Last time when I tested the stepper motors all next to each other next to each other the motors turned very hot to a point where I nearly burned my hand.
That made me realize that the current cooling inside the PLA plastic may be even worse.
Danny already gave us an adapted 3D model where a fan was added to cool down the 3 geared stepper motors.
When I look at the solution from the top view then I see that the solution does cool down the center and right motor but no air gets at the left motor. So that one may overheat.
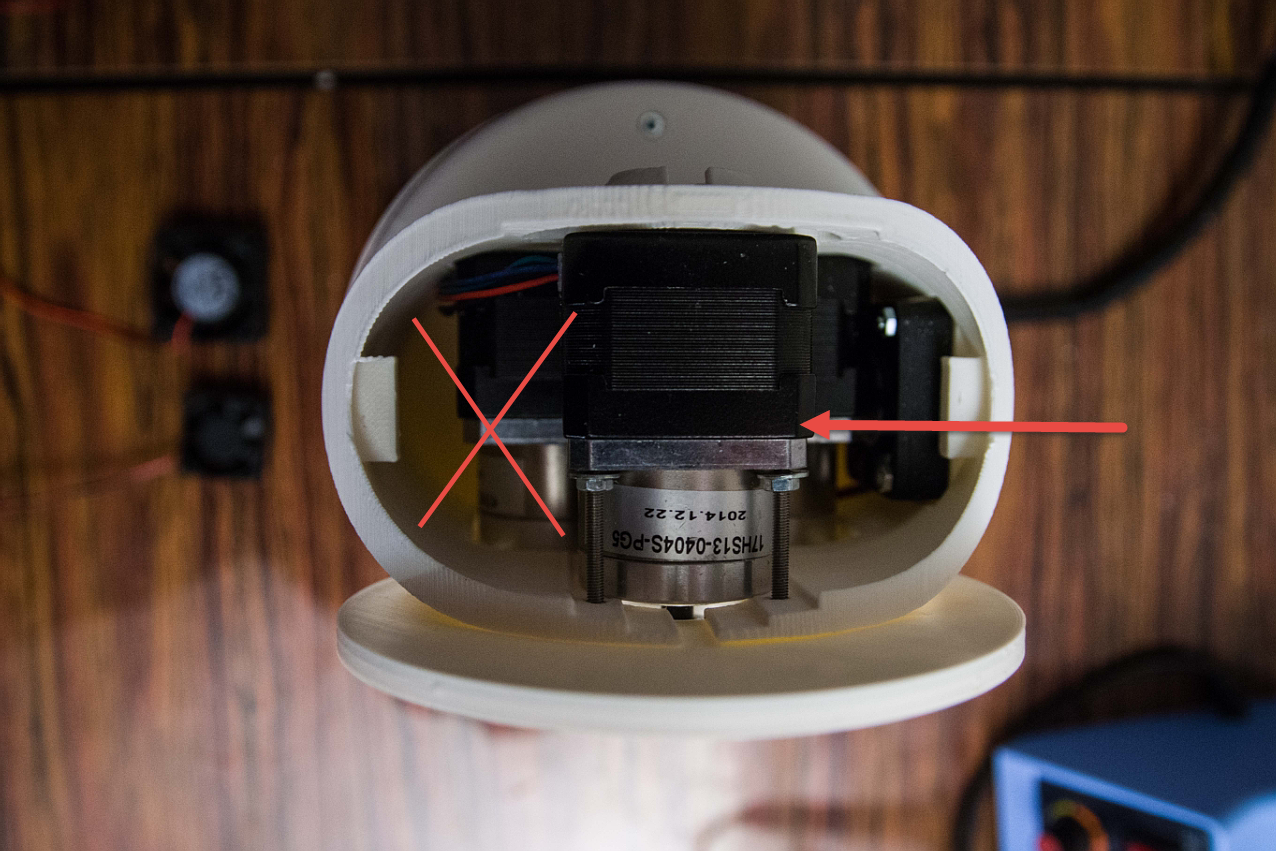
Also this ventilator it does not solve the cooling of the stepper motor below in the base. since the hot air will go up not down.
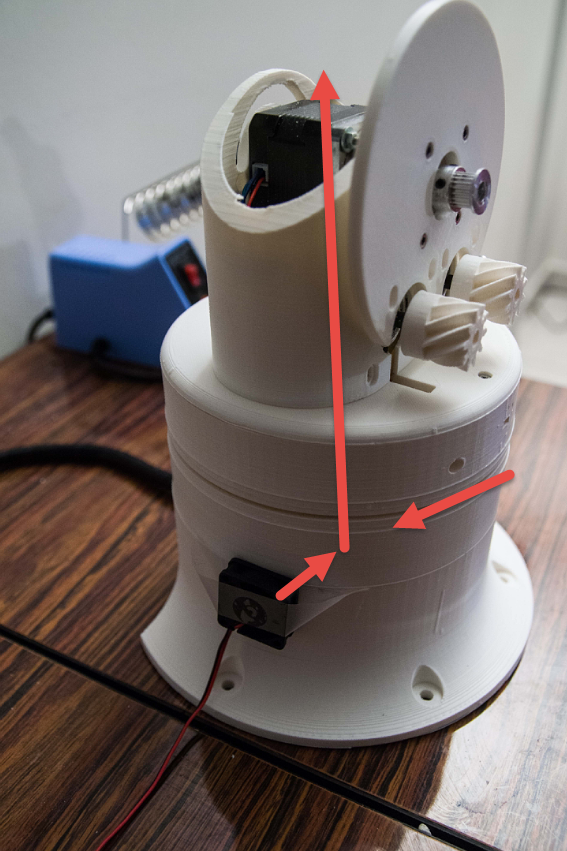
That means that I have to drill a hole in the side of the base to cool its stepper motor which is actually the most powerful one. (Seen inside the hole to the left.)
I initially thought that I would use one 40x40 mm ventilators to blow air into the base but it turns out that the base is too low to drill a hole for a 40x40 mm. So I have to resort to the 30x30 mm ones. They are more silent but also produce less air stream.
So it makes me think that I need 2 at opposing sides that drags in air and forces it upwards to the opening.
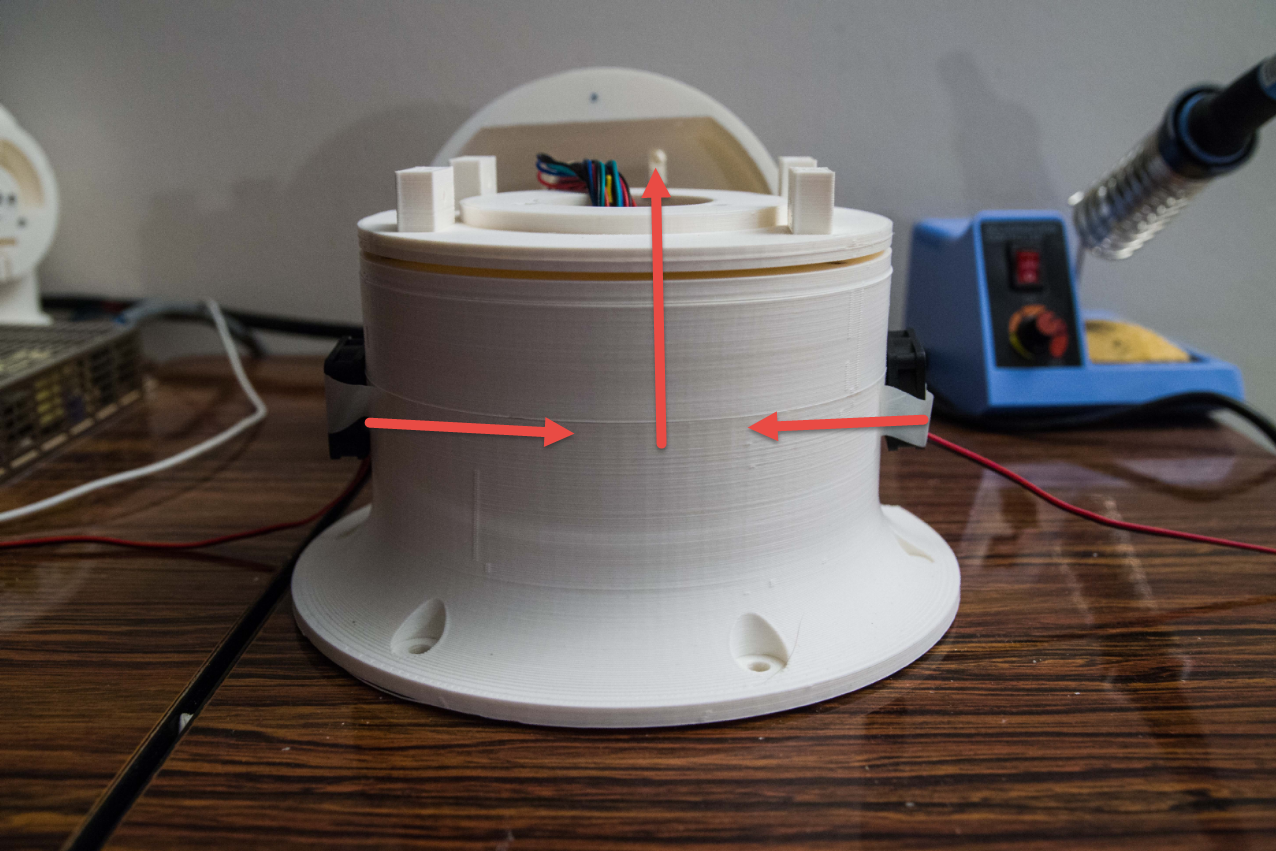
Air that is drawn in through the base and forced upwards now also will be forced in the upper stage and cool the 3 geared stepper motors on all sides so we can remove its ventilator.
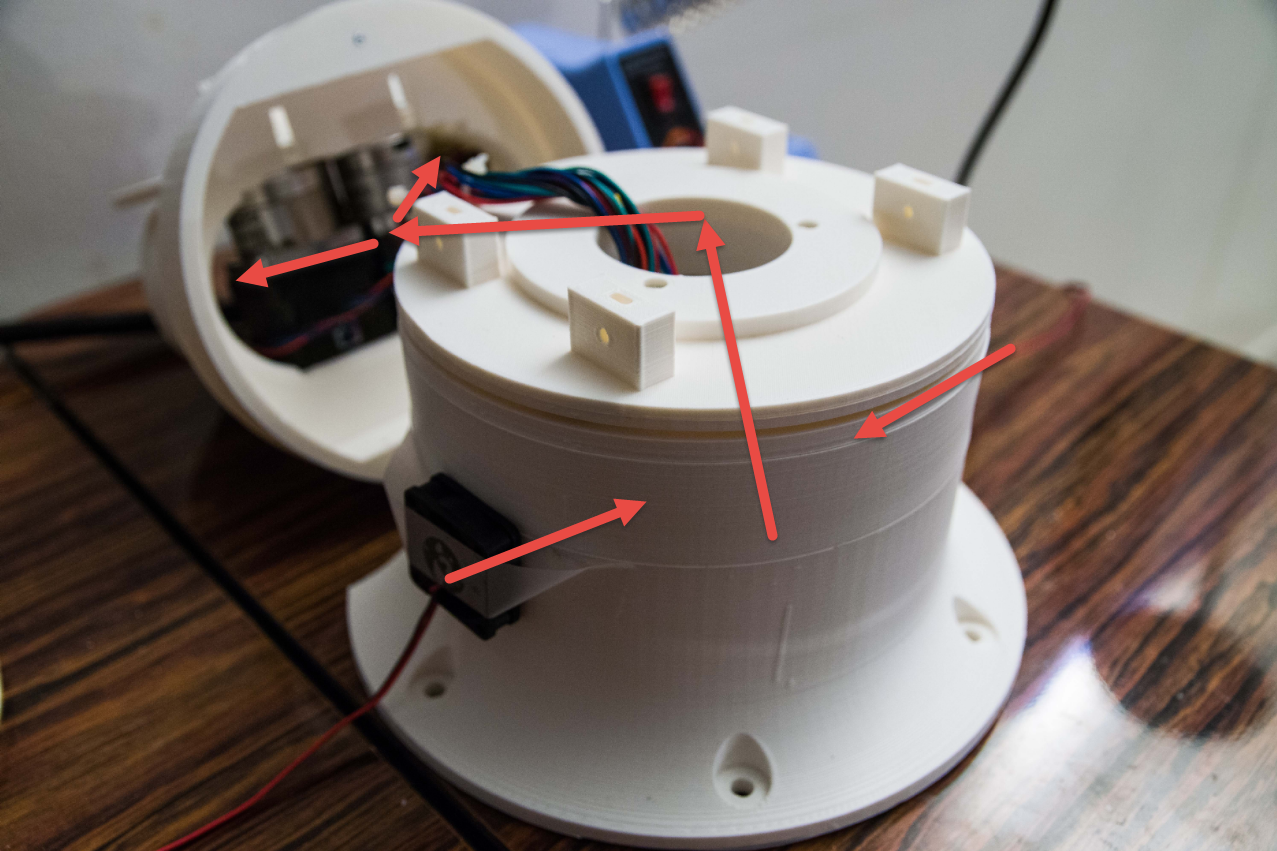
Another view how the air could be forced. Those ventilators could probably be mounted inside the base.
The only issue I have is the question if I put the ventilators in the 90 degree angle or in a tilted angle so it creates a vortex into the base. The goal is to cool the base big stepper-motor too.
If there is a cooling expert out there, then feedback would be appreciated. :-)
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.