 Yannick (Gigawipf)
Yannick (Gigawipf)While there are several commercial toy grade FFB steering wheels and some higher end simulator grade producs these are very expensive and and are often not moddable or come with their own expensive ecosystem.
It makes sense to focus this project on a simple open source force feedback interface as this is the part where the community lacks a good and open solution.
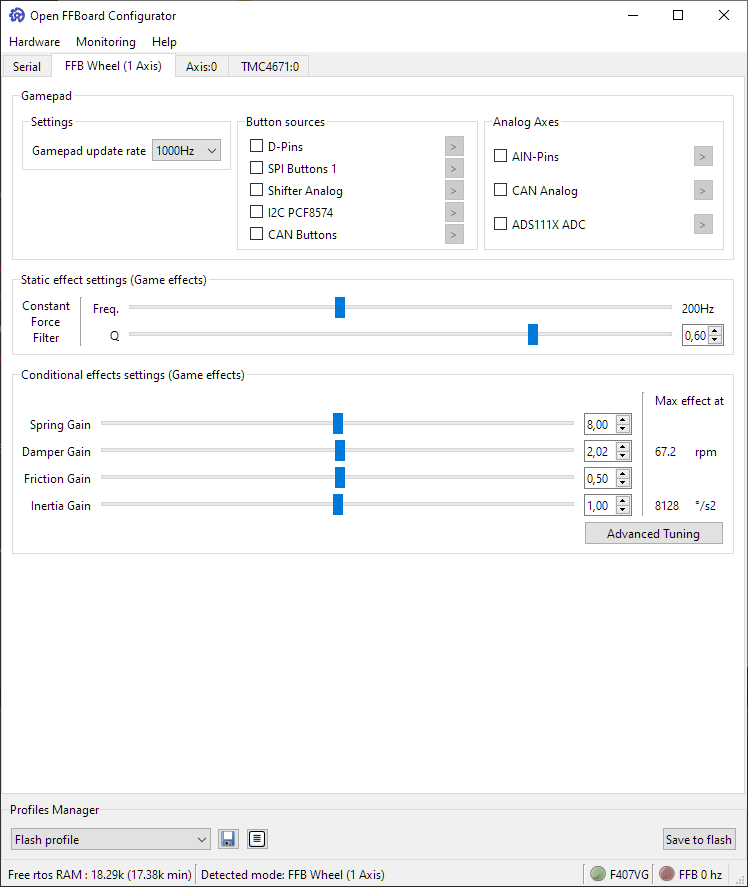
Therefore the main goal will be to develop a universal FFB controller (Open FFBoard).
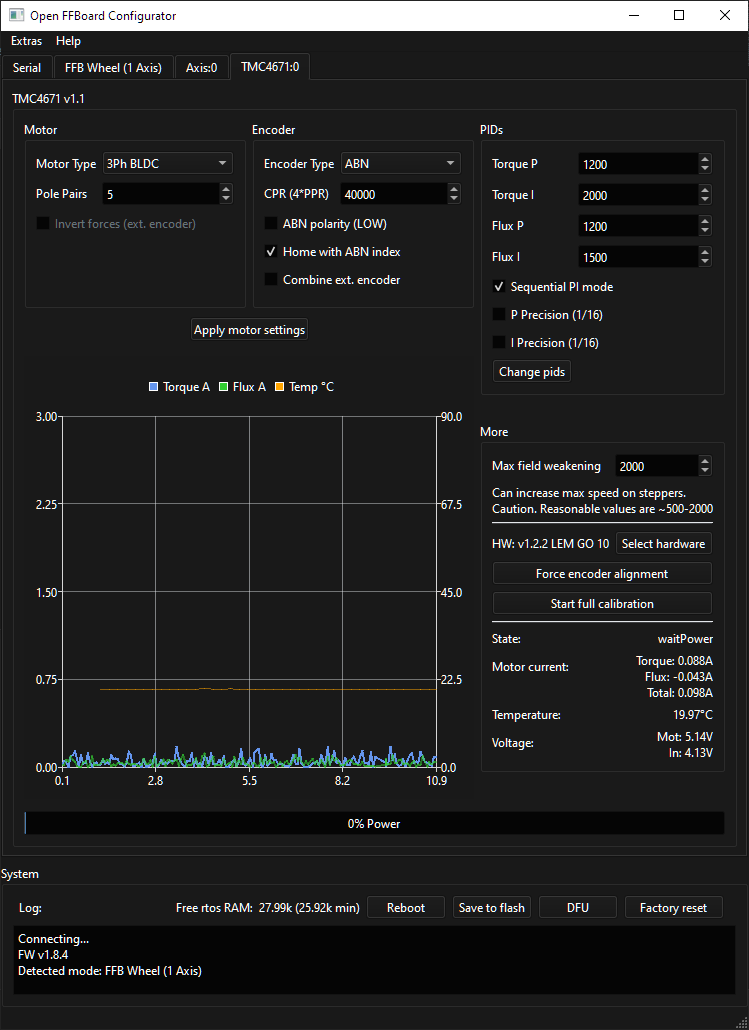
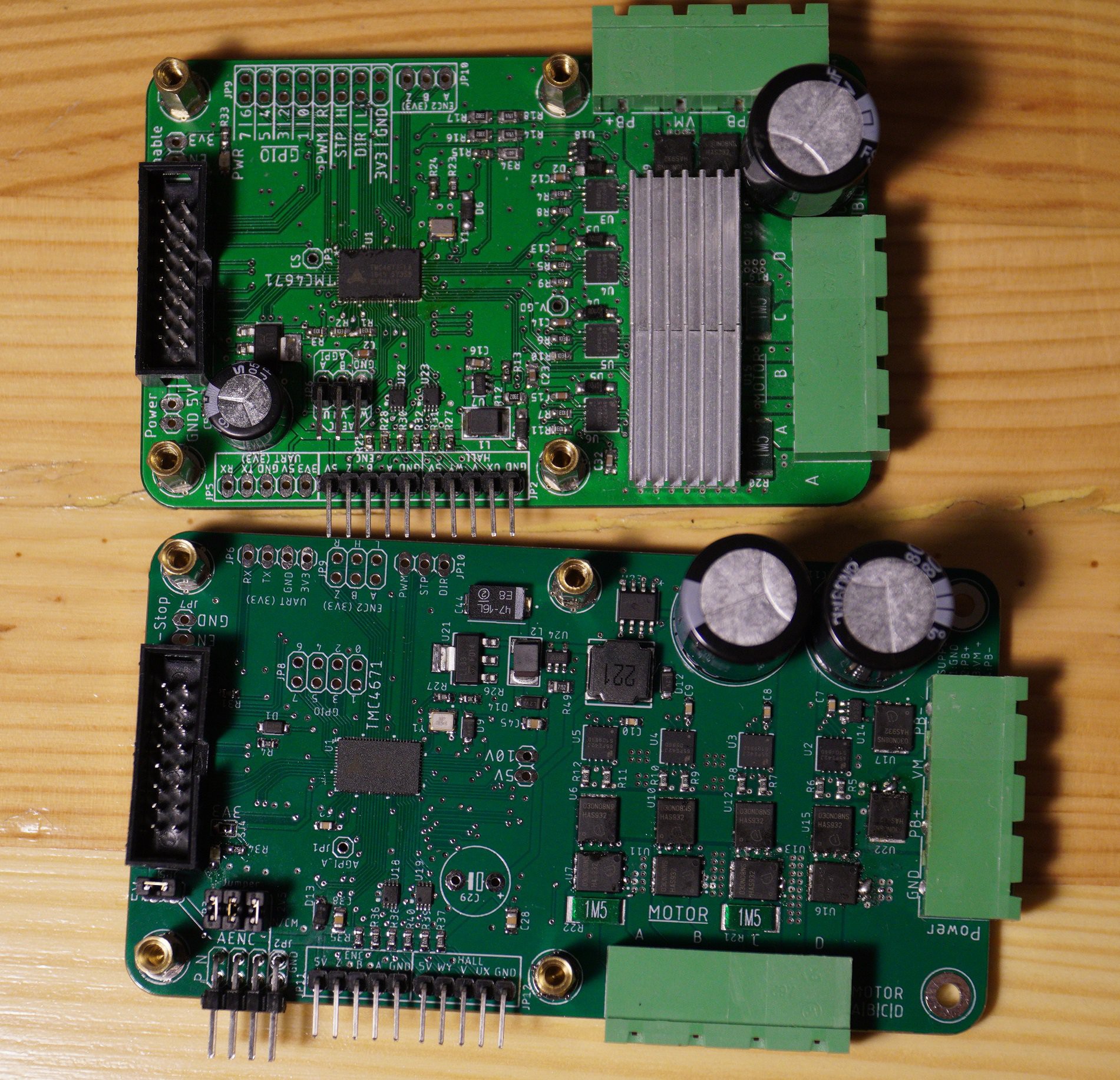
It will provide a modular architecture and interfaces with multiple motor drivers and a reference motor driver board based on the TMC4671.
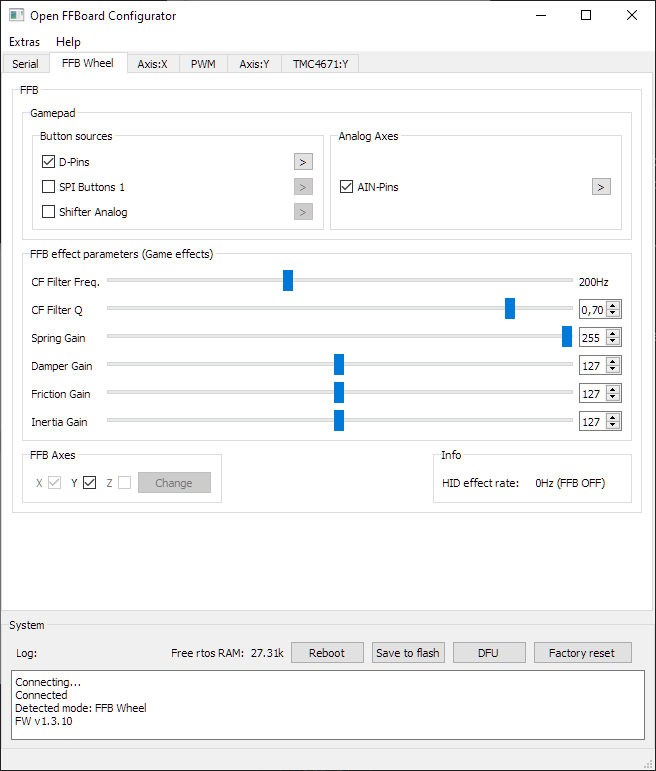
The FFBoard is just an interface for USB HID, encoders, buttons and pedals. It can interface with almost any sensor or motor.
The software is modifiable for different motor drivers and control outputs.
Also supports 2 axis joysticks with the ODrive.
Currently supported motor drivers:
- FFBoard TMC4671
- ODrive (CAN)
- VESC (CAN)
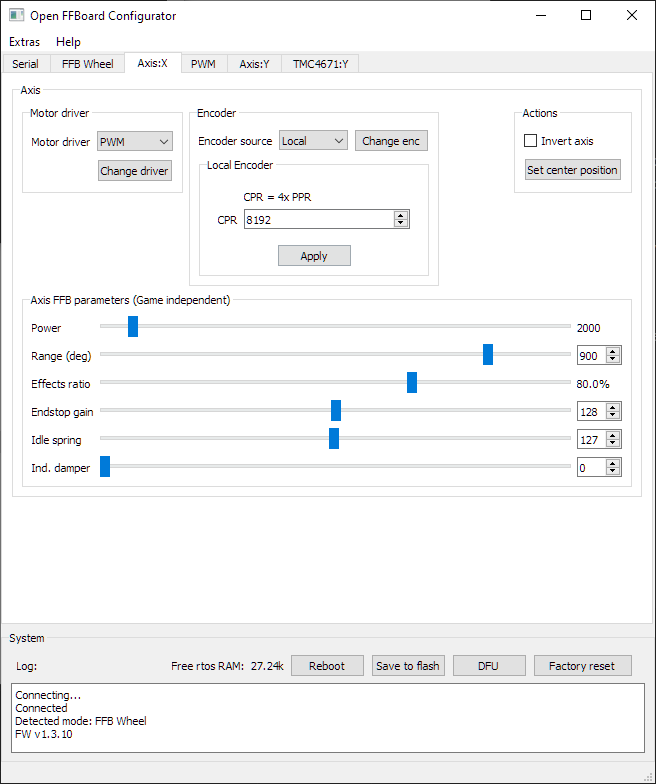
- PWM (centered, pwm+dir, RC ppm, dual PWM)
- Granite Simplemotion (Ioni,Argon, original Simucube 1)
Currently supported encoders:
- ABN incremental (PWM)
- BISS-C (PWM, TMC, requires external transceivers to SPI3)
- MT6825 (PWM, TMC)
- Encoders supported by VESC and ODrive
- SinCos (TMC)














 Yannis
Yannis
 Peter Wasilewski
Peter Wasilewski
 Josh Pieper
Josh Pieper
 Christopher Xu
Christopher Xu
Hello Yannick, did you ever got in mind the idea of making a wireless communication capability to it in order to communicate to a wheel like MOZA or Simagic or so wheelbases? I'm just a electronics and SIMRACING enthusiast and I've done my own wheel with FreeJoy, I don't know how difficult it would be but I'm pretty sure that's the only thing your project doesn't have that other commercial wheelbases have. But still, amazing project and keep it up!!