 agp.cooper
agp.cooperOriginal MPRT Laser Cut Design
It is the original design concept (including gear ratios) but with the optimised output ring.
The optimised output ring has been trimmed to meshes properly. It should have less backlash and gear "movement".
It has taken a while to work out how to design a layered build up suitable for a laser cutter.
The main problem was that the stepper motor shaft was too short (only 14mm) and cannot be used (without some sort of extension) to retain the gears. The solution was to extent the height of the sun gear.
Two designs versions will be presented:
- a 360 plus rotation version, and
- an elbow version.
Here is a top view of the stacked gears:
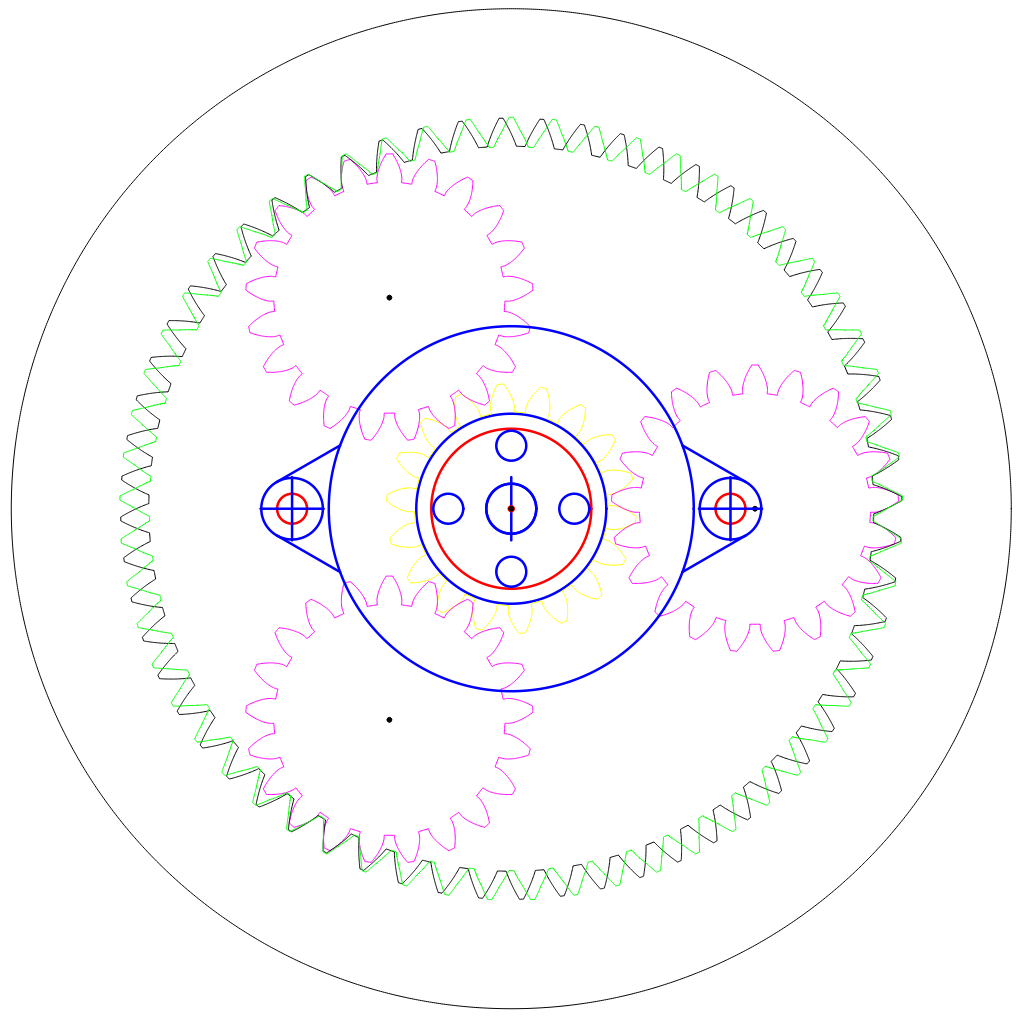
Notes:
- The stepper motor (blue) is mounted to the bottom or first layer.
- The sun mounting hub and stepper motor mounting bolt heads are on the second layer.
- The second layer also has to make access provision for setting the hub grub screw.
- The next layer will have the sun, planets and fixed ring.
- The next layer will have an extension of the sun and planets, and the output ring.
- The top layer will have a retaining disk either attached to the sun gears for the 360 plus version, or attached to the fixed ring for the elbow version.
Really what you should look at here is how well the gears mesh!
The 360 Plus Version
The main thing not to like is that the end cap rotates at the same speed as the stepper motor and the hub holds it in place.
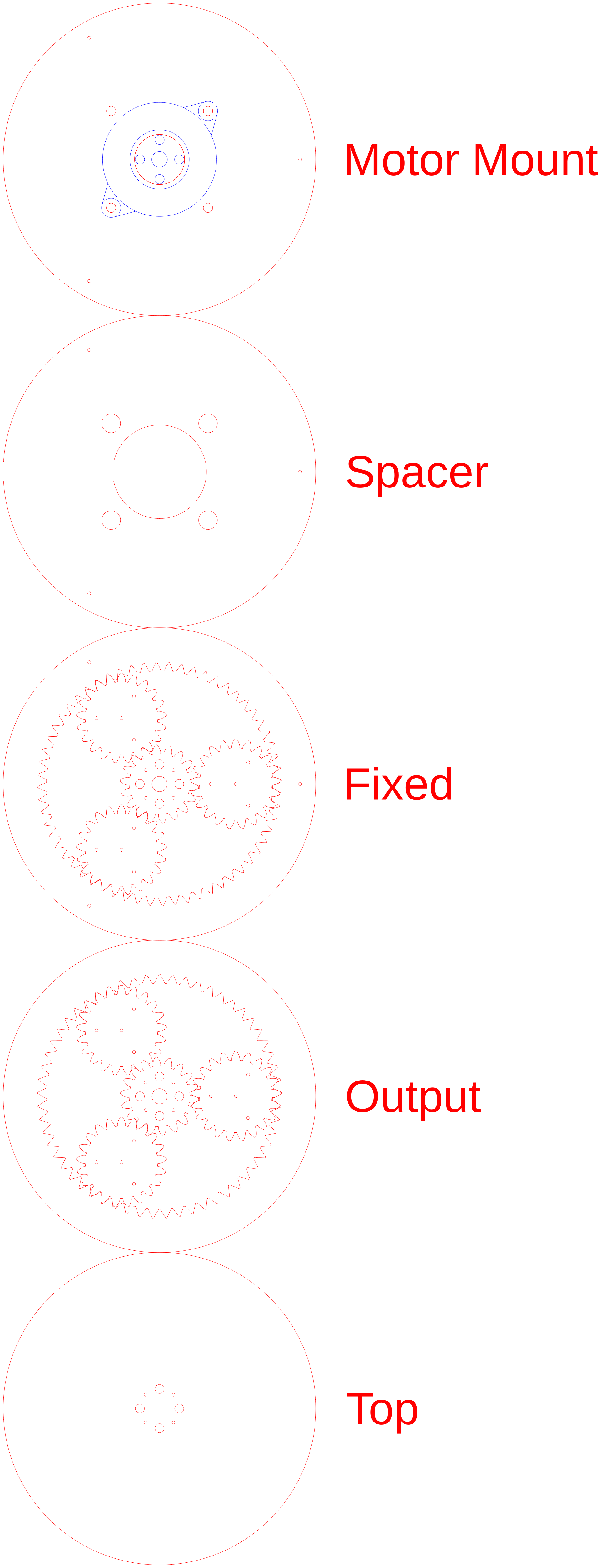
Notes:
- The slot in the spacer disk is to access the hub grub screw.
- The really small holes are for alignment.
- Where necessary, the cutout has been adjusted fro a 0.1 mm laser cut width.
The Elbow
The elbow is similar except the top is fixed (similar to the single stage planetary gear design). The top just holds the gears inside the housing. Here is the laser cut design:
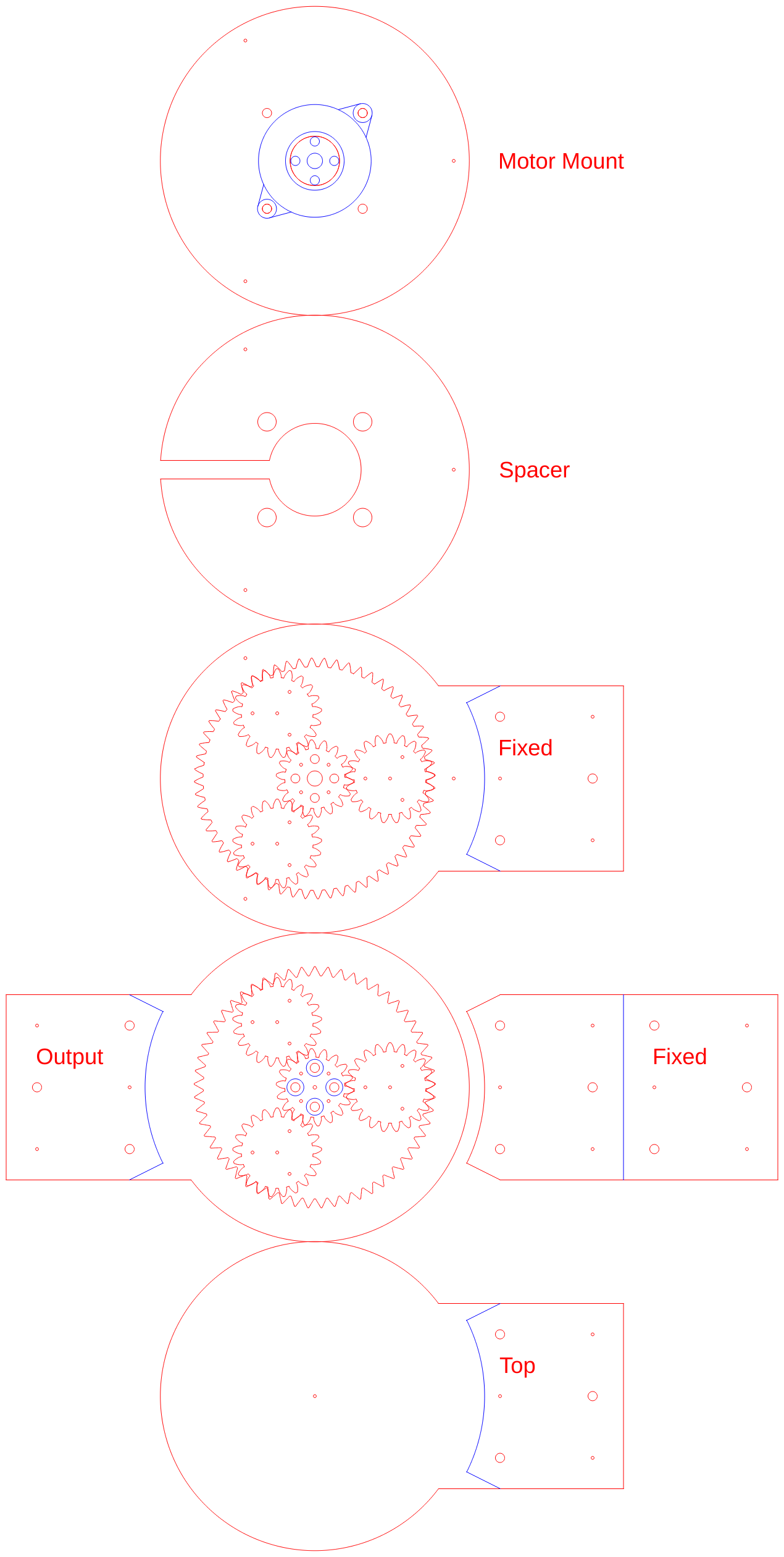
Notes:
A bit of trouble with the star gear mount bolts (to the hub). They stick up and interfere with the top. The gear is not big enough to laser cut cut holes (~6 mm diameter) for the bolt heads. I can lower the star hub about a 1 mm, more than that I have to increase the size of the motor mount locating hole (not ideal). I can (post laser cutting) counter the bolt heads.
I put a small dowel in the top later that can be used to minimise movement of the star gear.
Like Daren's original design there is no carrier.
Laser Cut Layout
Hers i the laser cut layout:
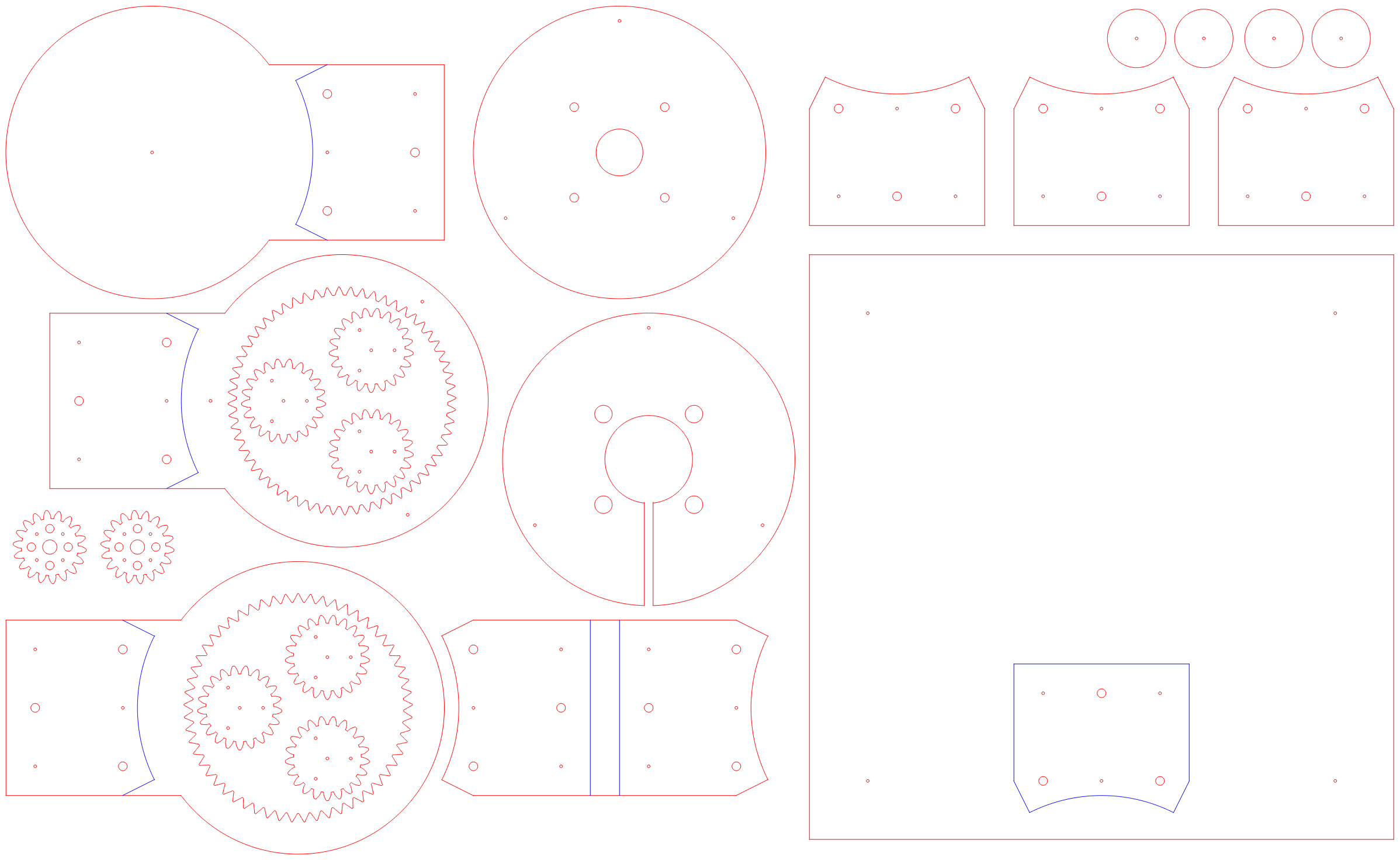
On the left is the elbow and on the right is a stand/platform.
It has been submitted for a quote (usually about A$65).
AlanX
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.
Missing steps is not a problem unless you try to go too fast from a stand still. For Nema 17 it is about 500 to 700 full steps per second. A stall at 83.33 gearing ratio will likely break something!
Where encoding is useful is for adjusting for backlash (or at least I think it could be useful).
If you look at my Prototype SCARA which is direct drive and uses micro-stepping. The torque is practically nothing (it reduces with micro-stepping). It does not require an encoder. At the beginning of a job there is a homing process to set the machine position. A geared SCARA on the other hand increases torque with gearing. A win/win. Well to a point. No point having gearing beyond the gear backlash limits, unless torque is more important than speed or accuracy.
AlanX
Are you sure? yes | no
I would think that an encoder would be useful for feedback, but I suppose you can do that with current sensing as well.
Are you sure? yes | no
I have updated the log for the elbow version. I am working with a 2D package so I don't have rendering.
Most of the work has been to minimise backlash. So I am hoping it is minimal.
If I get 1/10 of a degree backlash I will be very happy. In this case no need for an encoder.
This is why, Daren's 83.333 to 1 is overkill. A good 18 or 36 to 1 is realistically the best I can hope for. I am in two minds whether to make Daren's gearing ratio or go for a lower gear ratio. As it is Daren's project, I think his gearing ratio should be given priority.
There are magnet encoders that could be added to the top layer easy enough.
AlanX
Are you sure? yes | no
Ah, I see, it's not so different after all.
What do you mean you won't need an encoder? Are you going to rely on the motor not skipping steps?
Are you sure? yes | no
I can't quite imagine the elbow version from this description, looking forward to the designs. Have you also thought about where to install the encoder on this?
Are you sure? yes | no