0%
0%
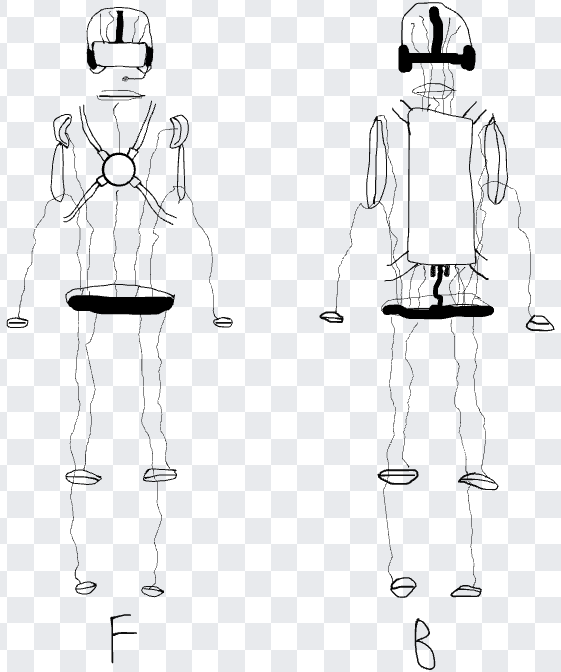
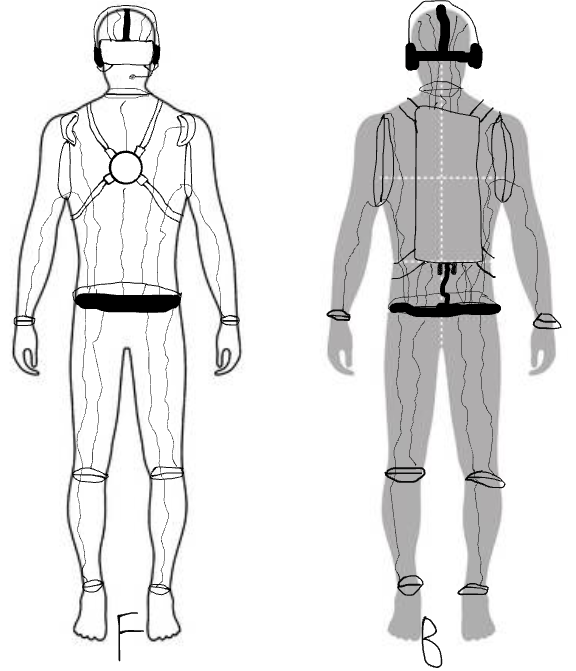
(Exosuit?)/VR Controlled Bot
This is going to be a long and hard project - and a really expensive one too. I'm happy to take you along for the ride!
 Adam Jensen
Adam JensenBecome a Hackaday.io member
Already have an account? Log in.
Just one more thing
To make the experience fit your profile, pick a username and tell us what interests you.
Pick an awesome username
hackaday.io/
Your profile's URL: hackaday.io/username. Max 25 alphanumeric characters.
Pick a few interests
Projects that share your interests
People that share your interests



 Jeff Haag
Jeff Haag
 Peter Victoratos
Peter Victoratos
 Sean S Con
Sean S Con
https://hackaday.io/project/166557-read-rope-electronic-nerve
I made a flexible electronic rope that can tell where a bend was made.
Check it out. I think it would be useful for your project.