Ilyas Akhmetzyanov
Ilyas Akhmetzyanov-
ESP32 PCB beta is here
06/30/2019 at 14:32 • 0 commentsHello!
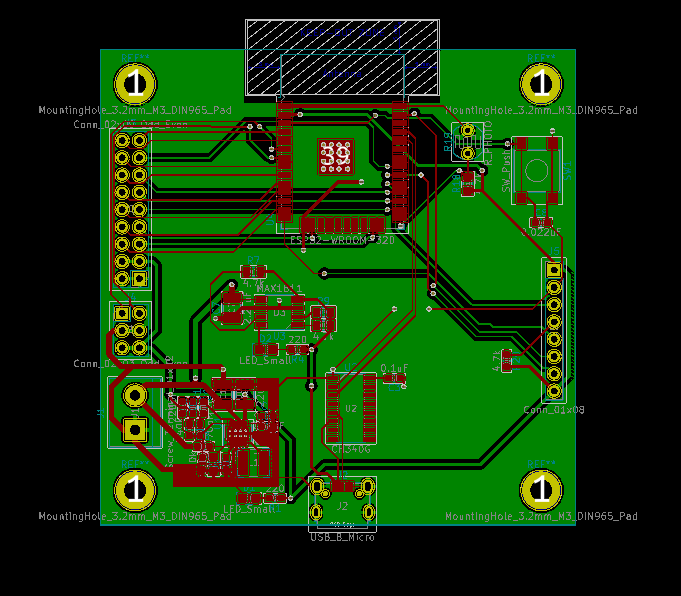
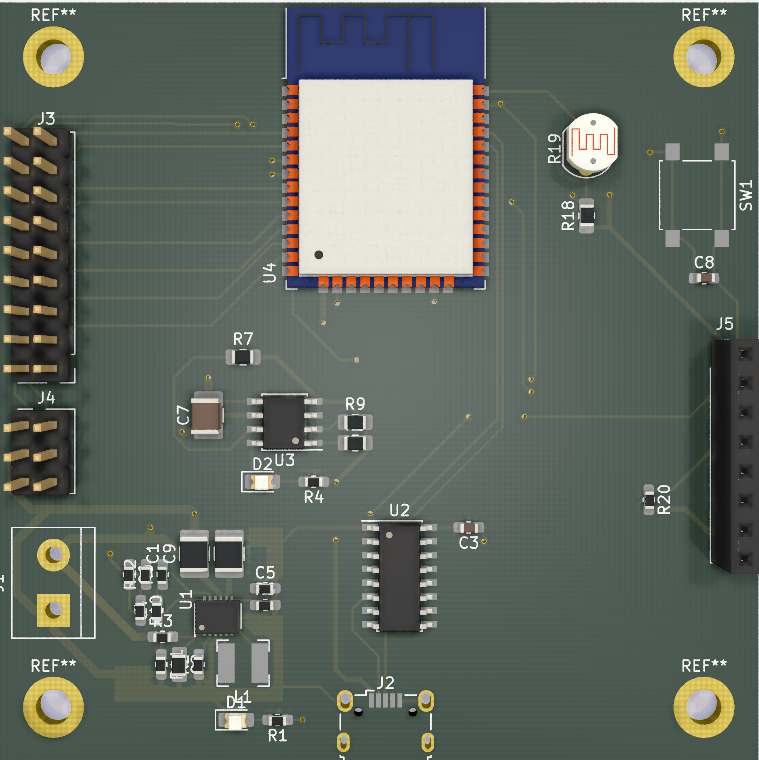
Today is a day when I completed beta version of the PCB design for ESP32 edition of the Micropython Robot Kit.
Why "ESP32 edition" ? Because I want to made two versions of my robot kit.
First one - based on ESP32 wireless module which can be used with Micropython or FreeRTOS. And I will call it like a "Starter".
Second one - based on STM32F4 microcontroller with additional wireless module which can be programmed with Micropython, FreeRTOS or "Baremetal" by C or Assembler and I will call it like a "Pro".
Anyway, part of work is done, and let me show you a result.
![]() ---------- more ----------
---------- more ----------![]()
Later I will uploaded Kicad project on Github.
PCB still need a lot of work, for example, now I thinking about made it smaller, and adding motor driver IC like MX1508, etc.
Stay tuned!
-
Explanation
04/09/2019 at 18:53 • 0 commentsHello for everyone!
Another year - another HackadayPrize. And we love it! And of course, for participate in the contest, you need to create new project page. In this year I enter to the contest with side project from my main big work - #Rhoby.The Social Robot.
My new project is about creating flexible, versatile kit for rapid prototyping robots for numerous purpose. I planning use for this - ESP32-WROVER module which have a powerful microcontroller onboard and equipped with BLE+WiFi transmitters. ESP32 microcontroller is supported by Arduino IDE, have a MicroPython port, and, of course, you can use FreeRTOS for programming this chip on C/C++ language.
In opposite side, I have idea - using STM32F407VGT6 + HM-11 module, because this architecture is supported by similar set of the IDEs and programming languages, but it use pair of controllers versus one module with SoC like ESP32.
Next few weeks I will spent for testing both of this architecture, after that I will publicate my conclusion with all Pros and Cons, which will contain different aspects include economic of the both.
Stay tuned!