 François Ubald Brien
François Ubald Brien2019-03-30 Printed and assembled the body during the weekend.


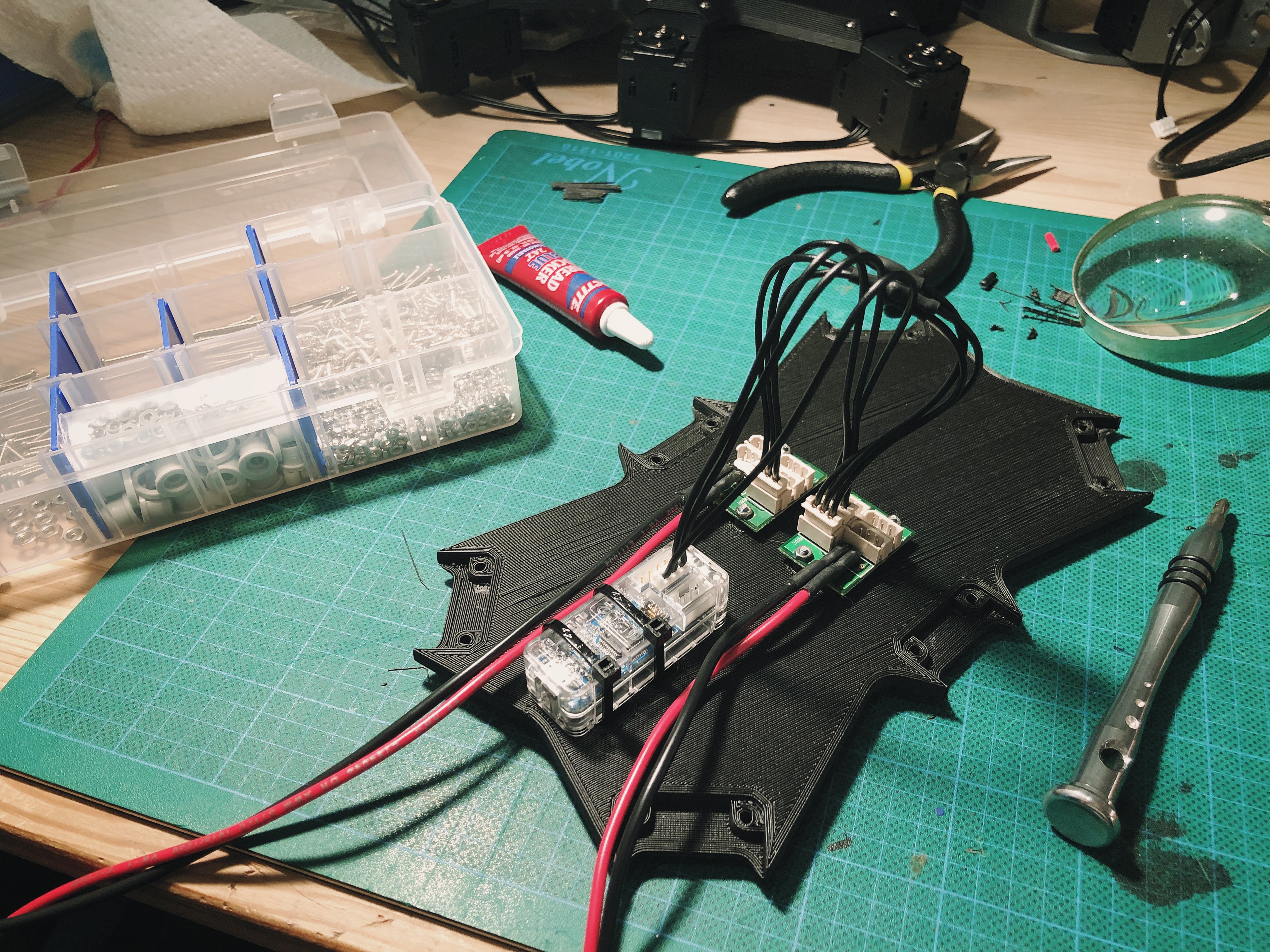
I didn't trust the original cables to be beefy enough for the power required to handler the load on 9 servos per board, so I replaces a connector with male headers onto which I soldered my power distribution. It will eventually have to change as my final goal is to have it run untethered with an on-board battery.
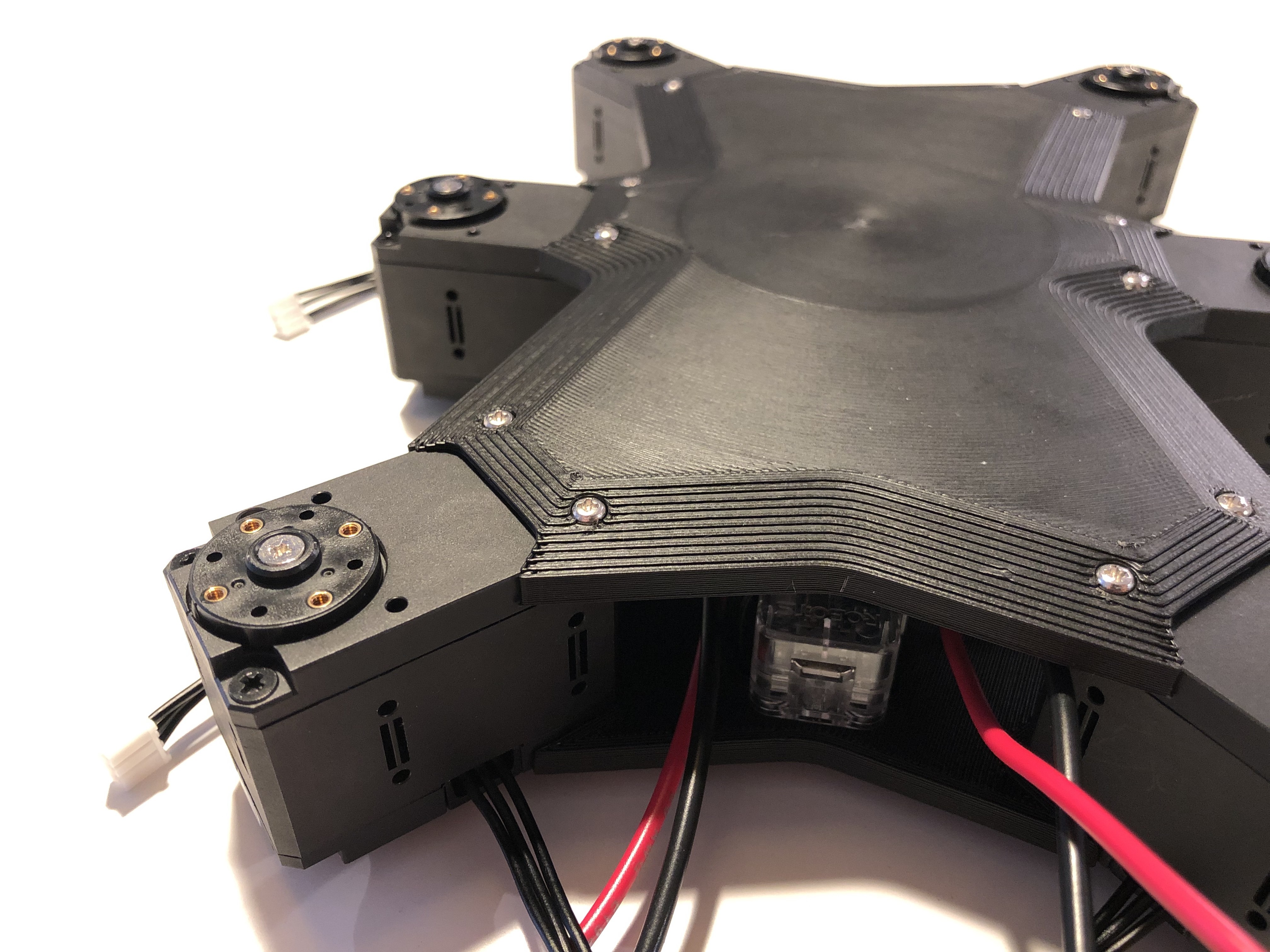
The finish on a 0.3mm print is not that great but I wanted my parts to be more solid. On a positive note, the matte black PLA from ColorFabb looks so good!
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.