The plan was to first analyse and retro-engineer the template for this robot, the OpenDog, in order to build an improved version, while still reusing as much as the open source assets available.
Thus the team did indeed start by watching hours of footage from OpenDog, going through the available files and brainstorming intensively on the overall design, and the components needed.
There were a few obstacles: James’ robot being a work in progress, the full part list is not yet available, and the files hosted in his GitHub repository were a start, but all the CAD files are only available in .stp format, and lack all joint constrains. Daniel started then by importing all the files into Inventor and adding back all the constrains.
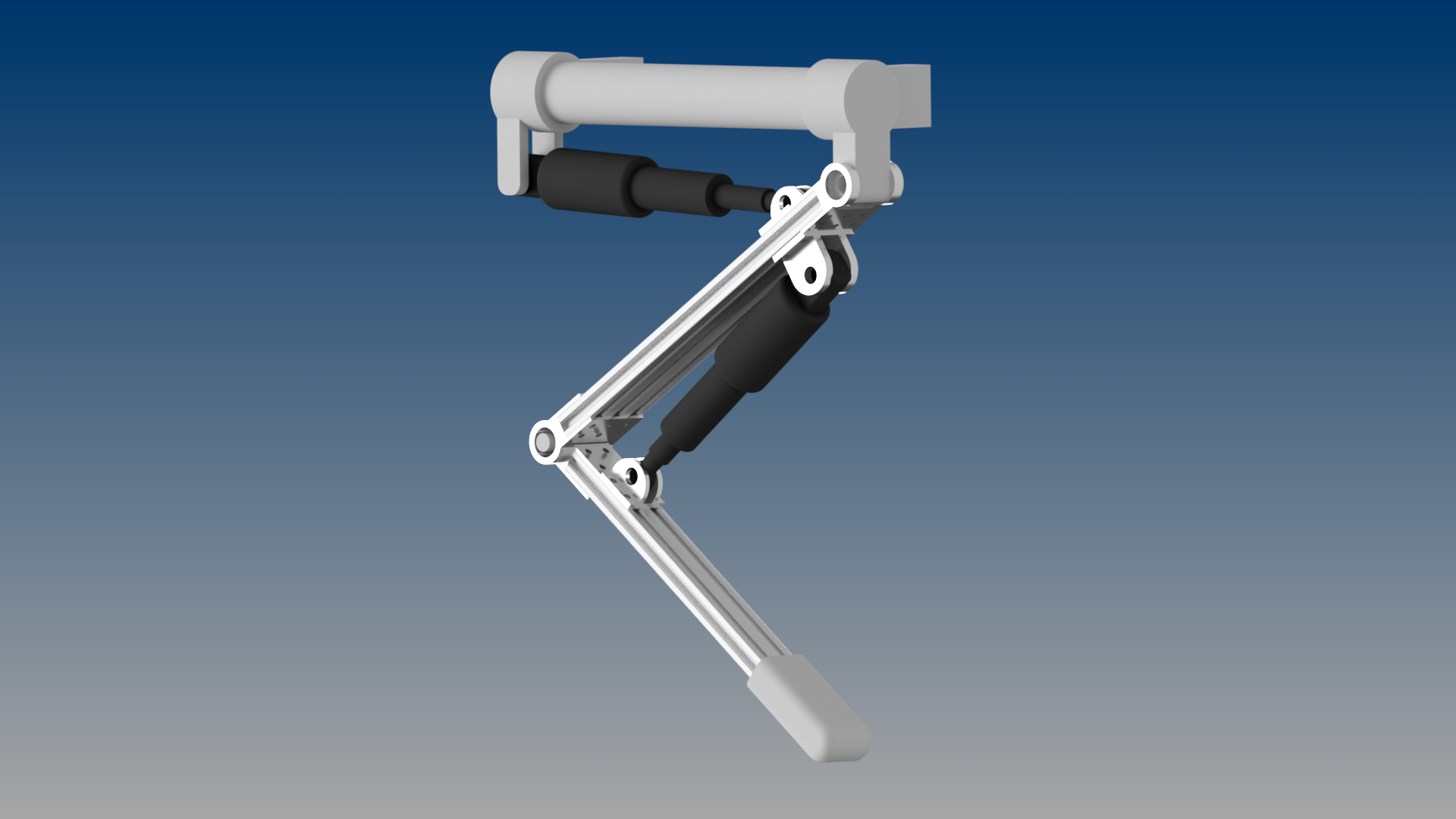
The team then looked at brushless motors, starting with James' original ones, but finally decided on using linear actuators for several reasons: it was faster than building their own home made ones with brushless motors, it would help simplify the design and finally it is a challenge they liked, as there aren't many quadruped robots powered by linear actuators. Simplifying the design is a core principle of their approach, not only for the legs, but for the whole robot.
However they will use a yet to be chosen brushless motor for the hip and shoulder lateral rotations, connected to an axel on which the leg is mounted. Another departure from the OpenDog.
This all meant that the leg design had to be update to fit actuators. It was decided to keep the aluminium extrusion structure, but they redesign their own knee join, and attachement to the body. They also elected to keep an architecture based around Arduinos for now, each leg having an Arduino of its own, being controlled by a main Arduino board. The main processor will however need to be upgraded for something more powerful once the robot proves stable enough to walk.
In order to test their idea, they are building a test bench and a first leg prototype.
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.