 Paul Gould
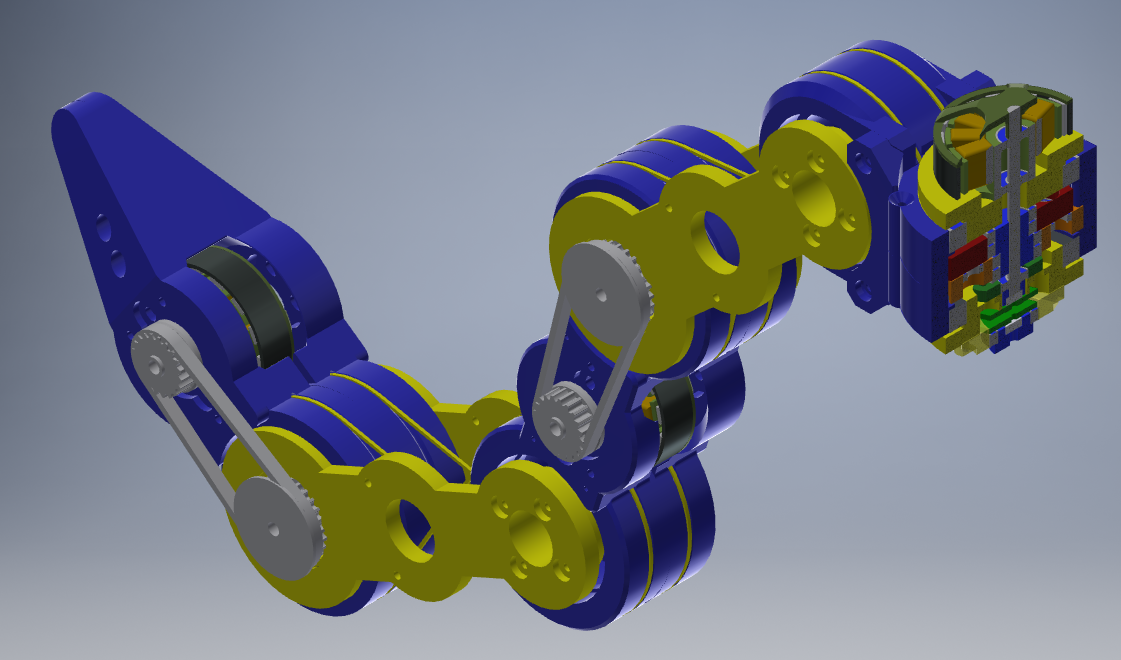
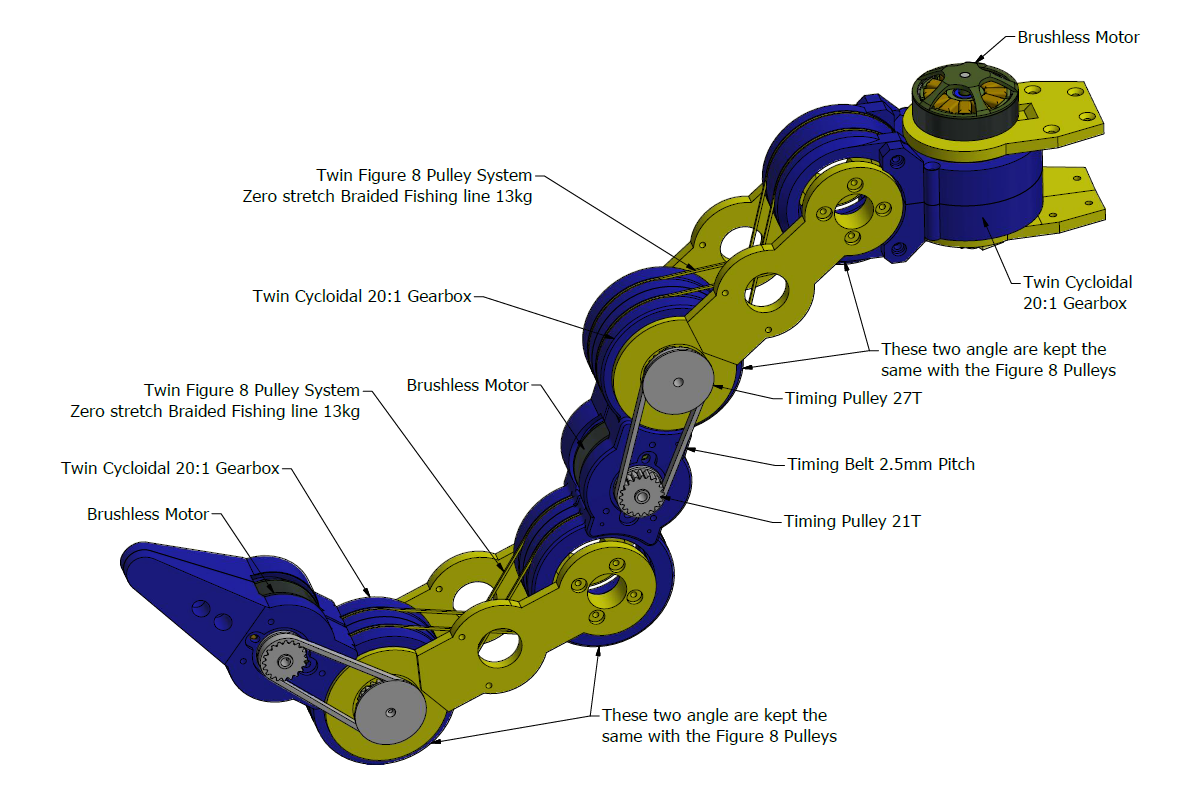
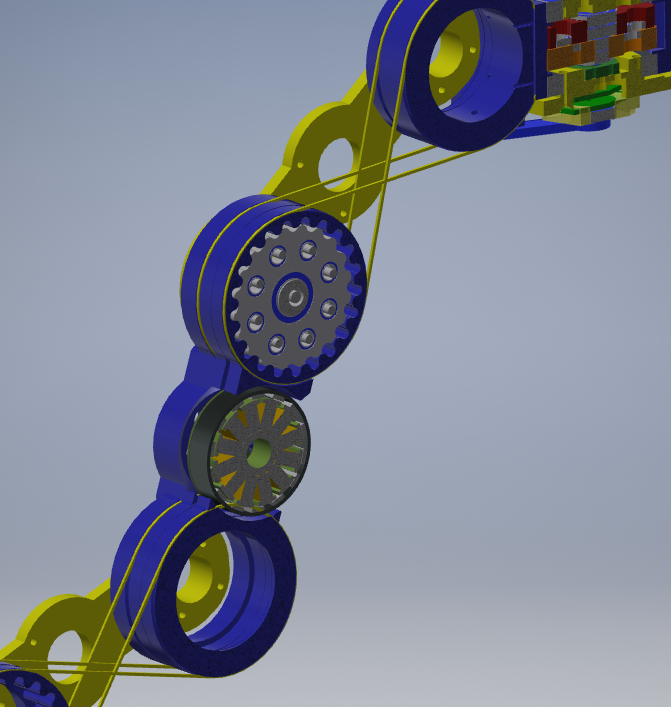
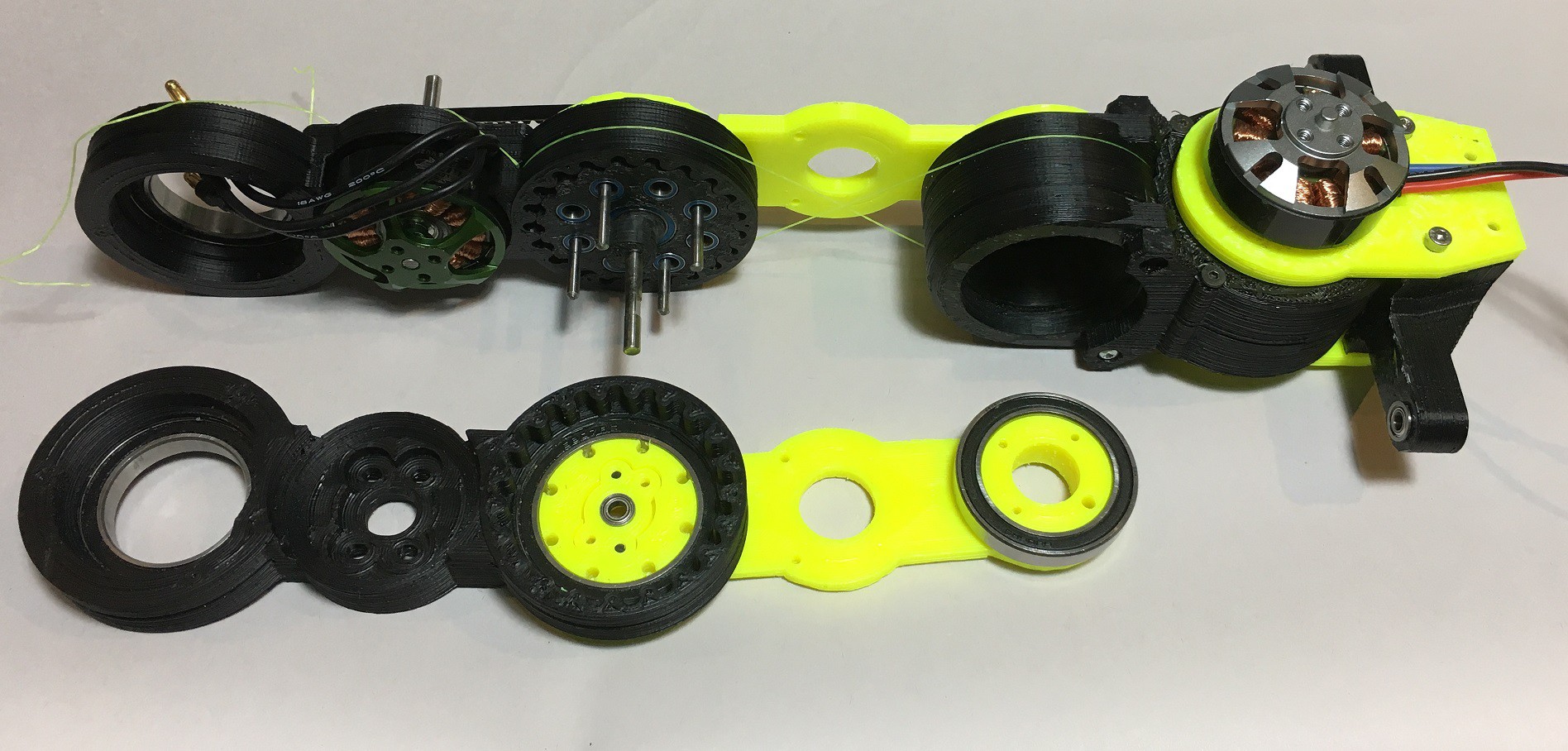
Paul GouldBy linking two joints a smoother range of motion is possible with less actuators. A figure 8 pulley system using braided fishing line matches the angles of two adjacent joints.
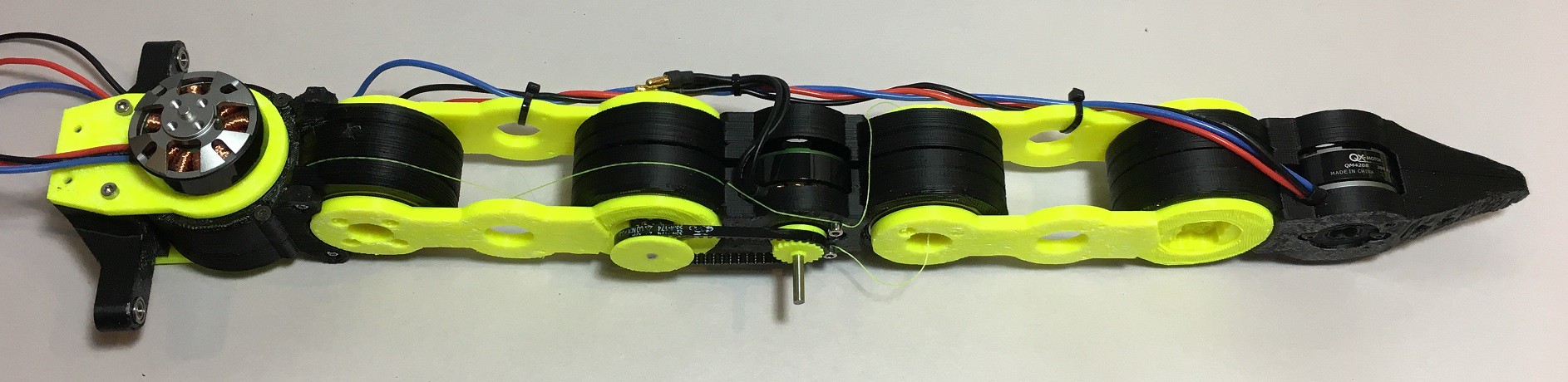
The next step was to make the tail narrower, which meant placing the motor to the side of the cycloidal gearbox and using a timing pulley to transfer the torque. The joint can now be made 55mm wide.


Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.