 Paul Gould
Paul GouldThree motors
Three Controllers
Three Magnetic Absolute Encoders
Five Joints
1Kg
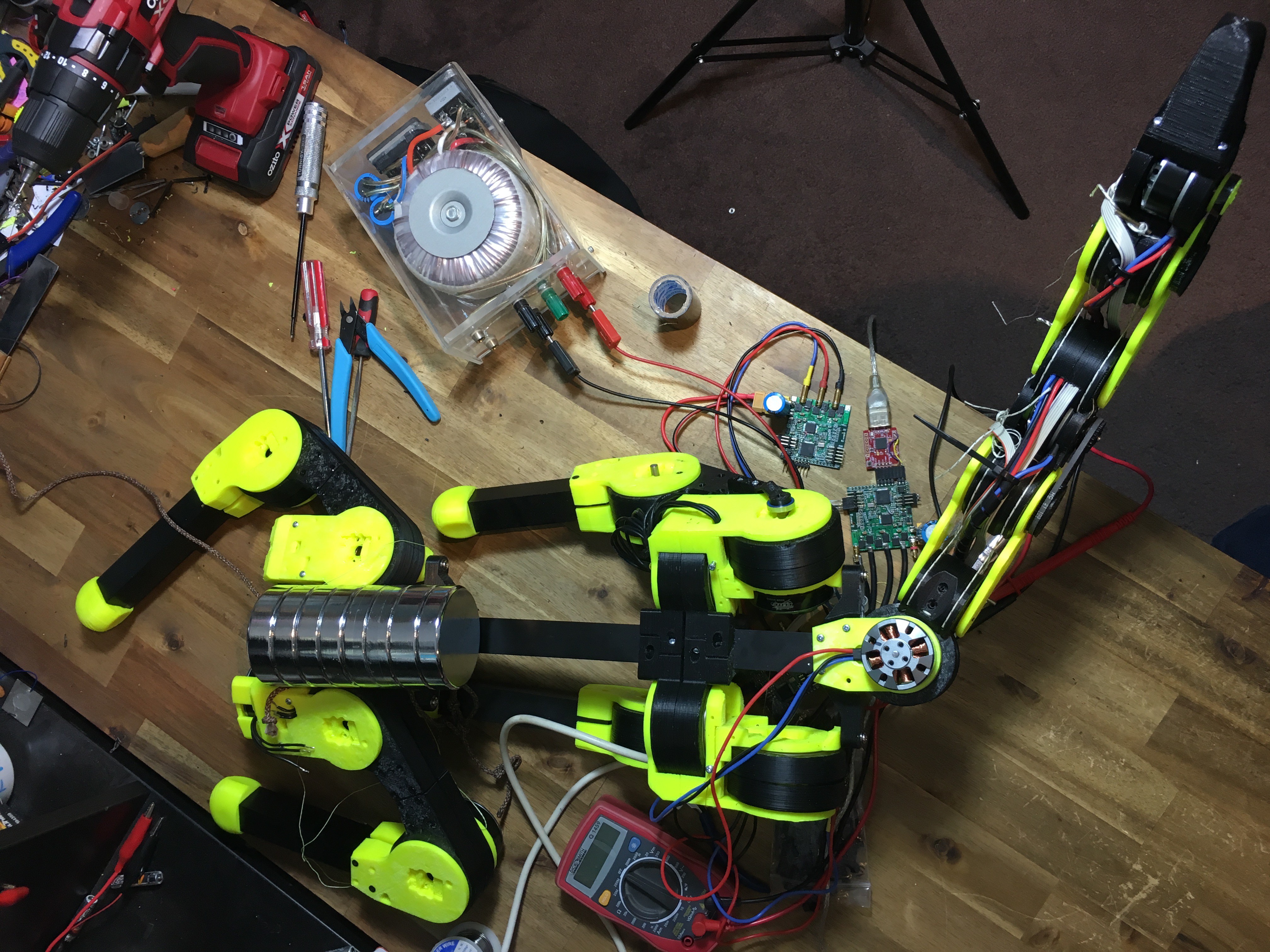
Motion Control is next
A project log for Low Cost 3D printed Robot Tail
Cycloidal gearbox, brushless motors and Timing Pulleys
Three motors
Three Controllers
Three Magnetic Absolute Encoders
Five Joints
1Kg
Motion Control is next
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.
I remove the standard shaft. Buy 4mm x 300mm silver steel rod from mcjing.com.au and cut it to size. Then I file a small flat spot and press fit the shaft in the bell with my vice and tighten up the bell's grub/set screw. Not very precise but the speeds are not that high.
Are you sure? yes | no
Thanks!
Are you sure? yes | no
Hello, the brushless motors you use, these have a long shaft right? Do you have a link where to find these? Thanks in advance!
Are you sure? yes | no