The instructions and information for this project will be presented as project logs. Information will also be available in the form of files and pictures to aid mechanical and software development. Feel free to ask questions in the discussion and highlight areas where more information is required. The project is being featured at the OER19 conference https://oer19.oerconf.org/news/guest-blog-adding-to-the-open-ecosystem-open-source-hardware-by-beverly-gibbs/
0%
0%
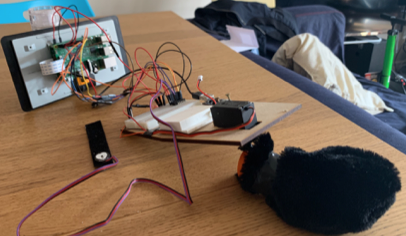
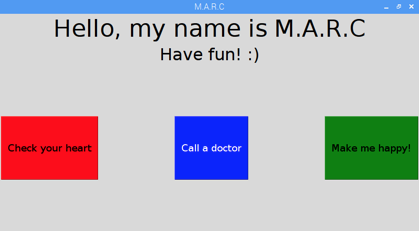
Design and Build a Companion Robot for MS Care
The project aims to design and build a companion robot for aid in primary and secondary progressive Multiple Sclerosis care.
Become a Hackaday.io member
Already have an account? Log in.
Just one more thing
To make the experience fit your profile, pick a username and tell us what interests you.
Pick an awesome username
hackaday.io/
Your profile's URL: hackaday.io/username. Max 25 alphanumeric characters.
Pick a few interests
Projects that share your interests
People that share your interests







 Max.K
Max.K
 rkrishnasanka
rkrishnasanka
 Mauro Pichiliani
Mauro Pichiliani
cool project, can’t wait to see the result!