 Vincent Dankbaar
Vincent DankbaarTo accomplish the goal detailed in the description we had to learn the following:
- How to control a stepper motor (and driver).
- How to use a display.
- How to use the ultrasonic sensor.
- How to write the code for all of these.
We completed the project itself in 8 hours (485 minutes to be exact).
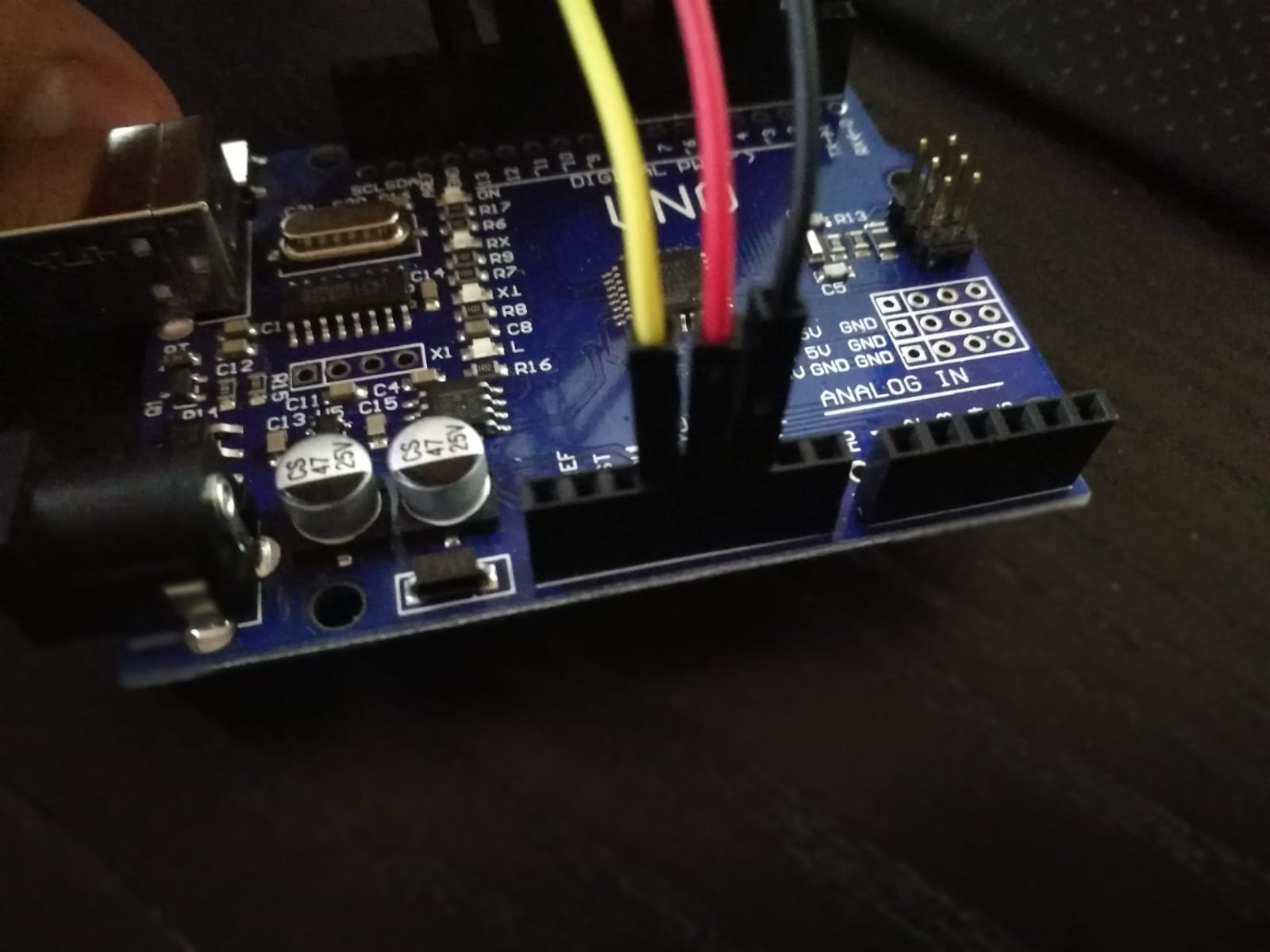
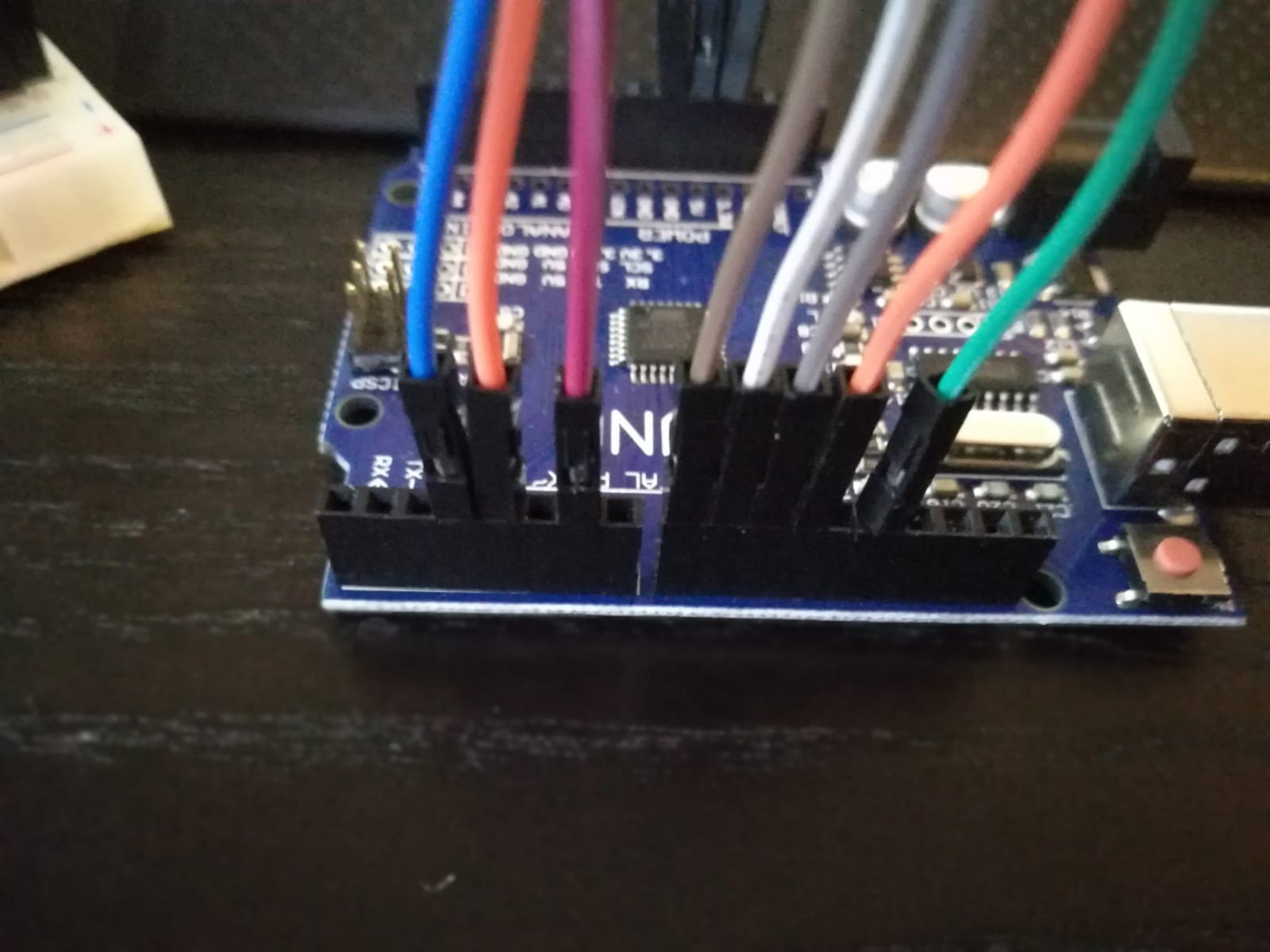
The final pinout on the Arduino Uno:
Clips made while doing this project:
In the end the distance measurements taken by the ultrasonic sensor left much to be desired but by doing multiple measurements for each step I was able to get the precision to a point where I was happy with the result.
 electronicsworkshops
electronicsworkshops
 Arnov Sharma
Arnov Sharma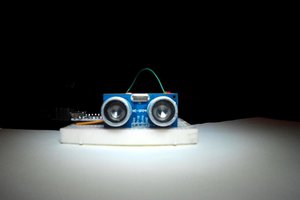
 ken.do
ken.do
 Hari Wiguna
Hari Wiguna