I am using a Saleae logic analyzer to test the code I develop. (This can be done with the $10 Chinese clone but realize that Saleae developed the software to make this possible. )
I need a few things to know. Especially because this is 3D printed cogs and material and any accuracy has gone down the drains.
So for the Thor control I need some measurements:
- How many micro-steps does it take to have one stepper motor full revolution?
- How many steps does the 5:1 geared stepper motors take for one full revolution?
- Finally, how many steps does the stepper motors need to move a certain angle?
You go the measurement (right side) then you can define a range you want to measure on (green arrows)
You can now select if you want to count the positive pulses.
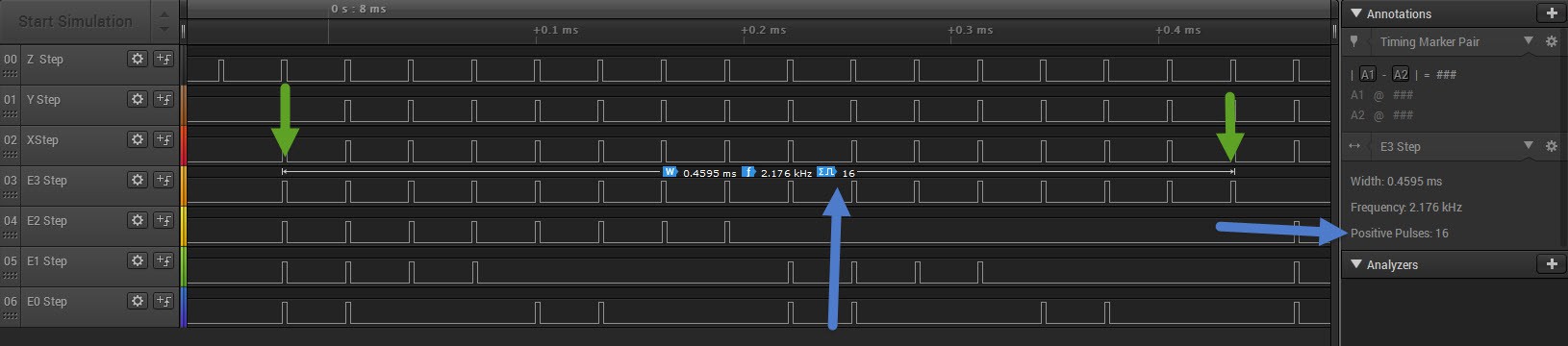
Example above shows 16 pulses.
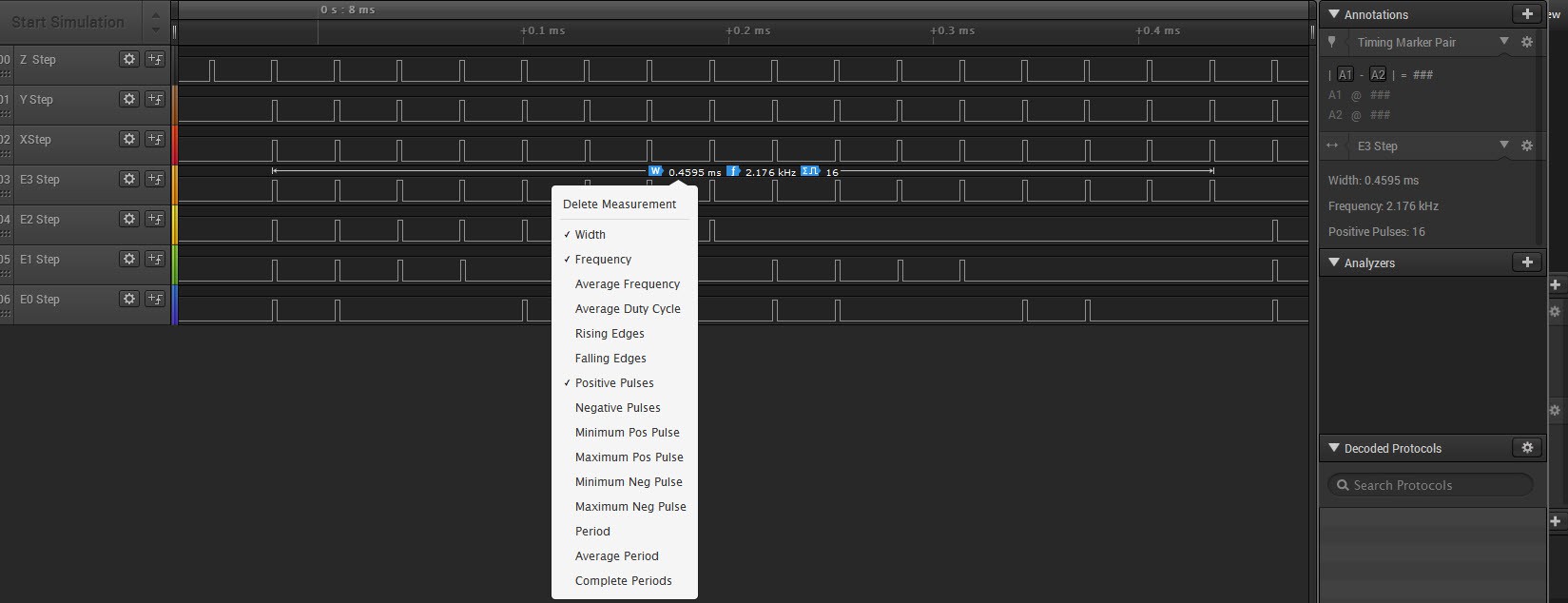
A list of possible options to choose by pressing right click on the time measurement line.
This is a very interesting feature because when I am going to steer the stepper motors, I want to be able to measure deviations. I want to know if the stepper motors behave as they should or if I have a software bug.
This counting becomes tricky when I start with acceleration and deceleration. This software will help. When you deal with robotics that deals with repetitive motion, then every step must be accounted for.
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.