 François Ubald Brien
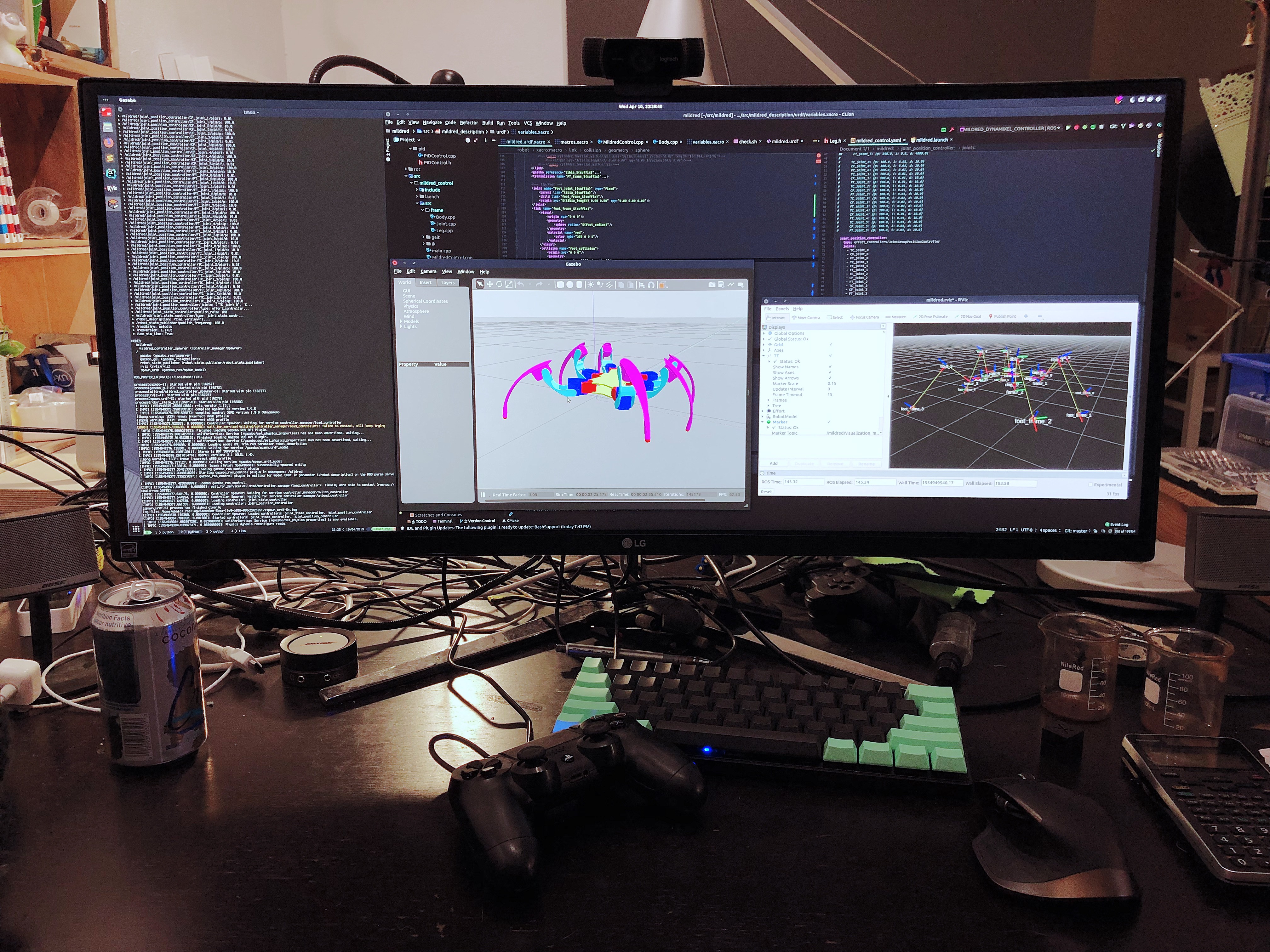
François Ubald BrienThere won't be any cool build pictures for a while. I'll be working on the software until I'm comfortable letting it run outside of the simulator. I still have a bunch of stuff to do before I can do this. After tuning the model in gazebo I have to code a startup routine where it will sense its limbs and safely bring them into a "sitting" position before standing up. Then I'll need code to manage switching leg distance from the body, so that I can reduce the large footprint that the long tibias is causing during the standup procedure before walking.
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.