 Paul Gould
Paul GouldLast year I started a new, light 3D printed quadruped using cycloidal gearboxes. It now needs a tail.
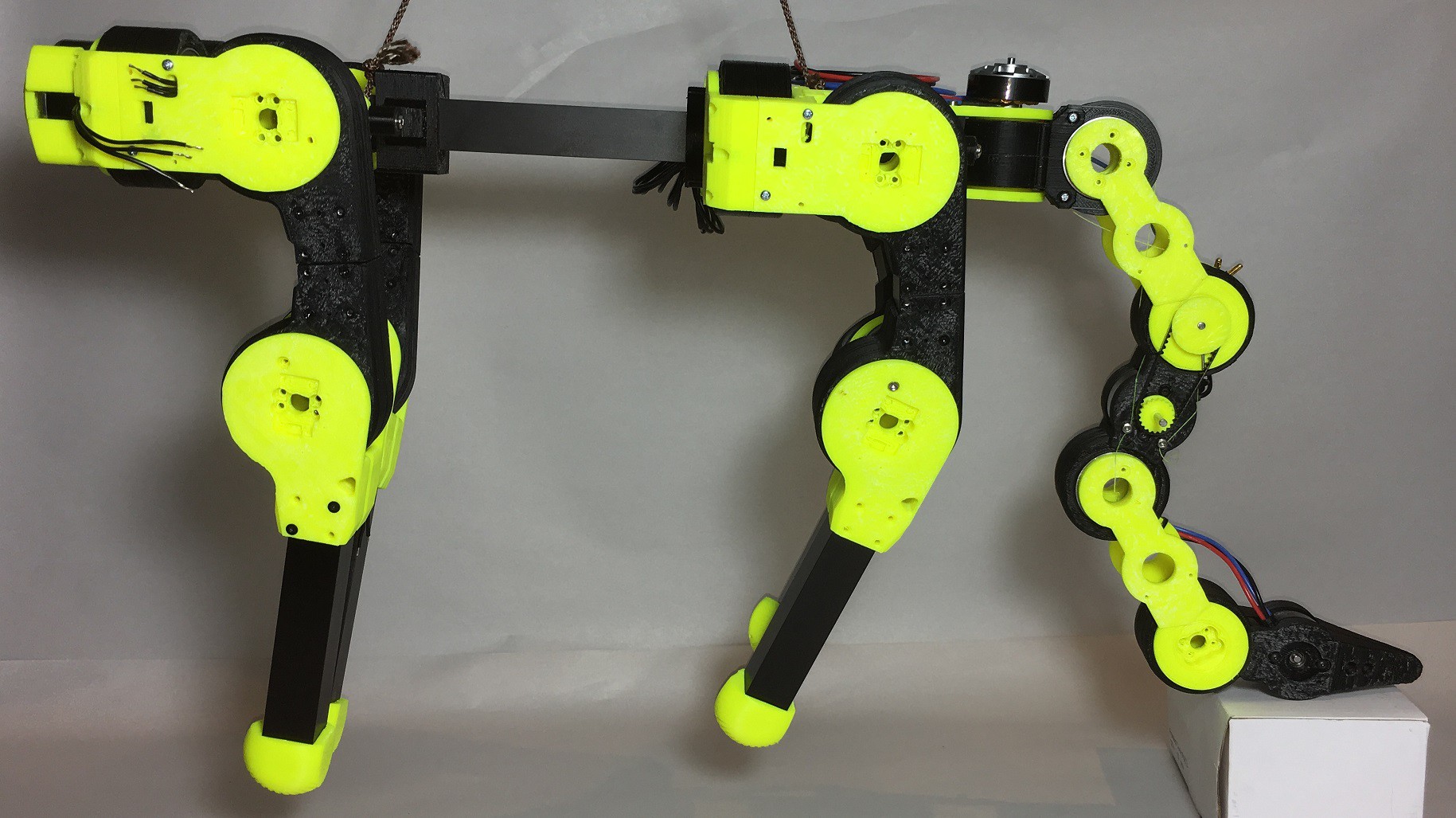
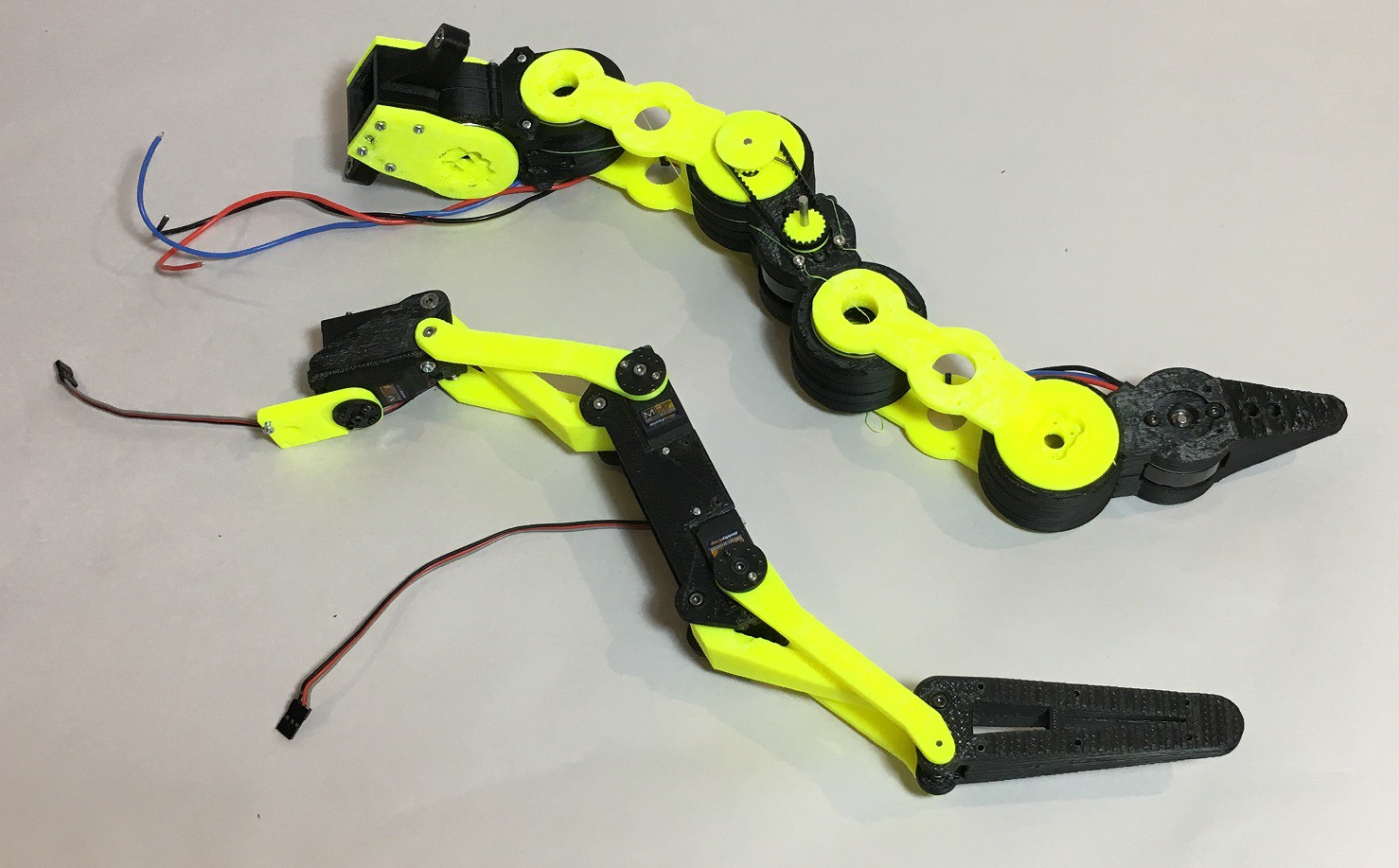
The first design was based around standard RC servos but it was a bit boring. Does there need to be a good reason??? It was a bit slow, lacked torque and had a limited range of motion. Servos were HK47360TM.
My 3D printer is an very cheap i3 clone. It has an enclosure and a ported extraction system. I print only in cheap ABS, with a raft, on a perforated board. So removing the prints from the bed takes a long time.
The tail is not finished but it seemed time to share the design in the "3D Printed Gears, Pulleys, and Cams Contest". The cycloidal gearbox has been proved in the previous project but this time the roll pins has been replaced with 3D printed parts. This reduced the number of parts by half and take ten times less to make. Bearings are still used to handle the torque. Cycloidal gearboxes are great at sharing the torque across multiple "teeth" and "rollers".
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.