Kevin Harrington
Kevin Harrington-
SmallKat Education package availible (Open Courseware)
02/14/2020 at 19:34 • 0 commentsHere is the entire content set of the course materials for teaching SmallKat Dynamic Walking class. For High School teachers, stretch out lab one and 2 for the semester. For College level, teach through the dynamics controller assuming a background in Linear Algebra, single limb kinematics, and basic mobile base kinematics.
Lesson Plan: http://lesson.smallkat.org
Recorded lectures: http://videos.smallkat.org
Results from the first run of the class: http://showcase.smallkat.org
System Documentation: http://docs.smallkat.org
Source Code: http://code.smallkat.org
Purchasing: http://shop.smallkat.org
-
Howto Balance the SmallKat
12/10/2019 at 16:37 • 0 commentsI made a video explaining the math governing the SmallKat's balance control system.
-
SmallKat Math Video!
11/11/2019 at 18:15 • 0 commentsI have posted the video for this weeks lecture on the Math of the SmallKat
![]()
![]()
-
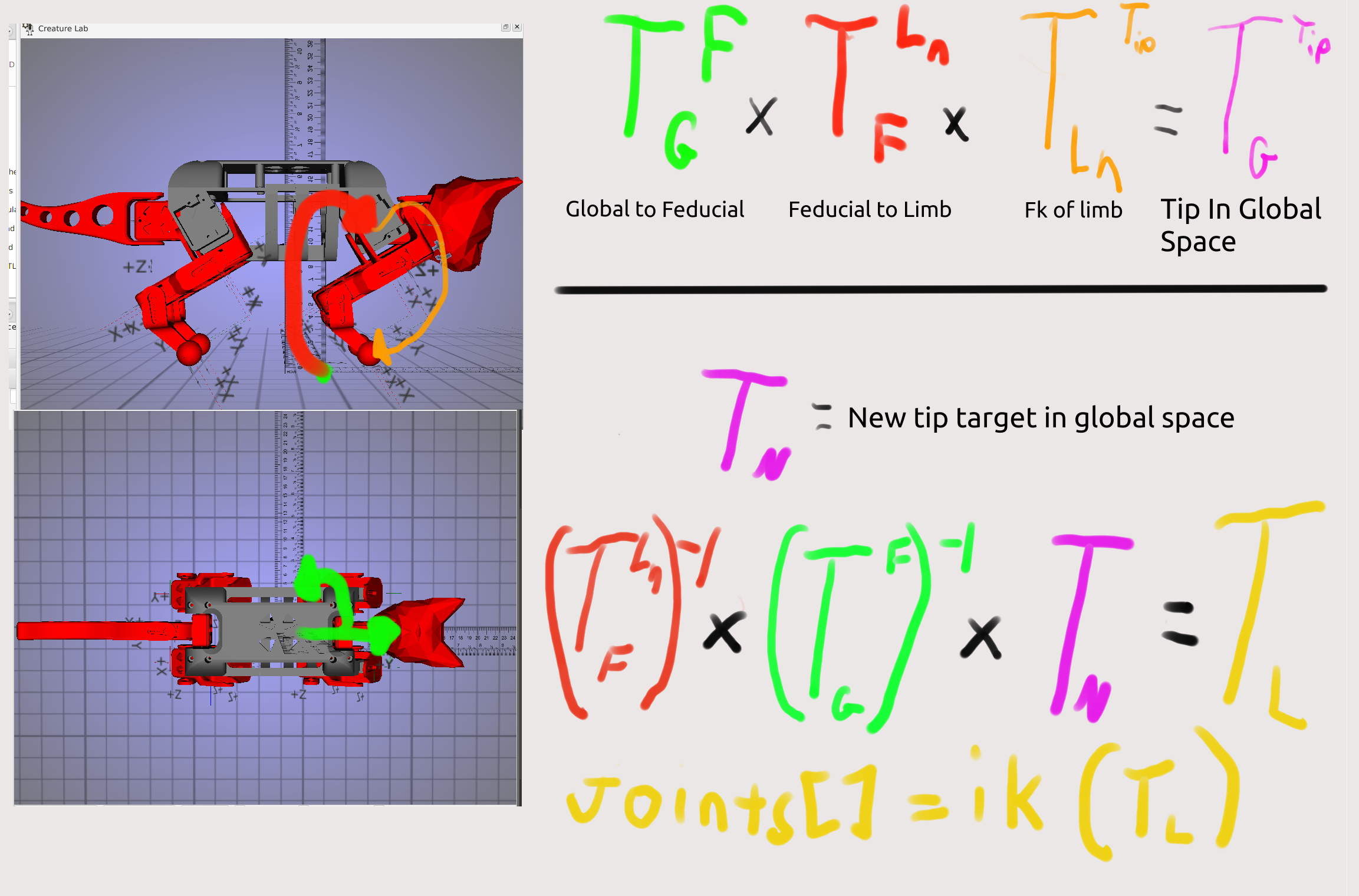
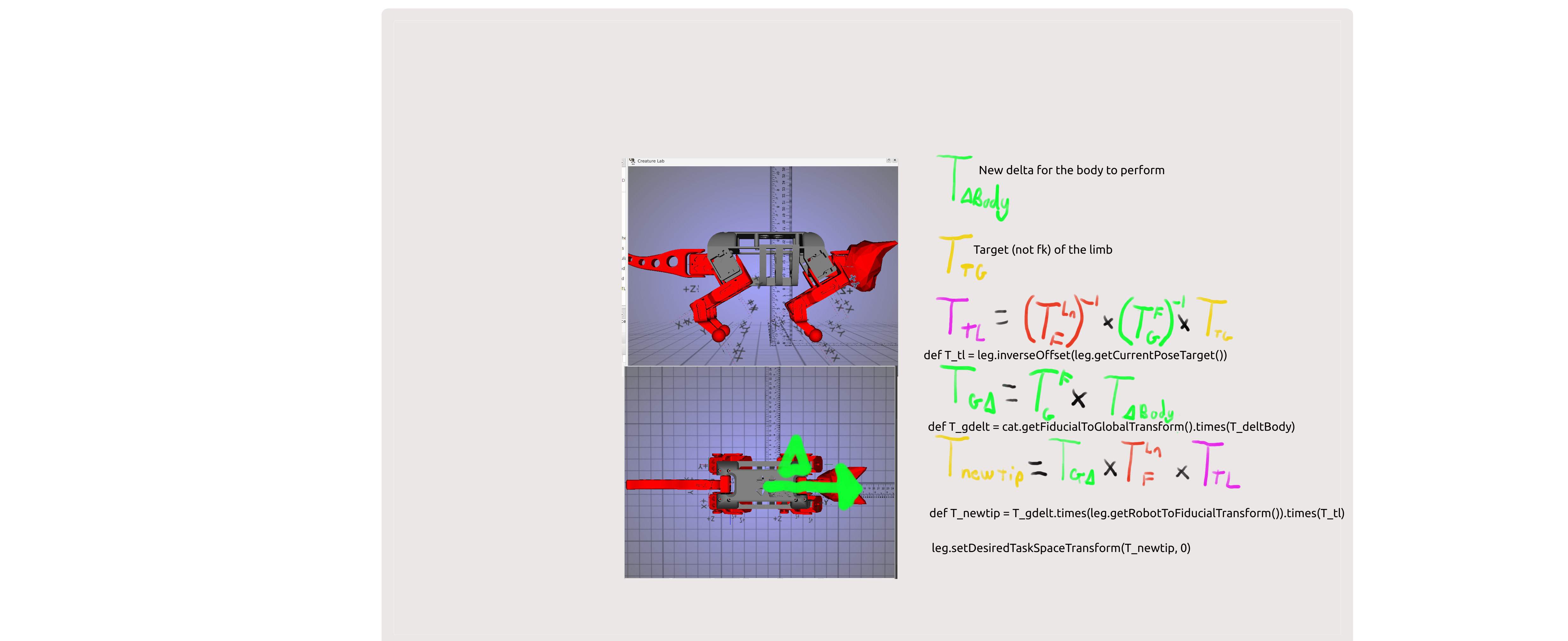
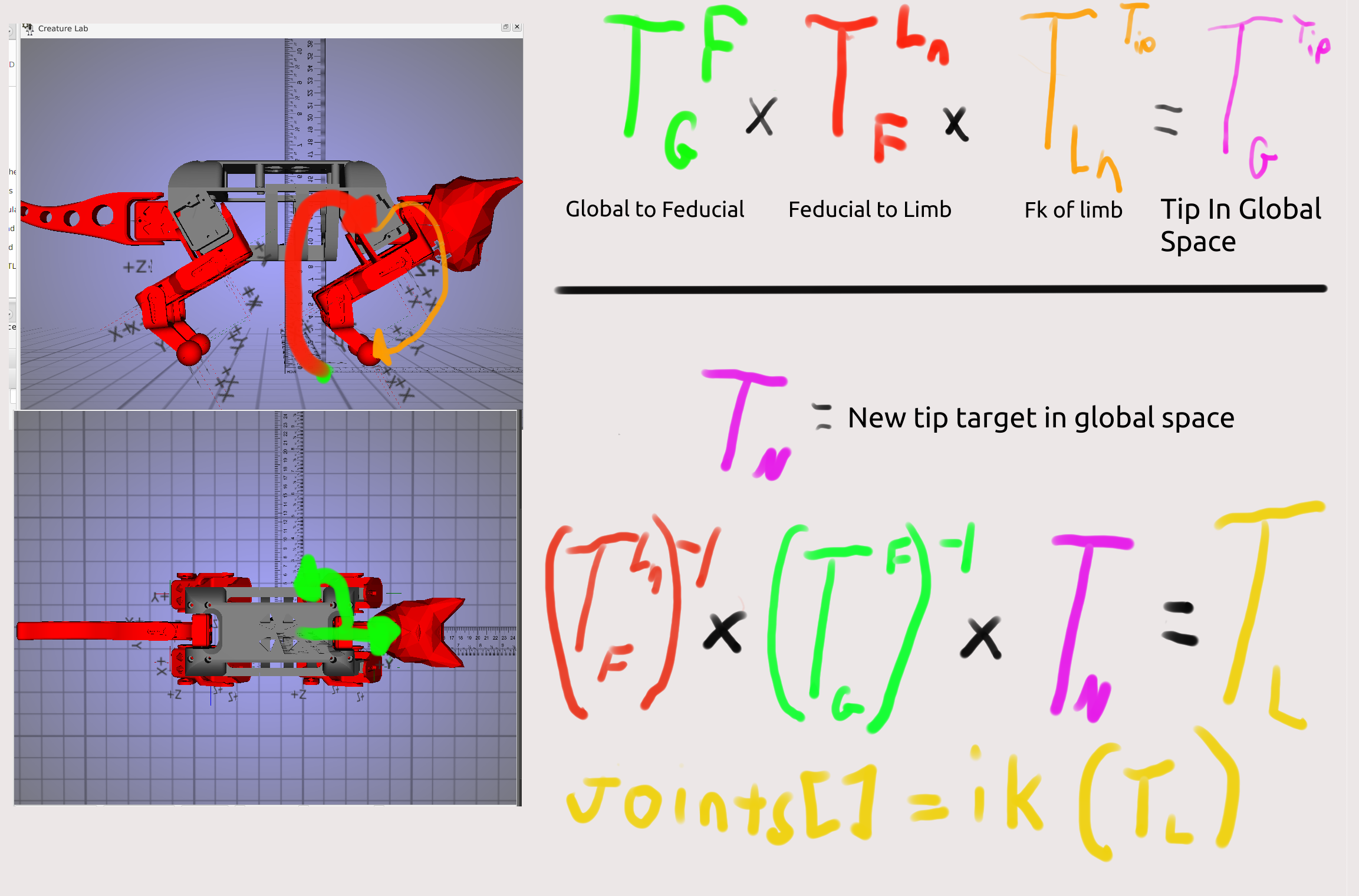
SmallKat Kinematics
11/10/2019 at 23:24 • 1 comment![]()
This weeks videos have to do with the math the controls SmallKat. Tune in if you are a math nerd looking to understand robot kinematics!
-
SmallKat Assembly and Calibration Videos!
10/24/2019 at 15:31 • 0 commentsI have filmed a set of videos that take you through assembly and calibration of SmallKat Grace.
-
Thank you!
10/01/2019 at 04:23 • 0 commentsAs this competition nears its end, we just wanted to take a quick second to thank everyone who has supported this project. When we first started Smallkat it was really just a challenge to see if it was possible to make a super small and adorable quadruped. We really did not expect it to become as big as it has. Smallkat has been a staple for robotics demonstrations at WPI for over a year now bringing smiles and wonderment to both kids and adults. We have encouraged and inspired students to learn more about quadrupeds and robotics in general and take on challenges they might not have thought possible. Smallkat has been a past time, a senior project and a passion of ours for the last two years and we are excited to share this adorable robot with the world and hopefully inspire more people to build, create and get excited about engineering. Thank you to everyone who has shown interest and support, built their own Smalkat, asked questions and most of all, for letting us share our project with you.
![]()
-
SmallKat Curriculum!
09/23/2019 at 19:40 • 0 commentsHere is a link to the SmallKat teaching curriculum:
https://docs.google.com/document/d/16jmpZ8z6Lw8g2hYu_gwpO5CaW7e0nuaeb-JE35jBCps/edit?usp=sharing
Here are the lab procedures:
http://commonwealthrobotics.com/Mobile-Base-Control/BasicWalking/
The lectures are being recorded one by one as the class is taught in B term (Mid October through End of December). They will be recorded and posted on youtube.
-
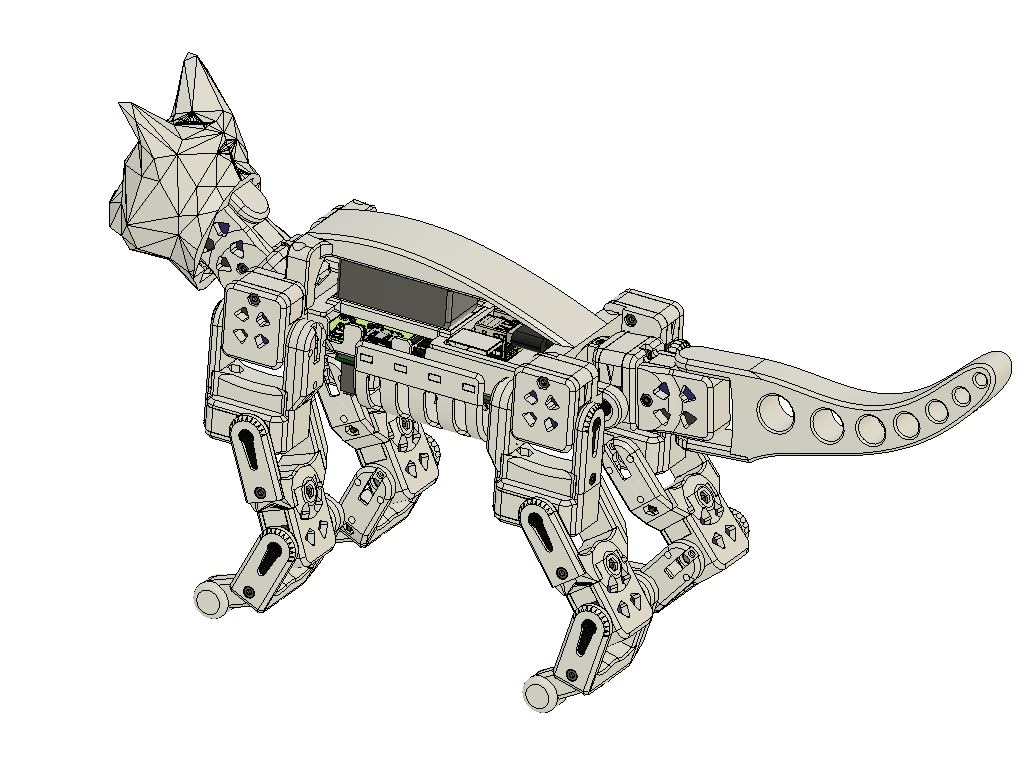
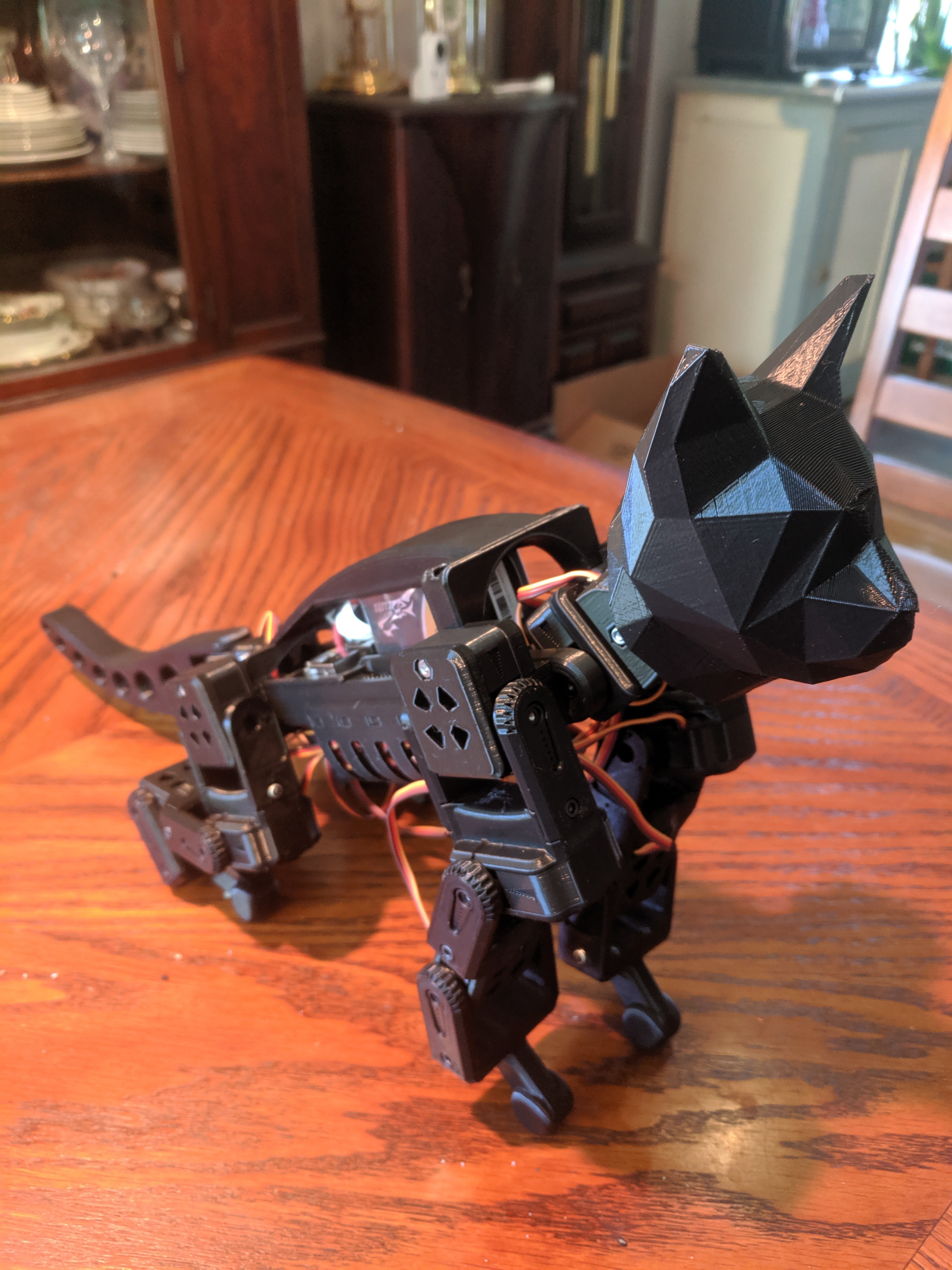
Design Revision: Update 2
09/20/2019 at 16:51 • 0 commentsIts been some time since the latest revision of the cat but we have been busy. We tested the last version from our previous design update and found it to be a little too big and heavy for what we wanted. For this version we essentially combined the original version and last version together. The features of this version include the following updates:
- Longer legs and a slightly larger body with same setup as orginal
- Uses M3 hardware for easier procurement and assembly. M2 nuts constantly stripped out of plastic.
- Optional encoders for additional feedback
- Improved calibration
- Better aesthetics
This version of the cat has more parts than the original however the assembly process is significantly easier and it is more robust. Additionally replacing servos and other parts takes much less time.
The next step will be wiring and running this version through some tests with walking and fixing a few small design errors with tolerances. This version is getting closer to what we hope a final and commercial product would like. Still a lot of work and testing to go before we get to that point. For now enjoy the working prototype featured on our page!
![]()
![]()
![]()
![]()
![]()
-
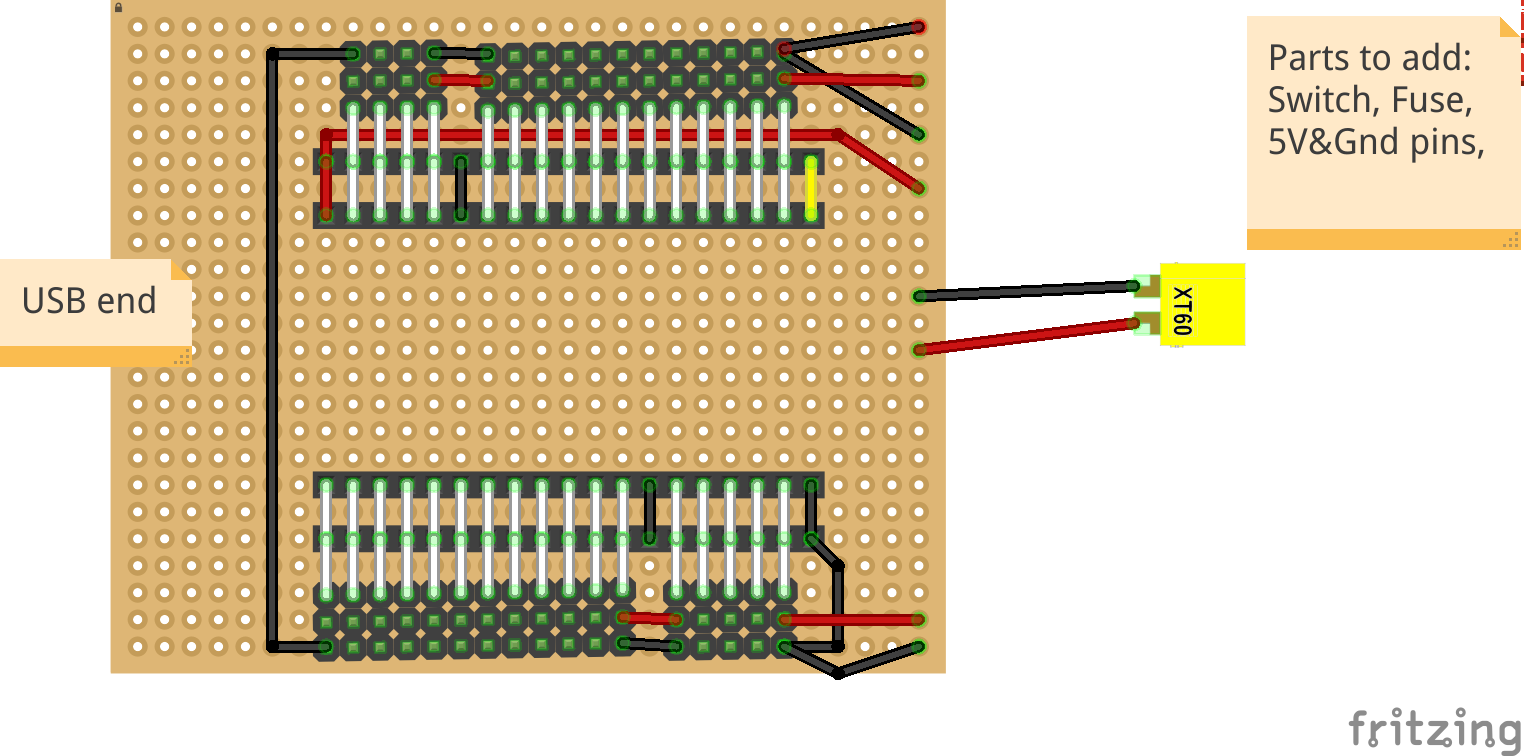
A friendly user helped out with a wiring diagram!
08/16/2019 at 20:33 • 0 commentsShout out to @jtechs who made a lovely wiring diagram as he builds the FIRST build of SmallKat made by another person!
![]()
-
New Assembly instructions and BOM purchasing info!
07/16/2019 at 20:36 • 0 commentsToday was busy and productive! I printed out a new Grace model SmallKat and made an assembly instructions document. Check it out here:
In it you will learn how to assemble a smallkat robot, as well as calibrate all its links.
I also added the purchasing direct links on all of out BOM:
https://hackaday.io/project/164727/components
This should fill in the mystery steps in our previous documentation.
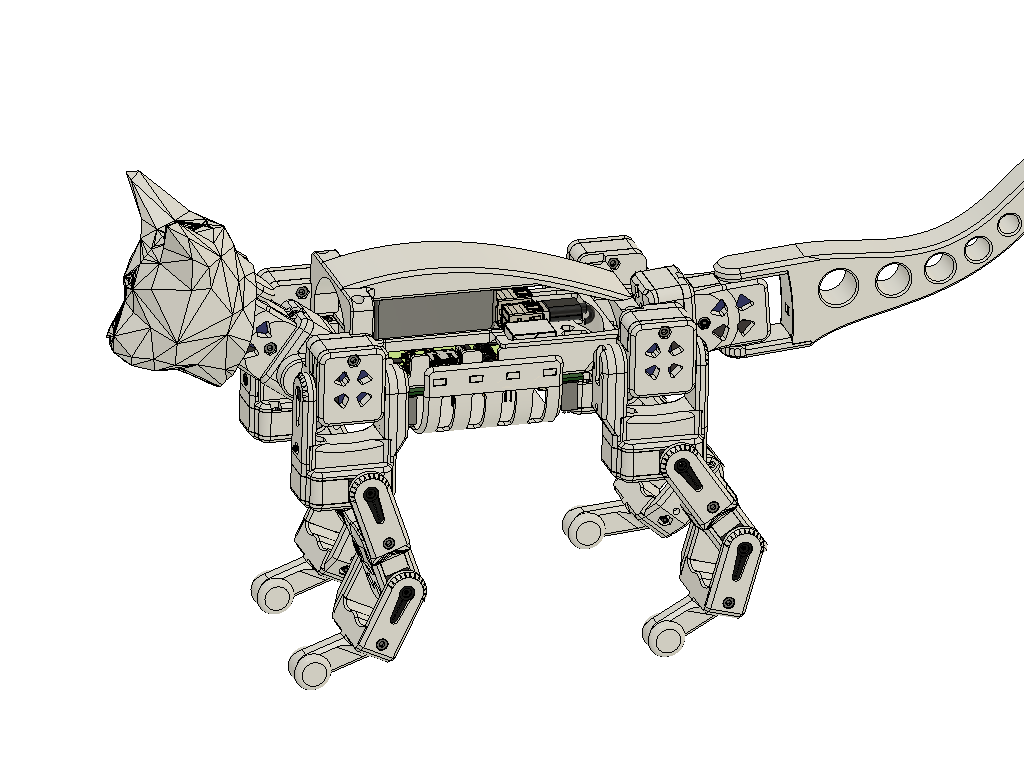
SmallKat: An adorable dynamics oriented robot cat
A dynamics oriented quadruped for research and education.