 Keion Bisland
Keion Bisland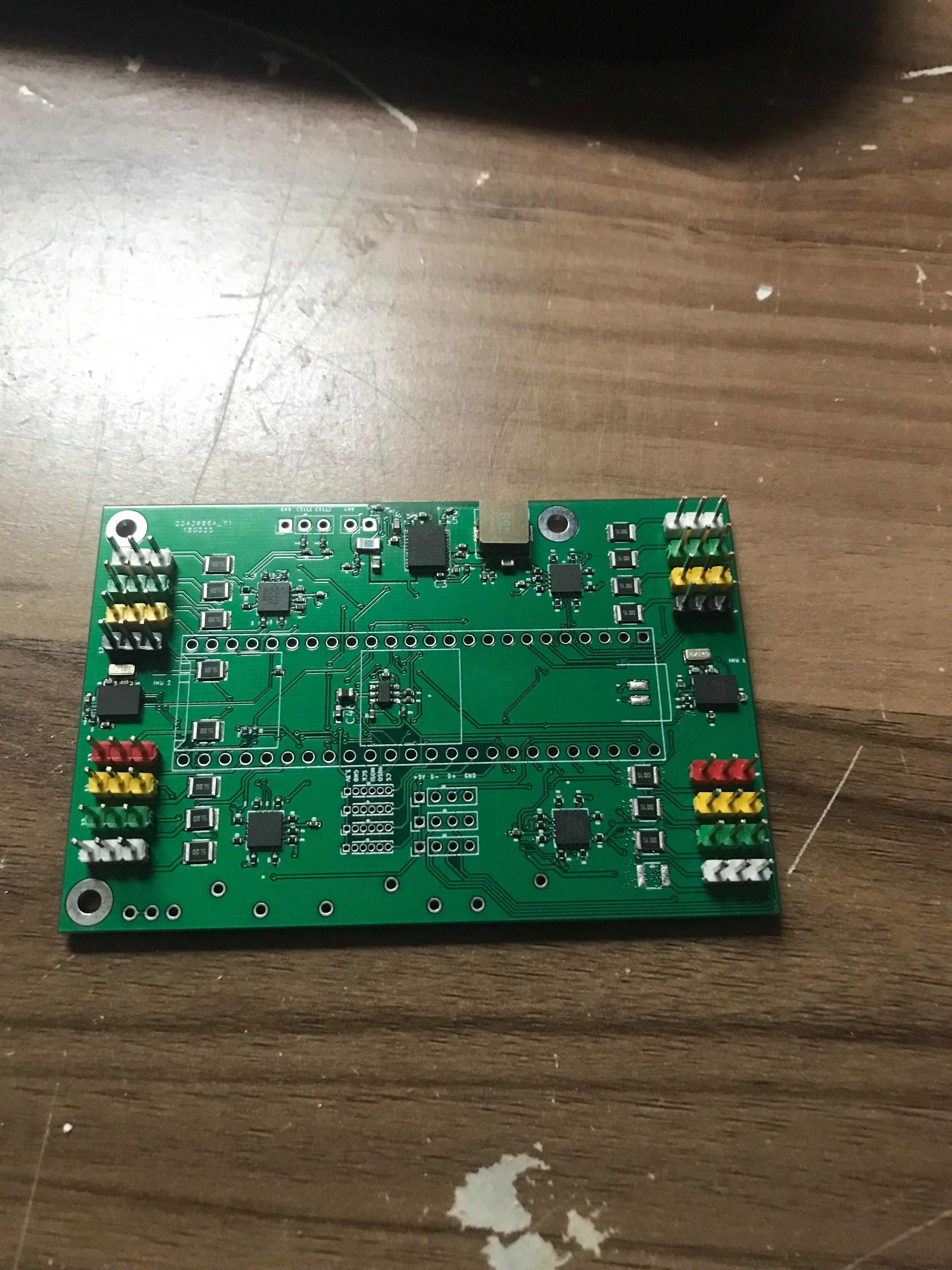
The intention of the first revision of the motherboard was to allow for the most feed back to the controller as possible. It Incorporated 4 i2c current sensors in order to extrapolate the force being applied to each motor, 2 BNO055 9DOf IMUs, a high current switch mode power supply to regulate the battery power to the rated 6V of the servos being used, a low current switch mode power supply to power the Raspberry pi annd Teensy, breakouts to 16 Servos and connections to allow for power and communication between a Teensy 3.5/3.6 and a Raspberry pi 3B+.
Communications between the raspberry pi and the Teensy is done through USB HID at ~500Hz. This allows for the kinematics to be calculates near real time on the Raspberry Pi and sent down stream to the Teensy, The Teensy was used to drive all 16 servos using individual hardware PWM channels, as well as collect IMU and current data from the sensors and reply to the raspberry pi with this information. This information is then used to update the walking gait and kinematics engine.
Despite the validity of the motherboard, a few small issues arose and a revision 2 was done, eliminating a number of sensors and replacing the Teensy. These will be spoken about in motherboard Rev 2.
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.
Good stuff. :)
Are you sure? yes | no