0%
0%
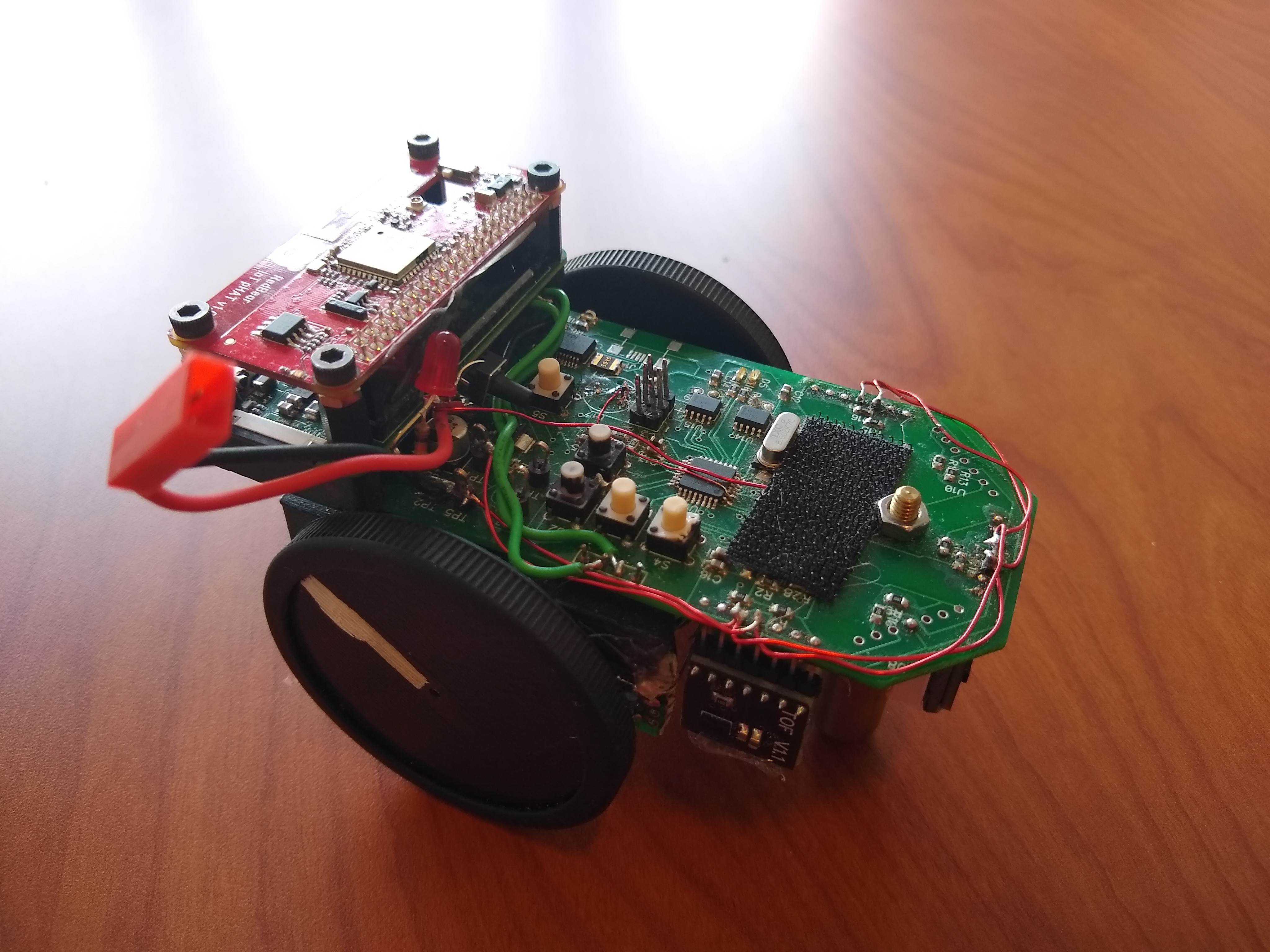
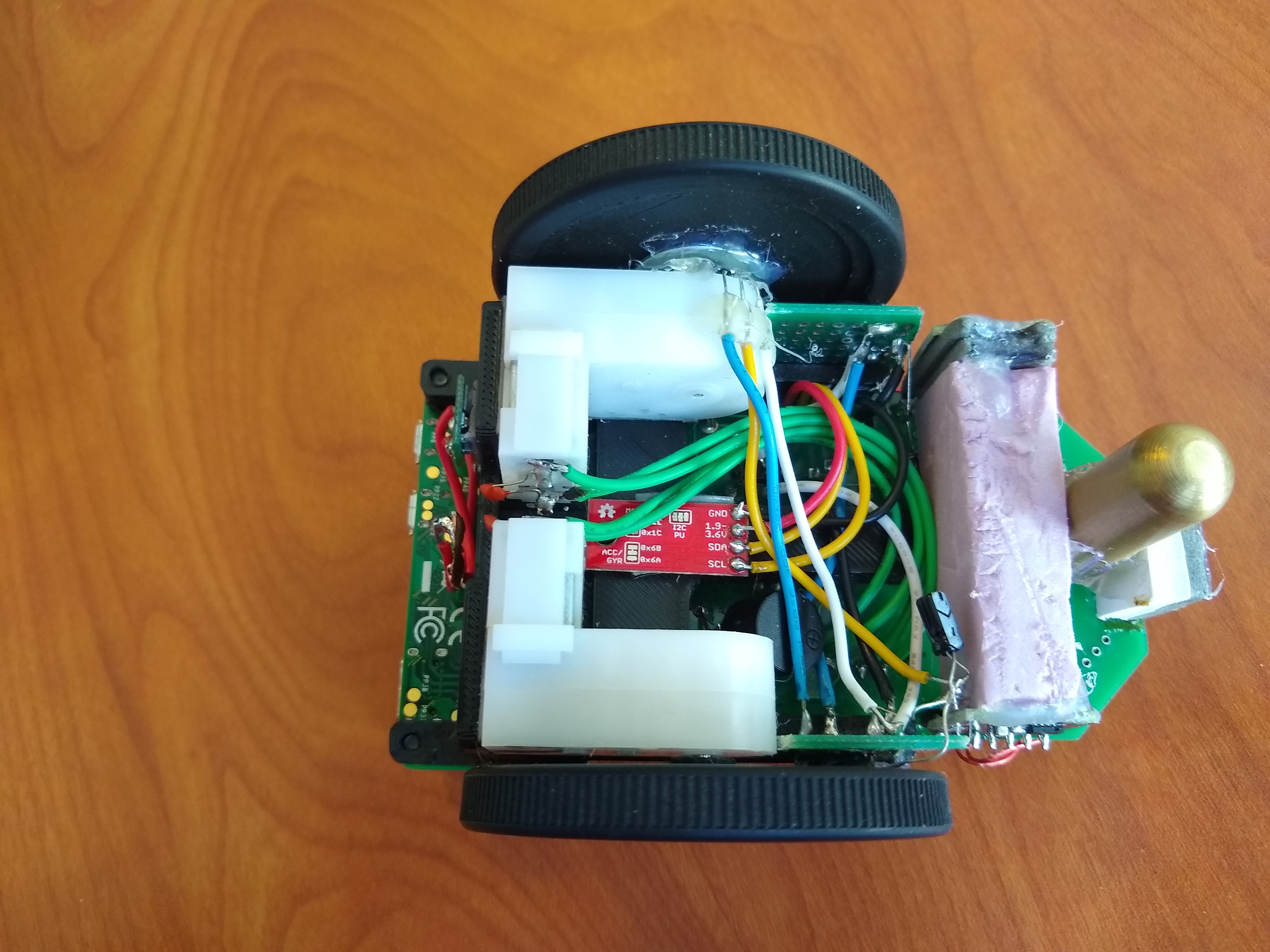
Micro Mouse Robot V2
This robot is designed to compete in the Micro Mouse competition. This is a robotic maze solving challenge.
 Spencer
SpencerBecome a Hackaday.io member
Already have an account? Log in.
Just one more thing
To make the experience fit your profile, pick a username and tell us what interests you.
Pick an awesome username
hackaday.io/
Your profile's URL: hackaday.io/username. Max 25 alphanumeric characters.
Pick a few interests
Projects that share your interests
People that share your interests


 Ted Huntington
Ted Huntington
 Radu Motisan
Radu Motisan
 Will Donaldson
Will Donaldson
 lbinder
lbinder
I love these maze running robots! Since v1 works, it would be really interesting to see a proof-of-concept for the maze solving. I've done line-followers but never maze solvers and would love to see how you approach it. In my mind, mapping the available routes seems like a difficult problem to solve with rudimentary sensors (rotary encoders, proximity sensors). Have you done any work with turning this data in to reliable route planning?