 Keion Bisland
Keion Bisland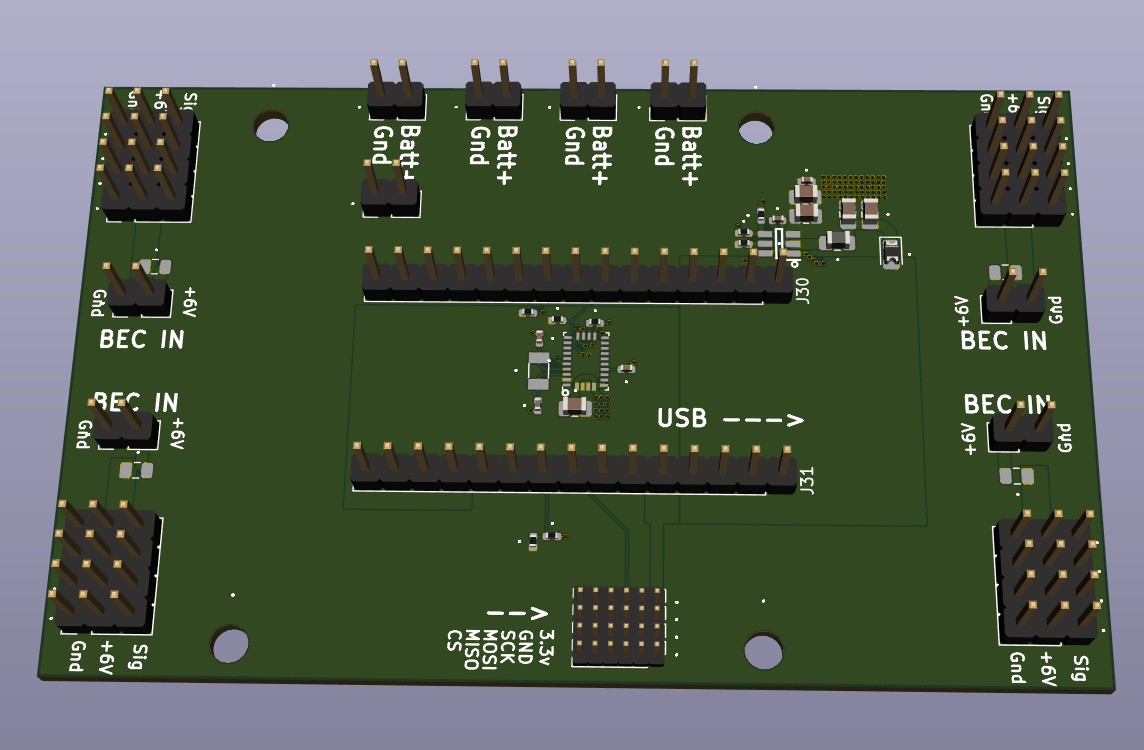
The second revision of the motherboard took everything we learned from the previous revision and fixed all the issues. The number of IMUs was reduced to 1 in the center of the motherboard , The Teensy 3.5/3.6 was replaced with a nucleo-l432kb nucleo-64 development board, A PCA9685BS to drive all 16 servos, off board power regulation for the servos using 4, 4A BECs and fused power plugs for each bank of 4 Servos. The switch mode circuit was improved to as previously inductive spikes from the motors being released from stall would cause damage to the IC, once resulting in it releasing its magic smoke. The correct connections were added to allow for the connection of the foot sensors.
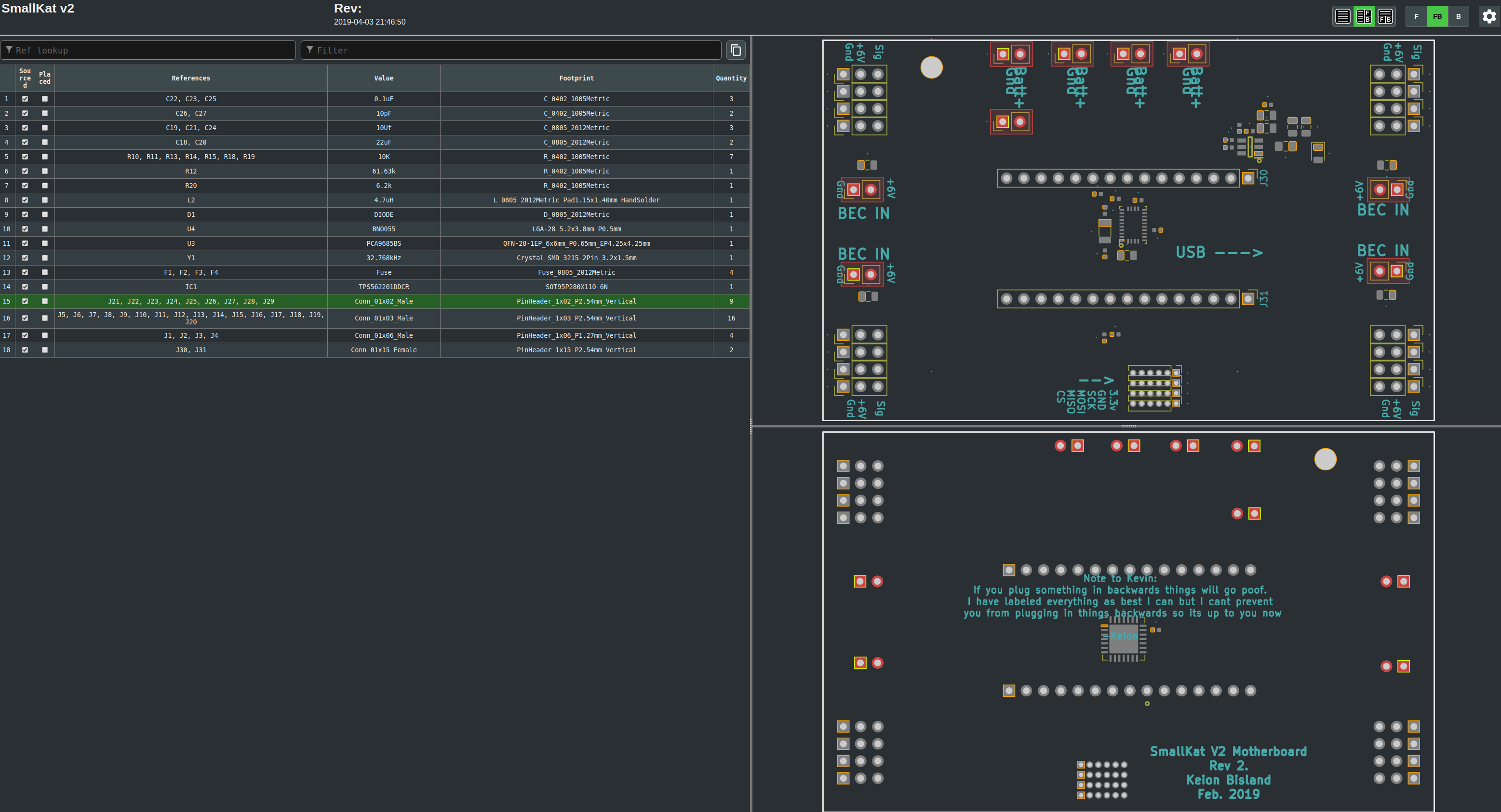
BOM:
The new board is being produces now and this will be updated as testing insures.
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.