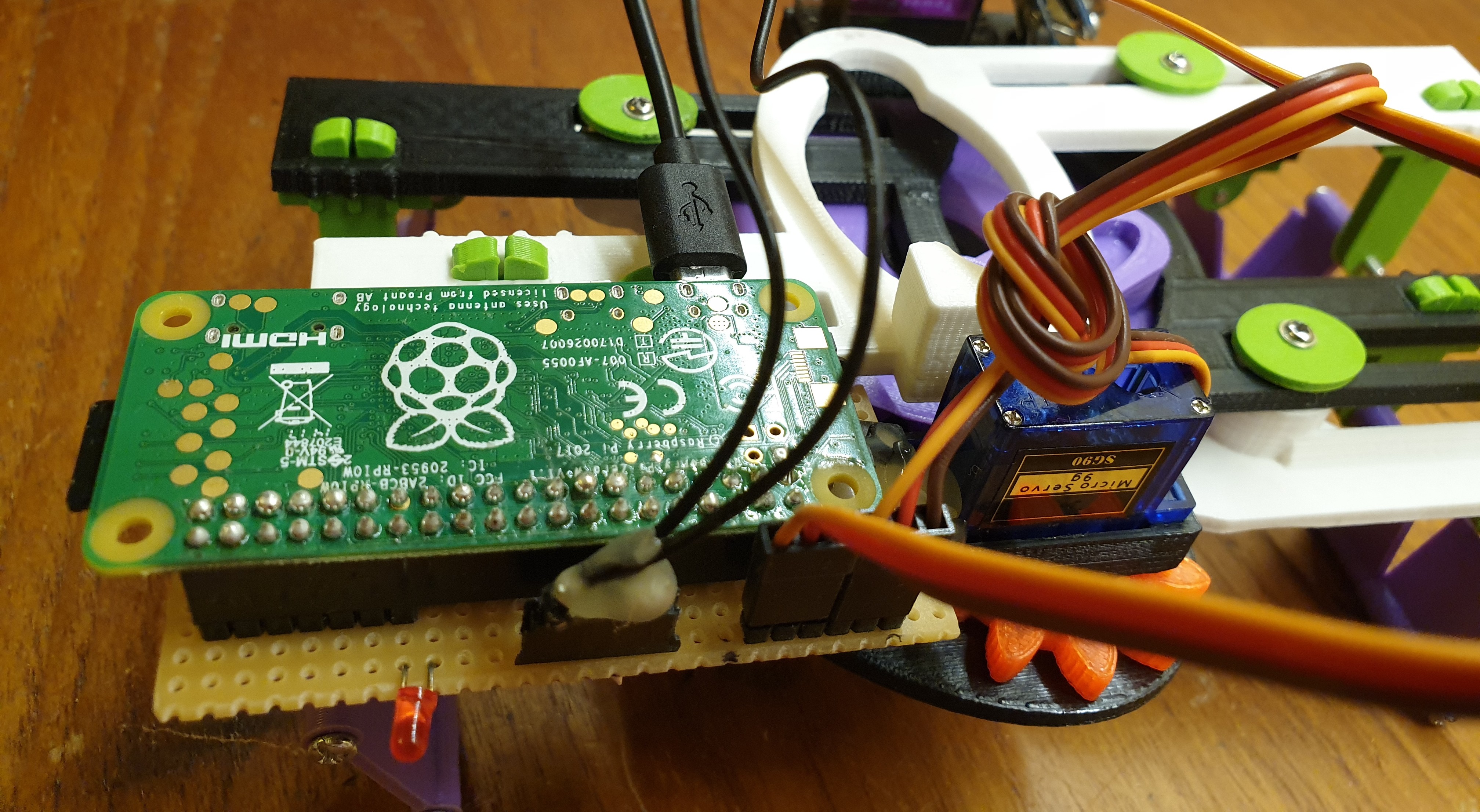
.On earlier prototypes I hadn't attempted to make the robot selfcontained with onboard battery and electronics. I just used a wire harness with an Arduino Uno for controlling it. Making this prototype teatherless was pretty much an afterthought. I just hotglued a PCB with the RPi and servo drive components to one side. The PCB holds a little leaf switch (top right in next image) that lets the RPi know when the drive gear has completed a revolution.
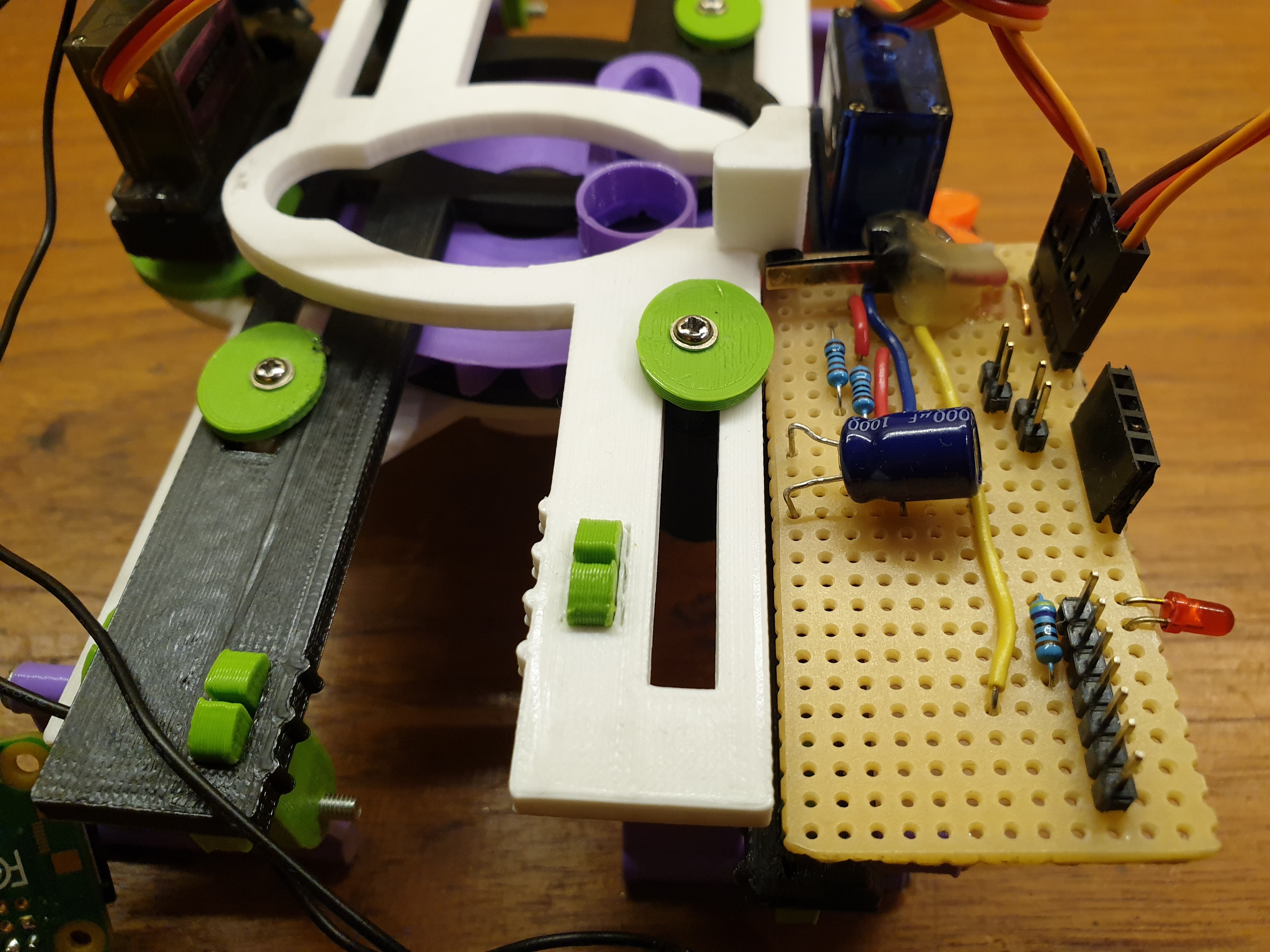
I found running Python on RPi to be a bit less responsive than an Arduino when trying to stop the servo in response to the switch closing. So with each revolution the mechanism stutters a bit in order to find its proper position.
Below the PCB has been connected with the RPi and power supply cable for the servos.
I should really start thinking about modifying the design to have a proper platform for fitting electronics onto. There's basically two options:
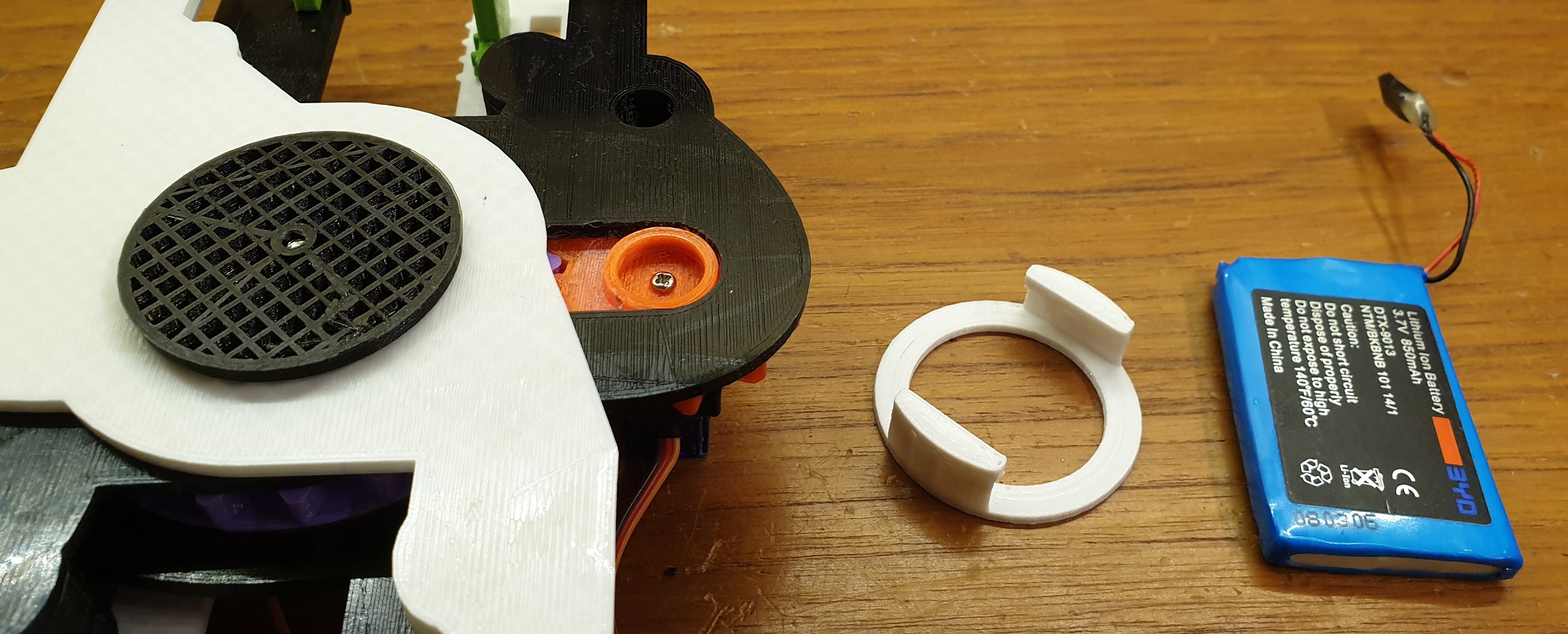
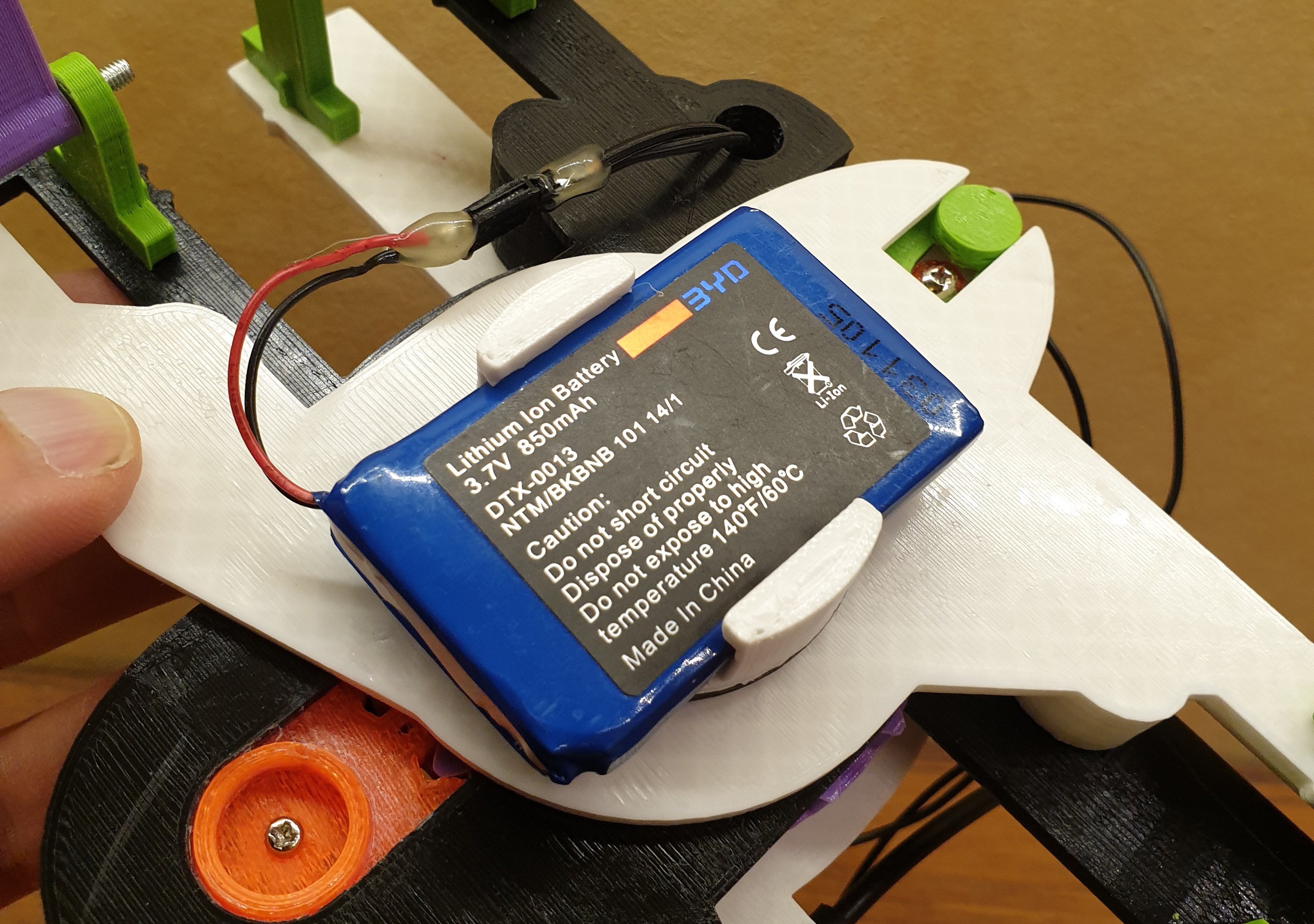
- The battery currently attaches to the pivot on the bots undercarriage. If the legs where a bit taller I could fit a larger container on that spot for housing all of the electronics. Sort of like the gondola on an airship.
- The other option is to have a detachable platform hovering on top of the robot.
I like the gondola option best, except the legs would interfere with any distance sensor you might want to fit there. I'll need to think it through before deciding which way to go.
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.