 ronald.sutherland
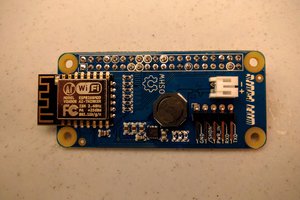
ronald.sutherlandA shield or mezzanine that is used to connect an SBC and my controller board to full-duplex serial using RS485 transceivers. The SBC's serial hardware is connected as a host to communicate with multiple controller targets (if their bus manager connected them). A half-duplex management line is used by the managers. The board has two RJ45 style connectors for use with CAT5 in either the T568A scheme or the T568B scheme.
0%
0%
RPUpi - a shield for tool-chain at network edge
Connects a Raspberry Pi to a serial multi-drop bus.
Become a Hackaday.io member
Already have an account? Log in.
Just one more thing
To make the experience fit your profile, pick a username and tell us what interests you.
Pick an awesome username
hackaday.io/
Your profile's URL: hackaday.io/username. Max 25 alphanumeric characters.
Pick a few interests
Projects that share your interests
People that share your interests







 deʃhipu
deʃhipu
 ajlitt
ajlitt
A major factor in 8Rental's success is its group of committed experts that make sure the business is among the most driven in the sector. https://8rental.com/