 François Ubald Brien
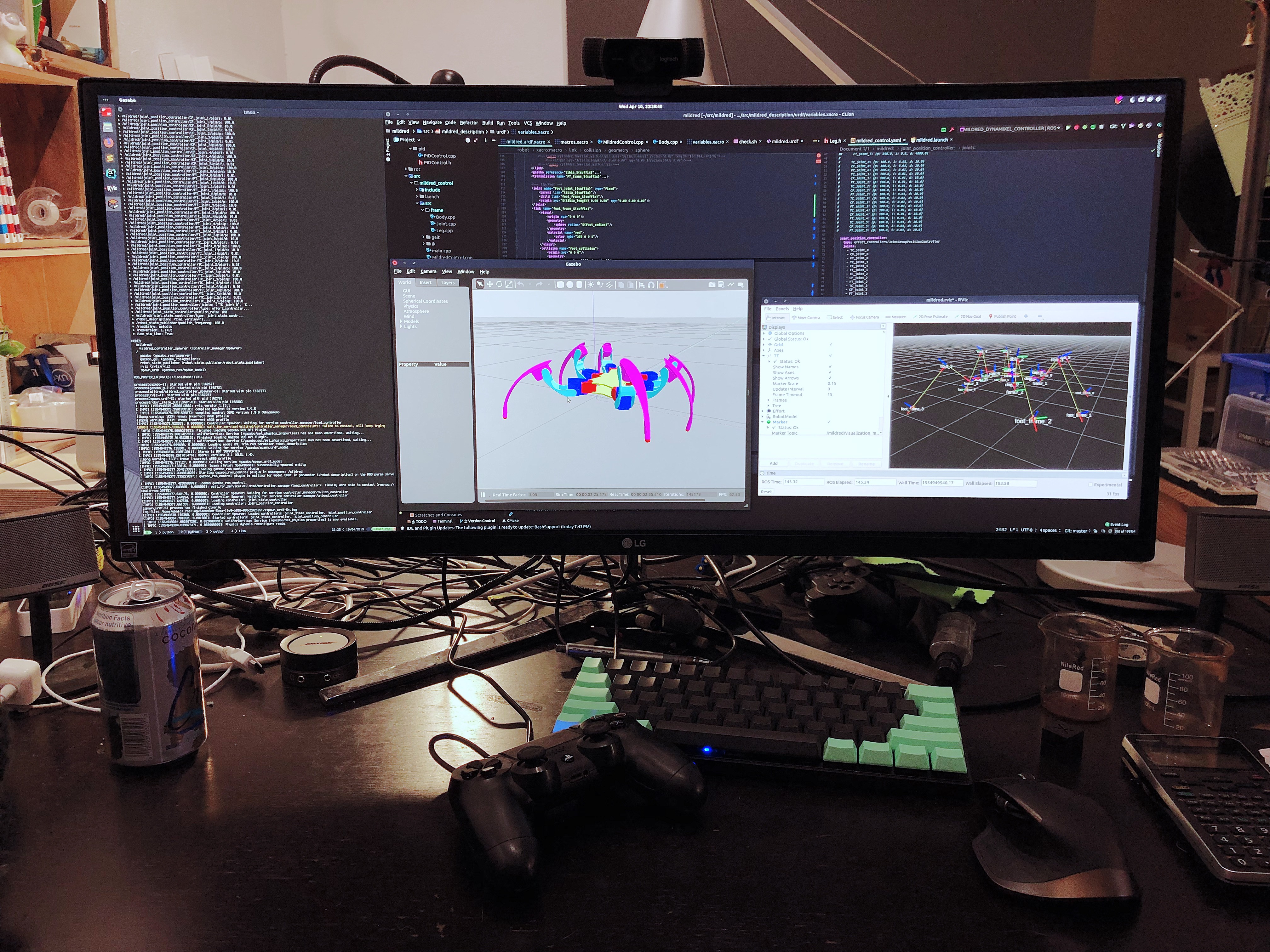
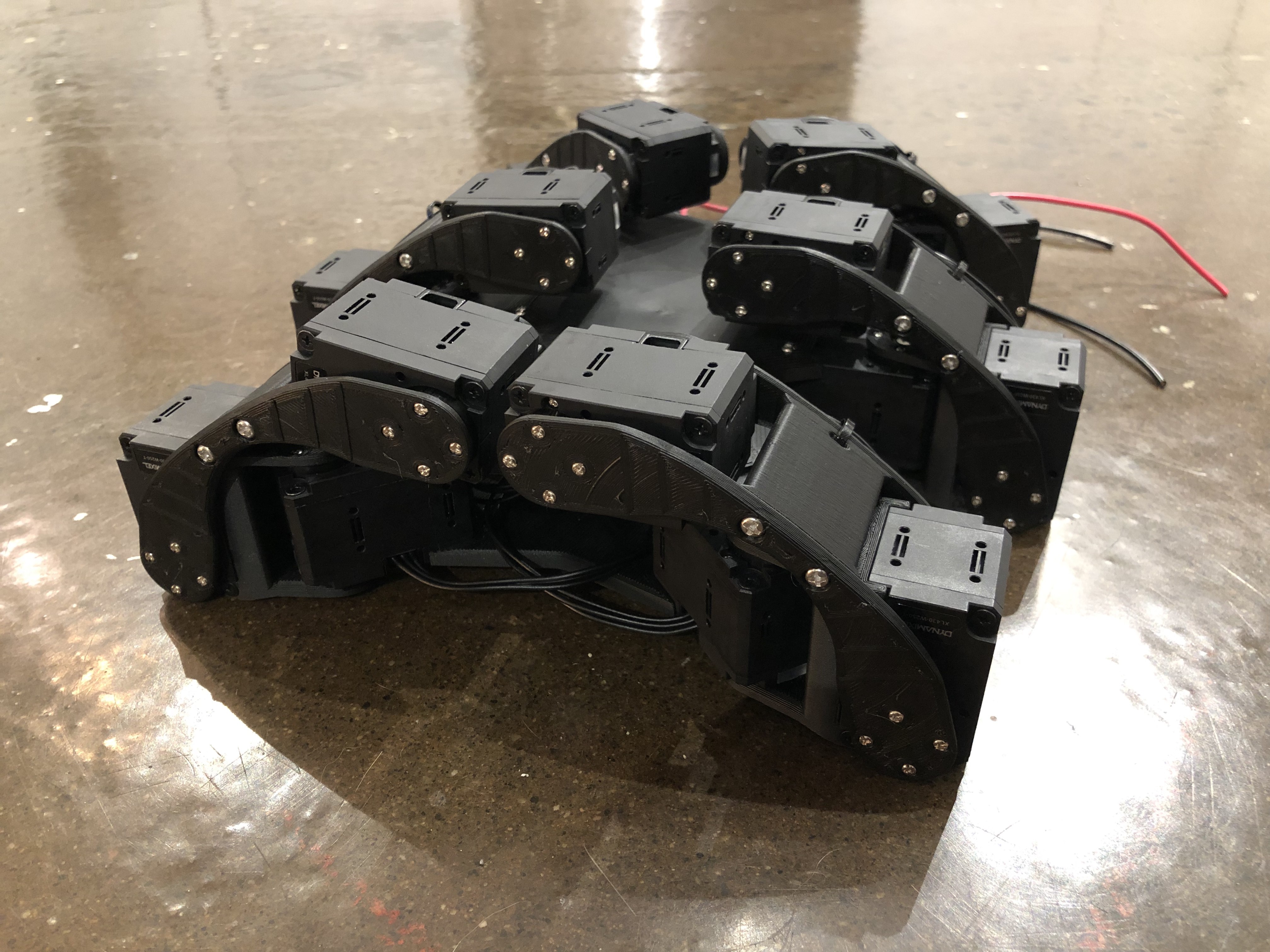
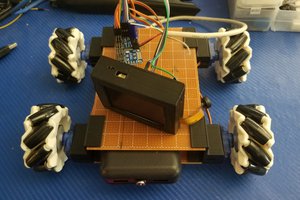
François Ubald BrienThe robot will first run tethered to a computer and PSU while I develop the software for it. It runs on ROS Melody using Ubuntu 18.04.
I will eventually upgrade it to have a LattePanda Alpha on it's back so that I can run ROS on board and experiment with vision/SLAM and an IMU.
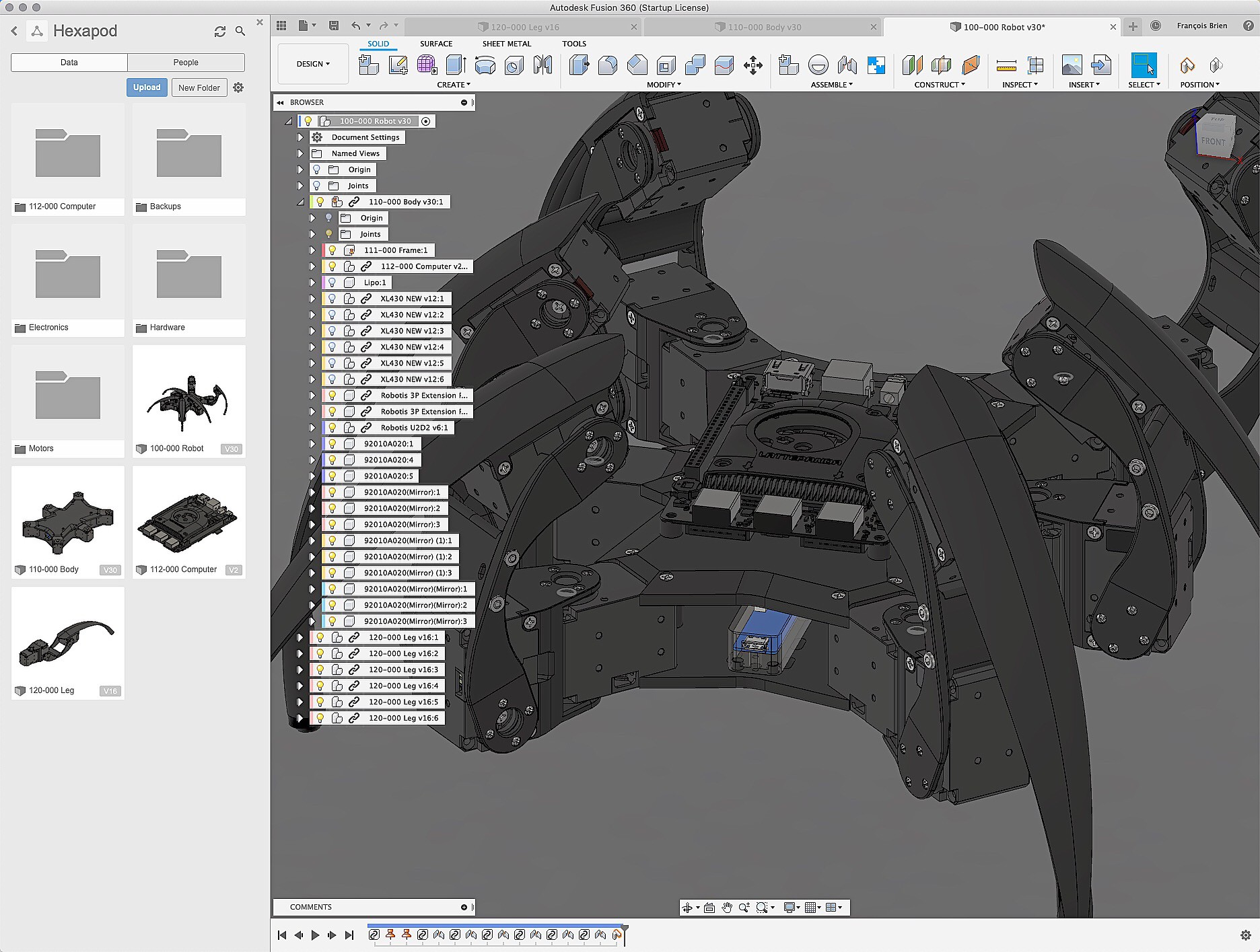
I plan on making the CAD files available once all the issues are fixed.






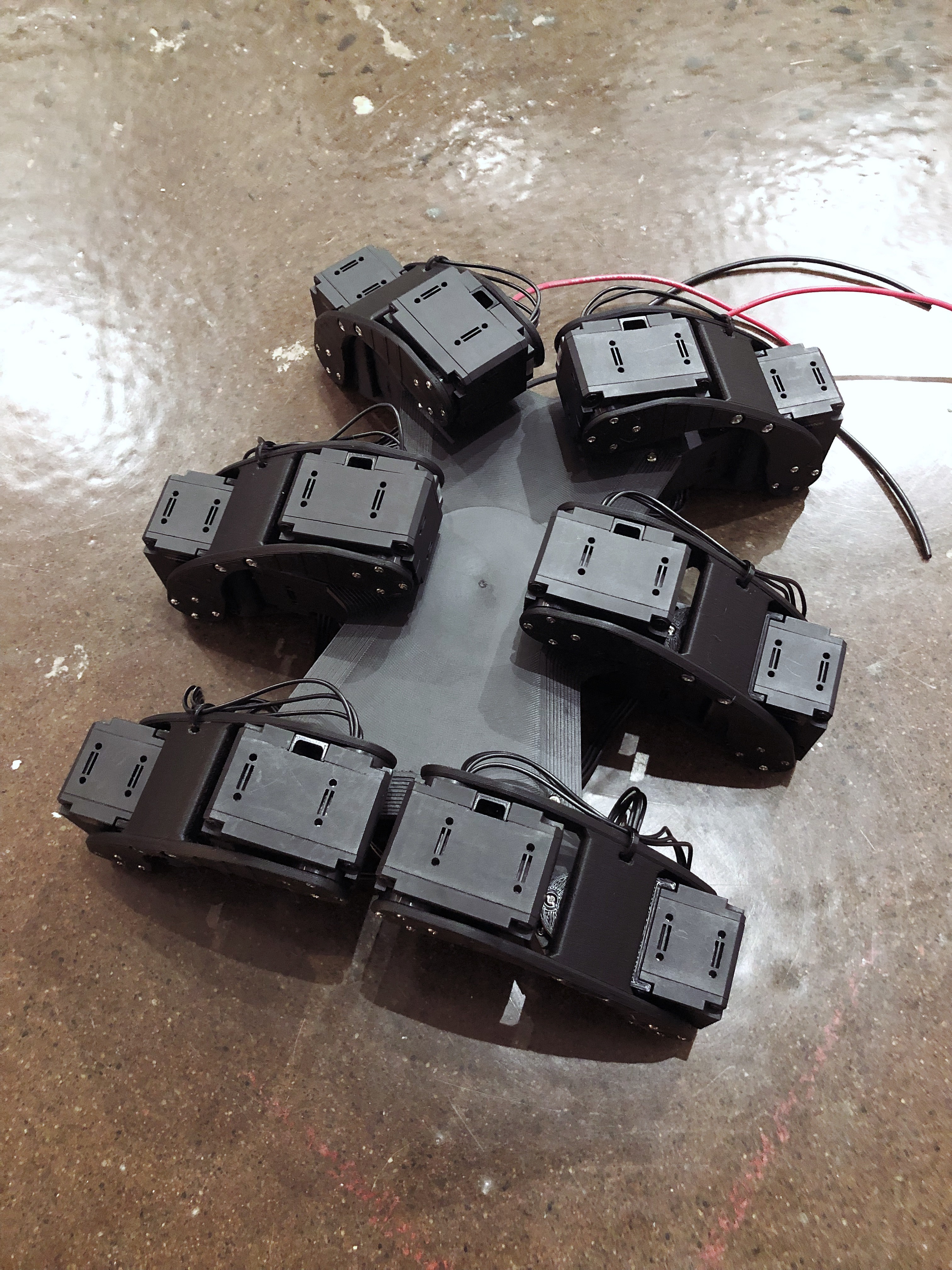










 I don't know why, I always enjoy having a bunch of similar objects that pack nicely together.
I don't know why, I always enjoy having a bunch of similar objects that pack nicely together.






 pRoFiT
pRoFiT
 Sarah Petkus
Sarah Petkus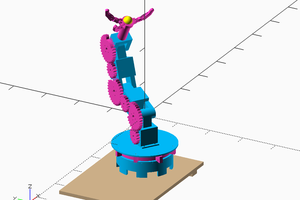
 Les Hall
Les Hall
 Joseph Marlin
Joseph Marlin
Looks awesome! Do you share your 3D Model/3D parts of your hexapod. I'm planning to use dynamixel xl430s too, but cannot find 3D parts anywhere! Thx