 Bud Bennett
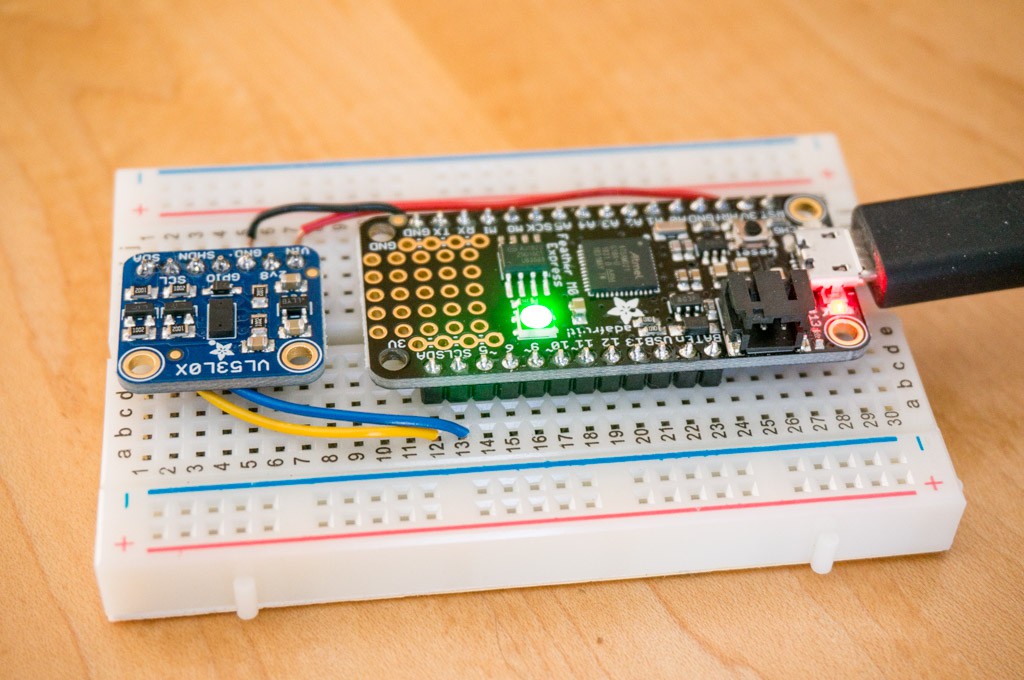
Bud BennettI ordered a VL51L0X sensor breakout board and an Arduino Feather M0 Express from Adafruit. The Feather is attractive to me because of its inherent CircuitPython capabilities. I probably paid the highest prices for these items, but -- considering the support and the initial development of the sensor interface -- it is worth it. Soldering the pins onto the two boards took no time at all. After that I just plugged them into a half proto-board:
 I got into trouble immediately by not being familiar with the Arduino IDE and methodology. I overwrote the existing CircuitPython data with some C code for the VL53L0X. It took me about an hour to get the Arduino to report distance from the sensor. But after that I would have to learn to program in C to go any further. (One of these days I'll learn C.)
I got into trouble immediately by not being familiar with the Arduino IDE and methodology. I overwrote the existing CircuitPython data with some C code for the VL53L0X. It took me about an hour to get the Arduino to report distance from the sensor. But after that I would have to learn to program in C to go any further. (One of these days I'll learn C.)This morning I discovered that there was an existing VL53L0X python library that ran under CircuitPython. I then reinstalled the CircuitPython capabilities and spent an inordinate amount of trial and error time learning to get the simple sensor interface working. I finally got a stream of data out of a terminal program on the iMac.

Anecdotal Data:
The beam width is just as small as the data sheet says -- about ±12°. As the distance to the object increases, the size of the object must increase as well. It would not detect my hand at 800mm but would detect a sheet of 8.5x11 white paper. So it seems that five sensors will be a good starting number to get the required beam width.
Next steps involve learning the sensor command interface, experimenting with time/accuracy tradeoffs, reassigning the sensor's I2C address, and getting familiar with the CircuitPython libraries for GPIO and PWM. I also need perform some experiments with detecting objects of different reflective properties and the sensors resistance to ambient light. Lots of work left.
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.